
仿鸟型扑翼飞行器气动/结构/飞行力学耦合研究进展
2018-03-09 07:18宋笔锋宋文萍杨文青西北工业大学航空学院陕西西安710072
空气动力学学报 2018年1期
薛 栋, 宋笔锋, 宋文萍, 杨文青(西北工业大学 航空学院, 陕西 西安 710072)
0 引 言
自然界大约有100万种昆虫和9000种鸟类[1],这些飞行生物向人类展示其卓越飞行能力的同时也启发着人类研制类似的扑翼飞行器。
在最近20年里,人们已经成功研制出一些仿昆虫型和仿鸟型的扑翼飞行器(如图1所示),如美国哈佛大学的“果蝇”飞行器[2]、德国Festo 公司的“Smart bird”[3]、中国南京航空航天大学的“金鹰”[4]和西北工业大学的“信鸽”等[5]。

(a) 美国“果蝇” (b) 德国“Smart bird”

(c) 南航“金鹰” (d) 西工大“信鸽”
图1国内外具有代表性的扑翼飞行器
Fig.1RepresentativeFMAVs
未来的仿鸟型微型飞行器具有以下特点:气动性能好(能主动适应和利用不同气流环境)、机动性强(可穿越狭小复杂空间)、飞行效率高(低能量消耗获得长距离飞行)、易于隐身(采用仿生飞行的方式迷惑敌方)等优势,因而可克服微型固定翼及旋翼无人机成本高、能量利用率低、隐身能力弱等缺陷,具有巨大的发展潜力和应用前景。
目前的仿鸟型微型飞行器主要从飞行方式进行仿生,即单纯靠扑动翼扑动同时产生升力和推力进行飞行,但气动效率与鸟类相比仍然有很大差距,此外在传感、驱动和控制等方面鸟类飞行机理的研究仍然处于初级阶段,所以亟需进一步的深入研究才能使仿鸟型微型飞行器具有像鸟类一样卓越的飞行能力。本文主要从气动、结构与飞行稳定性等方面进行分析和总结。
仿鸟型扑翼飞行器和仿昆虫型扑翼飞行器虽然都属于扑翼飞行器,但它们的飞行机理却有着很大区别。
如图2[6]所示,仿鸟型扑翼飞行器像鸟类一样以平飞为主要飞行方式,扑动频率一般在10~20 Hz,升力主要来源于前飞速度产生的升力。而仿昆虫型扑翼飞行器则与昆虫类似,其主要飞行状态是悬停,扑动频率为20~600 Hz[7],它们的升力主要靠扑动翼的纯扑动产生。由于其具有很高的扑动频率,且扑动翼质量占总重量的比例较小(小于5%),所以机体受扑动翼的影响较小,飞行过程中不会产生明显振动,所以气动、结构与飞行力学之间的耦合问题不是很突出。相反,仿鸟型扑翼飞行器的低扑动频率和高扑动翼质量占比,使得气动、结构与飞行力学的耦合关系很强,是设计高效、高性能仿鸟型扑翼飞行器不能忽略的问题。
如图3所示,仿鸟型扑翼飞行器的研制是一个多学科设计过程,目前仍面临着以下问题:1) 鸟类和仿鸟型扑翼飞行的非定常气动机理尚不明确;2) 柔性扑动翼结构形式复杂、扑动过程中会产生大幅变形等特点,针对该类气动结构耦合问题目前缺少既高效又相对准确的计算方法;3) 缺乏高精度、高效的气动、结构与飞行动力学耦合的计算方法,不能满足控制律设计和优化设计的输入需求。只有解决好上述各个学科的难点问题和多学科之间的耦合问题,才能设计出像鸟类一样具有卓越飞行能力的扑翼飞行器。

图3 仿鸟型扑翼飞行器多学科设计过程Fig.3 Multidisciplinary design of bird inspired FMAV
本文的主要内容包括:仿鸟型扑翼飞行器的气动机理研究现状,包括非定常气动机理方面;气动结构耦合研究现状,及其尺度律的研究现状;动力学建模方法、飞行稳定性分析方法的研究现状;以及通过耦合气动、结构与飞行力学来研究扑动翼柔性对飞行稳定性影响的研究进展。
1 仿鸟型扑翼飞行器气动机理
1.1 无量纲气动参数
为方便论述,先介绍4个常用的描述扑翼飞行的无量纲气动参数。
雷诺数Re描述的是流体的惯性力和黏性力的比值,定义如下:
Re=ρfLrefUref/μ
(1)
式中:ρf为流体介质密度,Lref为参考长度,Uref为参考速度,μ为流体介质的黏性系数。
自然界飞行生物的雷诺数范围横跨了6个数量级,从最小飞行昆虫接近1的雷诺数到潜水猎鹰的100万雷诺数[7]。鸟类和仿鸟型扑翼飞行器的雷诺数通常大于10000,此时边界层容易经历层流/湍流转捩,这些流动状态对该类飞行的气动特性起着关键作用。
前进比J反映的是尾涡脱落对推进效率的影响,定义如下:
J=U∞/(2fARcmφ)
(2)
式中:U∞为来流速度,f为扑动频率,AR为展弦比,cm为扑动翼的平均气动弦长,φ为扑动幅度,当J=0时表示扑翼飞行的悬停状态。根据研究结果[8],自然界中飞行生物前进比的范围约为0~5,具有较高推进效率的前进比范围为1.25~2.5。
罗斯比数Ro代表的是惯性力和科氏力的比值,该参数影响着前缘涡的稳定性,定义如下:

(3)
自然界中飞行生物的罗斯比数范围是1~10, 前缘涡稳定的条件是要求罗斯比数一般小于4[9]。
减缩频率k表征的是扑动运动的非定常程度,定义为流体扰动的空间尺度与弦长的比值:
k=πfcm/Uref
(4)
上述四个无量纲参数分别决定着仿鸟型扑翼飞行器在飞行过程中湍流的发生(雷诺数Re)、尾涡的形态(前进比J)、前缘涡的稳定性(罗斯比数Ro),以及飞行过程中的非定常性(减缩频率k)。
