
三相异步电机暂态冲击电流抑制算法研究
2018-03-08 10:06陶伟涵刘建鹏刘梦阳
电子科技 2018年3期
周 敏,陶伟涵,崔 悦,刘建鹏,刘梦阳
(上海理工大学 光电信息与计算机工程学院,上海 200093)
目前,用于异步电机变频调速控制的典型方式有恒压频比(V/F)控制、矢量控制(Vector Control,VC)、直接转矩控制(Direct Torque Control,DTC)和智能控制等方法,其中VC、DTC及智能控制方式属于现代控制范畴[1-2],一般用于交流电机的精密调速;而对于一些无需获取精确转速的工业控制领域,考虑到成本及实现难易程度等因素,常采用开环V/F控制[3];尤其是具有较大滞后特性的系统,如本文所研究的叉车调速装置,为获得大转矩并保证操作的安全性,常设计成滞后性较大的调速系统。另一方面,由于未进行转速、电流闭环,无法限制其暂态冲击电流引起的过流现象[4-5]。一旦过流,将对主桥路甚至控制电路造成严重损害。因此,本文首先搭建了基于开环V/F控制的低压大电流调速系统,并设计一种峰值电流检测及抑制算法应用于该系统中,最终在该平台上验证了算法的可行性。对于工业应用具有一定的实用价值。
1 暂态冲击电流过流现象分析
三相异步电机因其结构简单、坚固耐用、运行可靠、成本低、易维护、可工作于恶劣环境等优点,在非调速或无需精准调速的工业领域得到了广泛的应用[6]。这类系统对转速无严格要求,但需对暂态冲击电流进行必要的预防及控制[7],以保证系统长期可靠运行。
对于上述系统,常见的过流现象包括启动过流、突加给定过流和突加负载过流[8]。其中,以中小功率等级的笼型异步电机为例,其空载启动电流一般可达到电机额定工作电流的5~7倍,而后两种情况视具体操作,其过流电流一般可达额定电流的3倍以上。图1为本实验平台电机空载半压启动时的电流波形图。由图1可见,空载半压启动情况下冲击电流幅值仍可达稳态电流的2~3倍,且持续时间为4个电流周期。若考虑全压或带载启动,则冲击电流幅值将更大且持续时间更长。
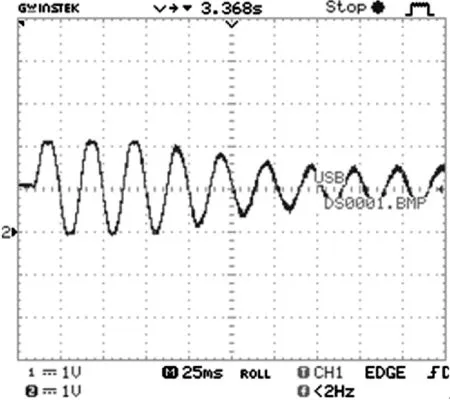
图1 启动电流波形图
暂态冲击电流的特点在于短时间内电流幅值突然增大,这将对三相逆变桥上的开关器件及电机定子绕组绝缘材质产生破坏性效果[9-10]。为有效消除暂态冲击电流造成的不良影响,要求控制方式必须迅速。本文所设计的电流抑制算法通过采集异步电机相电流可快速检测到冲击电流信息。并通过数字芯片运算输出控制信号,从而有效降低冲击电流造成的危害。