1.2 研究现状
为能研制出像鸟一样高飞行效率的扑翼飞行器,首先需要研究清楚鸟类飞行的空气动力学机理。
1909年Knoller和Betz发现二维翼型在扑动过程中可以同时产生升力和推力,这一发现被称为Knoller-Betz效应[10-11]。Von Karman和 Burgers[12]首次提出扑动翼型产生阻力或推力与尾涡的位置和方向有关,阻力和推力相应的尾涡分别被称为卡门涡街和反卡门涡街。1953年,Bratt[13]通过实验验证了 Von Karman 和 Burgers 的结论。
由于鸟类和仿鸟型扑翼飞行器的减缩频率通常小于0.3,此时认为非定常气动机理的影响不是很显著[14],可以使用准定常的方法(Quasi-steady method)对这类扑翼飞行的气动力进行计算。例如激励盘理论[15]和Peters提出的Induced Inflow Theory(诱导入流理论)[16]。
虽然仿鸟型扑翼飞行器与仿昆虫型扑翼飞行器在飞行机理上有很大区别,但针对两者的数值计算方法和实验方法却是相近相通的。由于以昆虫为研究对象的数值计算和实验研究已经很全面和深入,因此在分析仿鸟型扑翼飞行器气动特性时可以参照和借鉴,例如在数值计算方面。早在1998年,Liu等[17]就通过求解基于时间推进的三维非定常Navier-Stokes方程,计算了昆虫飞行的非定常流场结构,并通过实验进行了验证。其他针对昆虫的气动特性的数值计算和实验研究还有很多,可以参考Shyy[6,18]等的综述文章,这里不再赘述。
国内对仿鸟型扑翼飞行过程中的空气动力学问题的研究起步较晚。在2003年, 南京航空航天大学的曾锐和昂海松[19]基于简化的绿头鸭扑动模型研究了扑动幅度和扑动频率等参数对平均升力系数的影响。同年,西北工业大学的龚凯[20]通过求解Euler方程研究了不同的扑动参数对气动特性的影响。2006年,杨淑利等基于改进的片条理论方法研究了扑动翼气动性能[21]。2008年,谢辉等[22]通过求解三维非定常N-S方程,开展了微型扑动翼的数值模拟计算。2010年,杨文青等基于距离减缩法的嵌套网格技术,实现了对微型扑翼飞行器全机气动特性的研究[23]。
在国内的扑翼气动实验方面,2007年,昂海松等针对扑翼微型飞行器开展了风洞实验工作,研究了柔性扑动翼产生升力和推力的流动机理,为柔性扑翼飞行器的设计提供了思路[24]。同年,西北工业大学邵立民等开展了初步的微型扑翼飞行器风洞实验[25]。2008年,王利光等通过对风洞实验系统的改进,研究了扑翼飞行器气动力和功耗的影响因素[26]。随后在2014年,王利光等在风洞实验系统的基础上引进了高速摄像系统,实现了柔性扑动翼气动力和结构变形量的同步测量[27]。
1.3 非定常气动机理
虽然昆虫在飞行过程中有很多非定常气动机理(Clap and Fling机制,快速旋转和尾迹捕捉等)[18],但是在鸟类飞行过程中仍没有发现类似的气动机理[28]。
随着最近几年关于前缘涡对鸟类和仿鸟型扑翼飞行影响研究的深入,发现前缘涡对该类飞行过程中气动力的产生不能被忽视,例如有研究发现有的鸟类在慢速前飞过程中前缘涡可以提供高达49%的升力[29],如图4所示。

图4 一种叫Ficedula hypoleuca鸟在飞行速度为1 m/s时翅膀外段的前缘涡PIV云图,涡量大小范围从-2000/s (红)至2000/s (白) [29]Fig.4 Air movements induced by the flapping wing of a flycatcher flying at V∞=1 m/s at the hand wing section. Color bars in PIV images refer to vorticity ranges, scaled from -2000/s (red) to 2000/s (white)[29]
那么影响自然界中飞行生物前缘涡形态有哪些因素呢?其中一个重要因素就是雷诺数。不同种类的飞行生物具有不同的雷诺数范围,如图5所示。在图5的左上方分别显示了在雷诺数为120和1400时的翼型剖面的速度场,同时在其上面叠加了展向速度的云图,云图范围从0 m/s(白色)至0.5 m/s(黑色),可以看出当处于昆虫的雷诺数范围时(2000以下),前缘涡的展向速度随着雷诺数的增加而增加,而展向速度直接影响前缘涡的稳定性[9]。图5右上方则显示当雷诺数高于1400时,可以发现前缘涡开始出现分叉和破裂。

图5 雷诺数对前缘涡的影响[9]Fig.5 Reynolds number (Re) effect on LEV formation [9]
很多研究者发现昆虫能够保持前缘涡的稳定,从而使失速延迟[18]。不同于昆虫,鸟类或仿鸟型扑翼飞行器的雷诺数通常大于10000,此时前缘涡会对气动特性有怎样的影响呢?Hubel等[30]通过风洞实验对一个仿鸟模型进行了测试,发现在鸟类飞行的雷诺数和减缩频率范围内普遍出现了前缘涡。并且前缘涡的出现、脱落和分离与雷诺数、减缩频率有很大关系。由于展向上不同站位有着不同的流动状态,所以前缘涡对升力的有益影响和流动分离造成失速的不利影响可能会相互抵消。同时前缘涡会增大阻力,即削弱扑动产生的推力作用。此外,与在昆虫飞行过程中发现稳定的前缘涡现象不同,实验中仿鸟模型的前缘涡极易脱落。
虽然Hubel的实验没有得到稳定的前缘涡增升机制,但自然界中的鸟类有可能通过主动控制翅膀展向的扭转、弯度和有效攻角等参数实现对前缘涡的控制和利用。希望今后通过对这一方面的深入研究,实现对仿鸟型扑翼飞行器气动效率的提高。
2 气动结构耦合研究
2.1 国内外研究现状
昆虫和鸟类在飞行过程中,利用翅膀的有益变形可以在降低功耗的同时提高推力[31]。利用这一点,扑翼飞行器的扑动翼通常采用柔性轻质结构。而轻质结构还可以降低扑动翼的惯性力带来的功耗。
国外研究者在柔性扑动翼气动结构耦合的数值计算和实验方面开展了很多工作。Shyy等[32]在2010年针对柔性扑动翼气动结构耦合的数值计算和实验方面进行了比较详细和全面的总结,这里仅介绍具有代表意义的研究工作。
在实验研究方面比较有代表意义的是Heathcote等人[33]和Wu等[34]的工作。Heathcote等通过水洞实验研究了柔性扑翼作沉浮运动时,弦向和展向的刚度对推力特性的影响。结果表明,柔性扑翼比刚性扑翼能产生更大的推力。该实验数据也经常被用来验证数值计算的正确性。
Wu等通过更复杂的实验手段研究了扑动翼柔性变形与气动特性的关系。具体实验方法是通过数字图像相关技术测量结构变形,利用六分量天平测量扑翼所受到的气动力和惯性力,流场信息则通过数字粒子图像测速技术(DPIV)获取。他们的研究结果表明:扑动翼的结构特性对气动特性的影响很大,过柔和过刚的扑动翼结构都不能得到好的气动特性。结构特性与气动性能之间的具体关系将在下文中的尺度律的研究中进行介绍。
在扑动翼气动/结构耦合的数值计算方面,Kim等[35]基于修正的片条理论模型开发了气动结构耦合计算模型,并对柔性扑动翼的气动特性进行了数值模拟,计算结果与实验值吻合良好。Unger等[36]通过求解非定常雷诺平均N-S方程,并耦合基于有限元方法的非线性结构求解器,研究了仅具有弦向柔性的扑动翼的气动特性。
国内对扑翼飞行器气动结构耦合研究方面,西北工业大学的杨文青等[37]基于非定常雷诺平均N-S方程耦合静态结构方程,研究柔性扑动翼的气动特性。陈丽利等[38-39]基于结构动力学方法开发了柔性扑动翼的CFD/CSD耦合求解程序,并在计算过程中考虑了结构惯性力的影响,实现了对柔性扑翼气动特性的更准确模拟。
2.2 气动/结构耦合的尺度律分析
由于柔性扑翼飞行的气动结构耦合计算不仅涉及到复杂的非定常气动计算,还涉及各式各样的扑动翼气动外形、结构布局以及运动参数,这些参数的繁杂增加了柔性扑动翼气动性能分析的难度。而尺度律的研究可以较好地解决这个问题。
Kang等[31]对柔性扑动翼的气动、结构进行了量纲分析,并引入三个无量纲的结构参数用来分析扑动翼的柔性对气动特性的影响。
其中参数ρ*表示结构密度与流体密度的比值,定义如下:
ρ*=ρs/ρf
(5)
式中,ρs为各向同性材料组成的扑动平板结构的密度,ρf为流体介质的密度。
h*表示扑动翼厚度与参考弦长的比值,定义如下:
h*=h/cm
(6)
式中,h为扑动翼的厚度,cm为扑动翼的平均气动弦长。ρ*h*用来表征扑动翼结构的惯性力与流体惯性力的比例关系。
f*表示动频率与扑动翼结构的一阶固有频率的比值:
f*=f/f1
(7)
式中,f为扑动频率,f1为扑动翼结构的一阶固有频率。当该比值很小时表示扑动翼接近刚性,此时扑动翼的变形很小,其位移主要由扑动运动决定。


图6 无量纲的变形量与平均升力的关系[40]Fig 6 Scaling law betweenγ and [40]

(8)

(9)
根据图6可知,无论是昆虫的翅膀还是人造的扑动翼,它们的气动特性的表征参数与结构特性的表征参数呈现很好的线性相关。因此,研究人员可以通过这种简单关系实现对柔性扑动翼的快速性能分析。
由于该方法在计算过程只考虑了结构的一阶模态,气动计算方面只考虑了附加质量力的影响,因此计算精度有待进一步提高。此外该方法只考虑了各向同性材料构成的平板结构。由于扑动翼的展向刚度通常需要比弦向的刚度大1~2个数量级[41-42],因此人造扑动翼一般通过碳杆-薄膜结构来实现这一刚度分布要求,因此需要对这种各向异性材料构成的复杂结构的扑动翼进行尺度律分析。
3 扑翼飞行器的飞行动力学研究
3.1 扑翼飞行器的运动方程
Gebert和Gallmeier[43]首次推导了扑翼飞行的运动方程,并考虑了扑动翼惯性力、机体惯性力和惯性矩的变化影响。孙茂等[44]发现方程中的一些错误,并且重新进行了推导,得到:

(10)

(11)

3.2 仿鸟型扑翼飞行器动力学建模过程中考虑扑动翼惯性力的必要性
随着飞行器的尺寸和质量增加,仿鸟型扑翼飞行器的扑动翼质量占总重的比例通常会超过昆虫和仿昆虫型扑翼飞行器。那么质量占比具体为多少时就需要考虑扑动翼惯性力的影响呢?
Orlowski和Girard[45]对此问题展开了研究,发现如果直接忽略扑动翼的惯性力可能在动力学和控制问题中导致不一样甚至完全错误的结果。
Caetano等对此问题开展了定量研究[46]。研究对象选取了两种布局的飞行器,一种是X布局四翼扑翼飞行器“DelFly II”,另一种是双翼扑翼飞行器。同时采用了两种动力学模型进行建模,一种是单刚体运动方程,另一种是考虑扑动翼惯性力的多体动力学模型。基于这两种模型,并通过飞行实验得到的位移和姿态信息来辨识飞行过程中的气动特性。
图7为不同布局飞行器在垂直于机身轴线方向的升力的相关系数随着质量系数的变化历程。两组数据的相关系数越接近1,代表两组数据之间误差越小;反之,越接近0,代表两组数据之间的误差越大。
由图7可知,具有对称扑动的四翼布局的相关系数比传统布局的两翼布局的要高,说明单刚体动力学模型在四翼布局的适用范围要广,这是因为四翼布局的飞行器在扑动过程中会产生对称的垂直于机体轴线方向的力,由于方向相反,会相互抵消,从而减少扑动翼的惯性力对机体运动的影响。
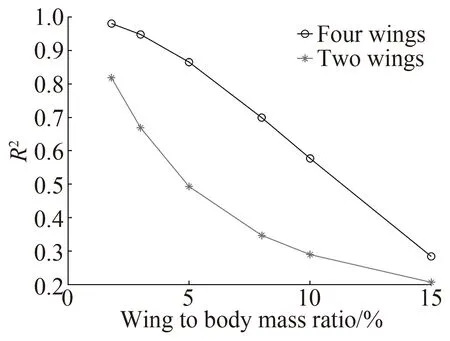
图7 不同布局的Z向气动力的相关系数随着扑动翼质量占比的变化 [46]Fig.7 Coefficient of determination of the Z force with mass ratio for both configurations [46]
此外,随着扑动翼质量占比的增加,两种方法获得的升力之间的相关系数逐渐下降,说明误差越来越大。说明质量占比越大时用单自由度的刚体运动模型得到的结果越不准确,需要用较为复杂但更为精确的多体动力学模型进行建模分析。
3.3 扑翼飞行器动力学特性分析
由(10)和式(11)可知,扑翼飞行器纵向的运动方程是一个非线性周期系统,目前有三种方法分析该系统的稳定性。
第一种是直接平均法,常用于分析昆虫或仿昆虫扑翼飞行器的飞行动力学特性[47-54]。
由于研究对象的扑动频率较高并且具有较小的扑动翼质量占比,在推导扑翼飞行器的动力学方程时通常基于以下三个假设和方法[44]:1) 由于扑动翼的扑动周期远远小于机体运动的时间尺度,从而可以将非自治的周期系统在扑动周期内进行平均,将系统方程变为自治的常微分方程;2) 作用在机体上的扑动翼惯性力引起的机体振动量为小量,其高阶量可以忽略;3) 扑动翼产生惯性力关于扑动周期的平均值近似为0,从而可以在方程中略去。
基于上述假设,纵向运动方程由非线性时间周期系统变为了非线性的时不变系统,进一步线化处理可以得到线性时不变系统,而后者的稳定特性可以通过该线性系统矩阵的特征值获得。
第二种分析方法是将非线性的周期系统变为线性周期系统,然后用Floquet方法去分析。Dietl和Garcia[55]第一次使用了该方法分析扑翼飞行器的稳定性。他们的结果和Taylor等使用直接平均方法的结果类似,可以得到一个稳定的振荡特征模态、一个衰减特征模态和一个发散特征模态。
Su和Cesnik[56]同样使用该方法分析了柔性扑翼飞行器的稳定性。在扑翼飞行器的纵向方向,他们分别得到一个不稳定的振荡模态、一个发散模态以及一个衰减模态。他们还研究了系统的模态随着扑动翼的刚度和惯性力增加的变化趋势,并发现扑动翼的惯性力具有不稳定效果,尤其在衰减模态中。
第三种是Taha等提出的高阶平均方法[57]。相比于Floquet理论,平均理论最主要的优势是省去了繁琐的配平过程。他们使用二阶平均方法分析了扑翼飞行器的纵向稳定性,发现对具有较低扑动频率系统,直接平均方法不能够得到正确结论,当扑动频率与机体的运动频率之比大于100时才可以使用。
那么上述三种方法的适用范围和对象究竟有什么区别呢?Wu和Sun[58]对此展开了研究,他们用直接平均方法和Floquet方法分别对两种具有不同翅膀质量占比的昆虫(蚜蝇和鹰蛾)进行了稳定性分析。
由于蚜蝇具有相对高的扑动频率和小的翅膀质量占比,因此在飞行过程中具有小的机体运动,鹰蛾则具有相对较低的扑动频率和较高的翅膀质量占比,飞行过程中具有相对较大幅度的机体运动。最后他们采用N-S方程耦合多体动力学方程进行了验证。计算结果表明,对于蚜蝇这种研究对象该两种方法得到的结果几乎一致,而对于鹰蛾,直接平均方法则出现较大的误差。说明对于扑动频率较低并且翅膀质量占比较大的昆虫,平均方法不能满足要求,需要用考虑周期运动的Floquet方法。
以上方法针对的研究对象都为昆虫或仿昆虫型扑翼飞行器,由于仿鸟型扑翼飞行器的扑动频率更低并且翅膀质量占比更大,因此在针对该类飞行器进行飞行稳定性分析时应该使用高阶平均方法或Floquet方法。
4 扑翼的柔性对飞行稳定性的影响
有些研究在分析昆虫或微型扑翼飞行器的飞行稳定性时, 为了分析方便,通常假设扑动翼在气动力的作用下没有变形,或者认为变形不会对昆虫或者扑翼飞行器的稳定性产生重要影响[44-45,59-60]。但是最近的一些研究表明,扑动翼的柔性不仅在气动分析中具有不可忽视的重要性[5,31],而且柔性对扑翼飞行器的稳定性也有重要影响。而对这一内容的研究需要通过气动、结构与飞行力学的耦合实现。
Richter和Patil[61]使用不同刚度的扑动翼研究了扑动翼柔性对扑翼飞行器稳定性的影响。研究对象是Wood等设计的Robofly[2]。他们首先建立了扑翼飞行器气动结构耦合飞行动力学的模型。其中运动方程由拉格朗日方程推导,并使用低阶的有限元模型来对扑动翼的结构进行建模,使用准定常气动理论计算气动力。流动非定常效应通过考虑简单的诱导入流理论。使用周期打靶法确定出三种不同柔性程度的扑动翼和刚性翼在悬停状态的周期解,然后使用Floquet理论对这四种情况进行了稳定性分析。
图8为四种布局对应系统的纵向特征值。图中可以看出系统在纵向由四个非周期的两个稳定的和两个不稳定的指数型运动组成,没有周期振荡运动。其中特征模态1主要由俯仰运动和水平运动构成。柔性布局对应的半幅时间普遍要小于刚性翼的,且柔性程度越大,改变的程度越明显。与特征模态1相反,四种布局的特征模态4是一个不稳定的指数发散运动,而柔性布局比刚性翼布局更不稳定。对于特征模态2和3,柔性的影响则不明显。最后得出结论:柔性会放大稳定和不稳定特性,并且降低振荡模态的阻尼作用。

图8 四种结构布局对应系统的纵向特征值[61]Fig.8 Longitudinal eigenvalues of the flapping wing system with different wing structure[61]
Bluman、Sridhar和Kang[62]同样研究了扑动翼的柔性对悬停状态下飞行器纵向稳定性的影响。他们使用牛顿第二定律推导了运动方程。对刚性与柔性翼的气动计算,他们分别采用了准定常方法以及二维N-S方程耦合欧拉-伯努利梁的程序。基于上述方法他们评估了系统的纵向稳定性。
为了更好地比较,刚性翼被设计为绕着前缘主动旋转,旋转角度直接从柔性翼的结构变形量得到。由于两种布局的运动基本一致,刚性翼和柔性翼的运动差别主要来源于以下几个方面:1)柔性翼的翼型弯度;2)流场不同的涡结构;3)机体运动误差的累积放大。
计算结果表明,具有刚性和柔性扑动翼系统的纵向响应有很大差别,如图9所示。由图可知,在机体x方向,柔性翼对应的机体以相对较小的速度向着机尾方向运动,而刚性翼对应的机体则以较大的速度向着机头方向运动。在机体y方向上,运动方向虽然一致,但由于柔性翼比刚性翼产生更大的升力,所以柔性翼朝着y正方向的运动更为明显。在俯仰方向,柔性翼的机体俯仰速度明显小于刚性翼机体。

图9 刚性翼与柔性翼的纵向稳定性(u+、w+、q+分别代表无量纲的机体坐标系下的x方向速度、y方向速度以及俯仰速率)[62]Fig.9 Longitudinal response of the FWMAV with rigid wing and flexible wing in a near-hover condition[62]
薛栋等[63]对扑动翼柔性对扑翼飞行器的纵向稳定性的影响也作了研究。通过对分别配置刚性扑动翼和柔性扑动翼的扑翼飞行器的纵向稳定性进行了比较,据此研究了扑动翼的柔性对扑翼飞行器前飞过程中纵向稳定性的影响。
具体方法是首先通过CFD对刚性扑动翼的气动导数进行计算,同时使用CFD/CSD耦合的方法对柔性扑动翼的气动导数进行计算,通过分析纵向运动小扰动方程的特征根和特征向量,比较了两种不同扑动翼对应系统的纵向稳定性。结果为柔性扑动翼对应的系统为稳定的,刚性翼对应的系统则为不稳定的,说明扑动翼的柔性改变了系统的稳定性。此外,研究结果还表明,扑翼飞行器的重心是影响纵向稳定性的一个关键因素,通过设计重心的位置可以改变扑翼飞行器的纵向稳定性。
以上三个研究分别通过不同方法对不同的研究对象进行了扑动翼柔性对飞行稳定性的影响研究。研究结果表明,扑动翼的柔性会影响系统的稳定性,但具体是增稳还是破坏稳定,需要具体问题具体分析,不能一概而论。
5 总结与展望
虽然仿鸟型扑翼飞行器在飞行机动性和飞行效率等方面具有巨大发展潜力,但目前仍面临着很多尚未解决的难题。本文通过对仿鸟型扑翼飞行器的气动机理研究、气动结构耦合研究、动力学建模、飞行稳定性分析方法以及扑动翼柔性对飞行稳定性的影响研究进行了回顾和分析,建议今后针对仿鸟型扑翼飞行器的研究需关注以下几个方面:
1) 目前缺乏对仿鸟型扑翼飞行器非定常气动机理的研究,尤其在雷诺数大于10000时前缘涡的稳定条件和稳定方法,这一方面值得研究人员继续关注并作深入研究;
2) 由于仿鸟型扑翼飞行器的扑动翼的气动和结构之间存在强耦合,而非定常流场求解和非线性结构动力学计算问题都需要较大的计算代价,严重制约着扑动翼气动性能评估和结构设计速度。尺度律虽然是一种解决思路,但目前针对各向异性材料构成的复杂扑动翼结构的尺度律分析理论仍为空白;
3) 仿鸟型扑翼飞行器的低扑动频率和高扑动翼质量占比,使得其柔性扑动翼的扑动运动与机体运动有较强的耦合,因此在分析气动特性和飞行稳定性时需要将气动、结构和飞行动力学进行耦合。由于每个问题的求解都需大量的时间成本和计算资源,三个问题的耦合计算会使计算量成倍增长,如何利用较为精确的计算结果和实验结果构造出满足实用要求的高效和简化的多学科耦合模型是目前迫切需要解决的问题。
[1]Shyy W, Aono H, Kang C, et al. An introduction to flapping wing aerodynamics[M]. New York, NY: Cambridge University Press, 2013
[2]Wood R J. The first takeoff of a biologically inspired at-scale robotic insect[J]. IEEE Transactions on Robotics, 2013, 24(2): 341-347
[3]Send W, Fischer M, Jebens K, et al. Artificial hinged-wing bird with active torsion and partially linear kinematics[C]//ICAS2012. Brisbane, Australia, 2012: 1148-1157
[4]郑祥明. 微型飞行器非线性飞行动力学与智能控制研究[D]. 南京: 南京航空航天大学, 2008
[5]Yang W Q, Song B F, Song W P, et al. The effects of span-wise and chord-wise flexibility on the aerodynamic performance of micro flapping-wing[J]. Chinese Science Bulletin, 2012, 57(22): 2887-2897
[6]Shyy W, Kang C K, Chirarattananon P, et al. Aerodynamics, sensing and control of insect-scale flapping-wing flight[J]. Proceedings Mathematical Physical & Engineering Sciences, 2016, 472(2186): 20150712
[7]Greenewalt C H. Dimensional relationships for flying animals[J]. Smithson Misc Collect, 1962, 144: 1-46
[8]Taylor G K, Nudds R L, Thomas A L R. Flying and swimming animals cruise at a Strouhal number tuned for high power efficiency[J]. Nature, 2003, 425: 707-711
[9]Lentink D, Dickinson M H. Rotational accelerations stabilize leading edge vortices on revolving fly wings[J]. J Exp Biol, 2009, 212: 2705-2719
[10]Knoller R. Die gesetze des luftwider-standes[J]. Flug-und Motortechnik (Wien), 1909, 3(21): 1-7
[11]Albert B. Ein beitrag zur erklaerung des segel-fluges[J]. Zeitschrift für Flugte-chnik und Motorluftschiffahrt, 1912, 3: 269-272
[12]Von Karman T, Burgers J M. Aerodynamic theory[M]. Berlin: Springer, 1934
[13]Bratt J B. Flow patterns in the wake of an oscillating airfoil[R]. Aeronautical Research Council R&M, 1953-2773
[14]Spedding G R. On the significance of unsteady effects in the aerodynamic performance of flying animals[J]. Contemp Math, 1993, 141: 401-419
[15]Shkarayev S, Silin D. Applications of actuator disk theory to membrane flapping wings[J]. AIAA J, 2010, 48(10): 2227-2234
[16]Peters D A, Karunamoorthy S, Cao W. Finite-state induced flow models, Part I: Two-dimensional thin airfoil[J]. Journal of Aircraft, 1995, 32: 313-322
[17]Liu H, Kawachi K. A numerical study of insect flight[J]. Journal of Computational Physics, 1998, 146(1): 124-156
[18]Shyy W, Lian Y, Tang J, et al. Aerodynamics of low reynolds number flyers[M]. Cambridge: Cambridge University Press, 2008
[19]Zeng R S, Ang H S. Aerodynamic computation of flapping wing simulating bird wings[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2003, 35(1): 6-12. (in Chinese) 曾锐, 昂海松. 仿鸟复合振动的扑翼气动分析[J]. 南京航空航天大学报, 2003, 35(1): 6-12
[20]Gong K. Numerical simulation of finite-span flapping wing byeuler equations[D]. Xi’an: Northwestern Polytechnical University, 2003. (in Chinese)龚凯. 有限翼展扑动翼的欧拉方程数值模拟[D]. 西安: 西北工业大学, 2003
[21]Yang S L, Song W P, Song B F, et al. Achieving reliability and validity of predicted aerodynamic performance of flapping wings for micro air vehicle(MAV)[J]. Journal of Northwestern Polytechnical University, 2006, 24(6): 768-773. (in Chinese)) 杨淑利, 宋文萍, 宋笔锋, 等. 微型扑翼飞行器机翼气动特性研究[J]. 西北工业大学学报, 2006, 24(6): 768-773
[22]Xie H, Song W P, Song B F. Numerical solution of Navier-Stokes equations for flow over a flapping wing[J]. Journal of Northwestern Polytechnical University, 2008, 26(1): 104-109. (in Chinese)谢辉, 宋文萍, 宋笔锋. 微型扑翼绕流的N-S方程数值模拟[J]. 西北工业大学学报, 2008, 26(1): 104-109
[23]Yang W Q, Song B F, Song W P. Distance decreasing method for confirming corresponding cells of overset grids and its application[J]. Acta Aeronautica et Astronautica Sinica, 2009, 30(2): 205-212. (in Chinese)杨文青, 宋笔锋, 宋文萍. 高效确定重叠网格对应关系的距离减缩法及其应用[J]. 航空学报, 2009, 30(2): 205-212
[24]Ang H S, Zeng R, Duan W B, et al. Aerodynamic experimental investigation for mechanism of lift and thrust of flexible flapping-wing MAV[J]. Journal of Aerospace Power, 2007, 22(11): 1838-1845. (in Chinese) 昂海松, 曾锐, 段文博, 等. 柔性扑翼微型飞行器升力和推力机理的风洞实验和飞行实验[J]. 航空动力学报, 2007, 22(11): 1838-1845
[25]Shao L M, Song B F, Xiong C, et al. Experimental investigation of flapping-wing MAV in wind tunnel[J]. Acta Aeronautica et Astronautica Sinica, 2007, 28(2): 275-280. (in Chinese)邵立民, 宋笔锋, 熊超, 等. 微型扑翼飞行器风洞试验初步研究[J]. 航空学报, 2007, 28(2): 275-280
[26]Wang L. Design and optimization for the propulsion system of the flapping-wing micro air vehicle[D]. Xi’an: Northwestern Polytechnical University, 2008. (in Chinese)王利光. 微型扑翼飞行器动力系统设计与优化[D]. 西安: 西北工业大学, 2008
[27]Wang L, Song B, Yang W, et al. Experimental characterization of a flexible membrane flapping-wing in forward flight[C]//ICAS2014. St. Petersburg. Russia, 2014
[28]Chin D D, Lentink D. Flapping wing aerodynamics: from insects to vertebrates[J]. Journal of Experimental Biology, 2016, 219(7): 920-932
[29]Muijres F T, Johansson L C, Hedenstrom A. Leading edge vortex in a slow-flying passerine[J]. Biol Lett, 2012, 8 (4): 554-557
[30]Hubel T Y, Riskin D K, Swartz S M, et al. Wake structure and wing kinematics: The flight of the lesser dog-faced fruit bat, cynopterus brachyotis[J]. J Exp Biol, 2010, 213: 34287-33440
[31]Kang C, Aono H, Cesnik C E S, et al. Effects of flexibility on the aerodynamic performance of flapping wings[J]. J Fluid Mech, 2011, 689: 32-74
[32]Shyy W, Aono H, Chimakurthi S K, et al. Recent progress in flapping wing aerodynamics and aeroelasticity[J]. Prog Aerosp Sci, 2010, 46: 284-327
[33]Heathcote S, Wang Z, Gursul I. Effect of spanwise flexibility on flapping wing propulsion[J]. Journal of Fluids and Structures, 2008, 24(2): 183-199
[34]Wu P, Ifju P, Stanford B, et al. A multidisciplinary experimental study of flapping wing aeroelasticity in thrust production[C]//AIAA Structures, Structural Dynamics, and Materials Conference, 2009: 4-7
[35]Kim D K, Lee J S, Lee J Y, et al. Anaeroelastic analysis of a flexible flapping wing using modified strip theory[C]//International Society for Optical Engineering(SPIE), 2008
[36]Unger R, Haupt M C, Horst P, et al. Structural design and aeroelastic analysis of an oscillating airfoil for flapping wing propulsion[R]. AIAA 2008-306
[37]Yang W, Song B, Wang L, et al. Dynamic fluid-structure coupling method of flexible flapping wing for MAV[J]. Journal of Aerospace Engineering, 2015, 28(6): 04015006
[38]Chen L L, Song B F, Song W P, et al. Research on aerodynamic-structural coupling of flexible flapping wing[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(12): 2668- 2681. (in Chinese ) 陈利丽, 宋笔锋, 宋文萍, 等. 一种基于结构动力学的柔性扑翼气动结构耦合方法研究[J]. 航空学报, 2013, 34(12): 2668-2681
[39]Chen L L, Song B F, Song W P, et al. Numerical aerodynamic-structural coupling research for flexible flapping wing[J]. Acta Aerodynamica Sinica, 2015, 33(1): 125-133. (in Chinese ) 陈利丽, 宋笔锋, 宋文萍, 等. 柔性扑翼气动结构耦合特性数值研究[J]. 空气动力学学报, 2015, 33(1): 125-133
[40]Kang C, Shyy W. Scaling law and enhancement of lift generation of an insect-size hovering flexible wing[J]. J R Soc Interface, 2013, 10: 20130361
[41]Combes S A, Daniel T L. Flexural stiffness in insect wings I: Scaling and the influence of wing venation[J]. J Exp Biol, 2003, 206: 2979-2987
[42]Combes S A, Daniel T L. Flexural stiffness in insect wings II: Spatial distribution and dynamic wing bending[J]. J Exp Biol, 2003, 206: 2989-2997
[43]Gebert G, Gallmeier P, Evers J. Equations of motion for flapping flight[C]//AIAA Atmospheric Flight Mechanics Conference. Monterey, CA, 2002. AIAA 2002-4872
[44]Sun M, Wang J, Xiong Y. Dynamic flight stability of hovering insects[J]. Acta Mech Sin, 2007, 23(3): 231-246
[45]Orlowski C T, Girard A R. Modeling and simulation of the nonlinear dynamics of flapping wing MAVs[J]. AIAA J, 2011, 49(5): 969-981
[46]Caetano J V, Weehuizen M B, Visser C C, et al. Rigid-body kinematics versus flapping kinematics of a flapping wing micro air vehicle[J]. Journal of Guidance, Control, and Dynamics, 2015, 38(12): 2257-2269
[47]Sun M, Xiong Y. Dynamic flight stability of a hovering bumblebee[J]. J Exp Biol, 2005, 208(3): 447-459
[48]Taylor G K, Bomphrey R J, Hoen J. Insect flight dynamics and control[C]//AIAA Aerospace Sciences Meeting and Exhibit. Reno, Nevada, 2006
[49]Taylor G K, Thomas A L R. Animal flight dynamics II: Longitudinal stability in flapping flight[J]. J Theor Biol, 2002, 214: 351-370
[50]Taylor G K, Thomas A L R. Dynamic flight stability in the desert locust[J]. J Theor Biol, 2003, 206: 2803-2829
[51]Taylor G K, Zbikowski R. Nonlinear time periodic models of the longitudinal flight dynamics of desert locusts[J]. J R Soc Interface, 2005, 2: 197-221
[52]Thomas A L R, Taylor G K. Animal flight dynamics I: Stability in gliding flight[J]. J Theor Biol, 2001, 212: 399-424
[53]Xiong Y, Sun M. Dynamic flight stability of a bumblebee in forward flight[J]. Acta Mechanica Sinica, 2008, 24(1): 25-36
[54]Sun M, Liu Y P, Wang J K. Dynamic flight stability of hovering insects: Theoretical analysis and numerical simulation[J]. Acta Aerodynamica Sinica, 2008, 26(z1): 6-13. (in Chinese ) 孙茂, 刘彦鹏, 王济康. 昆虫悬停飞行的动稳定性: 理论分析与数值模拟[J]. 空气动力学学报, 2008, 26(z1): 6-13
[55]Dietl J M, Garcia E. Stability in ornitho-pter longitudinal flight dynamics[J]. J Guid Control Dyn, 2008, 31(4): 1157-1162
[56]Su W, Cesnik C E S. Flight dynamic stability of a flapping wing MAV in hover[C]//52nd AIAA/ASME/ASCE/AHS/ASC Struc-tures, Structural Dynamics, and Materials Conference. Denver, Colorado, 2011
[57]Taha H E, Tahmasian S, Woolsey C A, et al. The need for higher-order averaging in the stability analysis of hovering, flapping-wing flight[J]. Bioinspiration & Biomimetics, 2015, 10(1): 016002
[58]Wu J H, Sun M. Floquet stability analysis of the longitudinal dynamics of two hovering model insects[J]. Journal of the Royal Society Interface, 2012, 9(74): 2033-2046
[59]Faruque I, Sean H J. Dipteran insect flight dynamics. Part 1: Longitudinal motion about hover[J]. Journal of Theoretical Biology, 2010, 264(2): 538-552
[60]Wu J H, Zhang Y L, Sun M. Hovering of model insects: Simulation by coupling equations of motion with Navier-Stokes equations[J]. Journal of Experimental Biology, 2009, 212(Pt 20): 3313-3329
[61]Richter M, Patil M. Influence of Wing Flexibility on the Stability of Flapping Flight[C]//AIAA Atmospheric Flight Mechanics Conference, 2013: 2-5
[62]Bluman J E, Sridhar M K, Kang C K. The influence of wing flexibility on the stability of a biomimetic flapping wing Micro air vehicle in hover[C]//AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. San Diego, California, USA, 2015
[63]Xue D, Song B, Song W, et al. Effect of wing flexibility on flight dynamics stability of flapping wing MAVs in forward flight[J]. International Journal of Micro Air Vehicles, 2016, 8(3): 170-180.
猜你喜欢
天然气与石油(2022年4期)2022-09-21
凤凰动漫(军事大王)(2022年1期)2022-04-19
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2020年3期)2021-01-14
民用飞机设计与研究(2020年1期)2020-05-21
劳动保护(2018年5期)2018-06-05
无人机(2017年10期)2017-07-06
科技创新导报(2017年8期)2017-06-07
南方文学(2016年4期)2016-06-12
小朋友·快乐手工(2015年5期)2015-06-06