2 V/F调速系统设计
用于低压大电流调速系统的调速装置原理图如图2所示。为获得较大的输出转矩,该系统使用了减速盘传动,导致系统滞后性较大。采用传统的电流闭环控制,对于冲击电流的响应很难达到理想的控制效果[11-12]。甚至可能因为引进反馈环节导致系统可靠性下降,且实现较复杂。本文设计了电流抑制环节,对冲击电流进行调节。
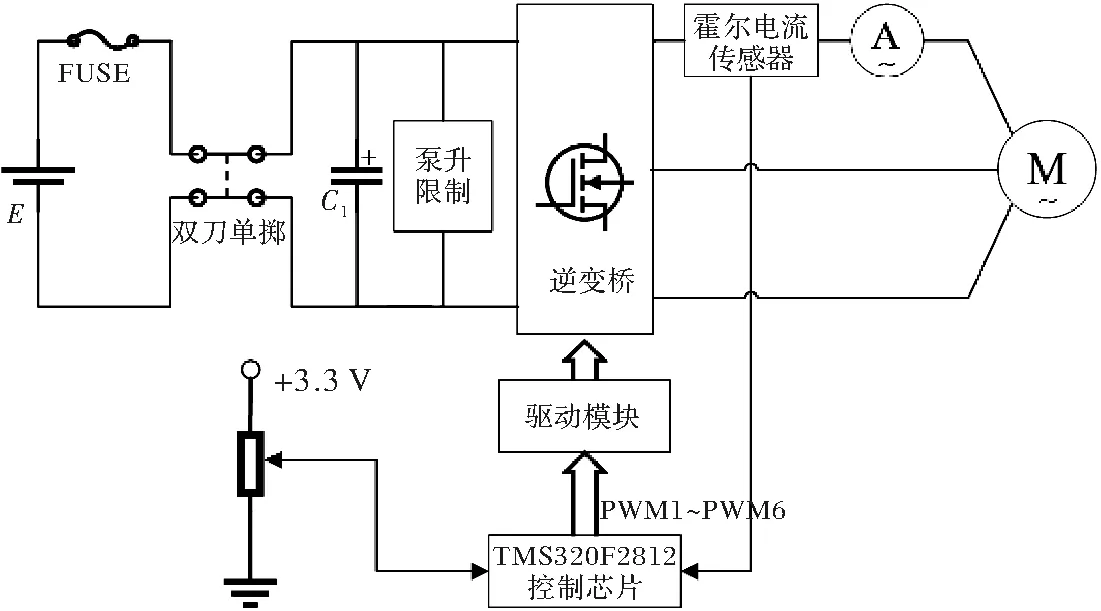
图2 异步电机调速系统结构图
如图2所示,该系统采用开环式V/F调速,在保证磁链恒定的前提下,尽量简化了系统的结构,使得输出力矩得到保障的同时,成本降低且系统实现简单。其工作流程为:首先,系统由24 V蓄电池组供电,经双刀单掷开关及母线电容滤波给到三相全控逆变桥,在控制信号驱动下使开关管有序通断,从而驱动电机运转。母线部分增加泵升限制电路减少开关管电压应力。为获取冲击电流信息,取电机一相电流,采用霍尔传感器测取电流信号给到控制芯片,从而构成电流抑制环节。
3 冲击电流抑制算法设计
3.1 电流检测方式选择
根据实现方式的不同,电流检测方式可选择间接测量母线电流,和直接测量电机输入相(线)电流。前者获得的为直流信号,后者为交流信号。母线电流较易测得且可以直接应用于PI控制器;而电机输入电流为交流电,不能直接用于设计PI控制器。一种做法是将获取的交流电流信号经clark、park变换得到直流量或构建PR(比例谐振)控制器。这两种做法虽然可行但坐标变换增加了系统的运算量,而PR控制器对系统精度有较高要求,不易实现,且在非基频处增益很小,不能解决频率偏移问题[13-15]。此外,为达到较快的调节特性,所获取的电流信号应能够及时反映冲击电流信息。而母线电流因存在滤波电路而导致了一定的滞后。从而不能很好地反映冲击电流信息。
综合上述分析,本系统将采用直接检测电机输入电流的测量方式。同时为能够与PI控制器结合,需对信号采集算法进行设计,以达到抑制暂态冲击电流的目的。
3.2 算法设计
为使电流传感器获取的交流信号应用于基于PI调节器的电流抑制环节,需对获取的电流信号进行处理。一种方法是获取一个电流周期内若干电流信号数据点,通过比较获取峰值信号,并与设定的阈值进行比较,从而确定冲击电流是否产生并进行相应调节。该方法需在一个电流周期内进行多次A/D转换,不仅占用系统资源且峰值信号准确与否与采样点个数直接相关;另一种方法是通过电机相电压推算电流峰值时刻并进行采样,该方法需获取电机相关参数,其流程如图3所示。
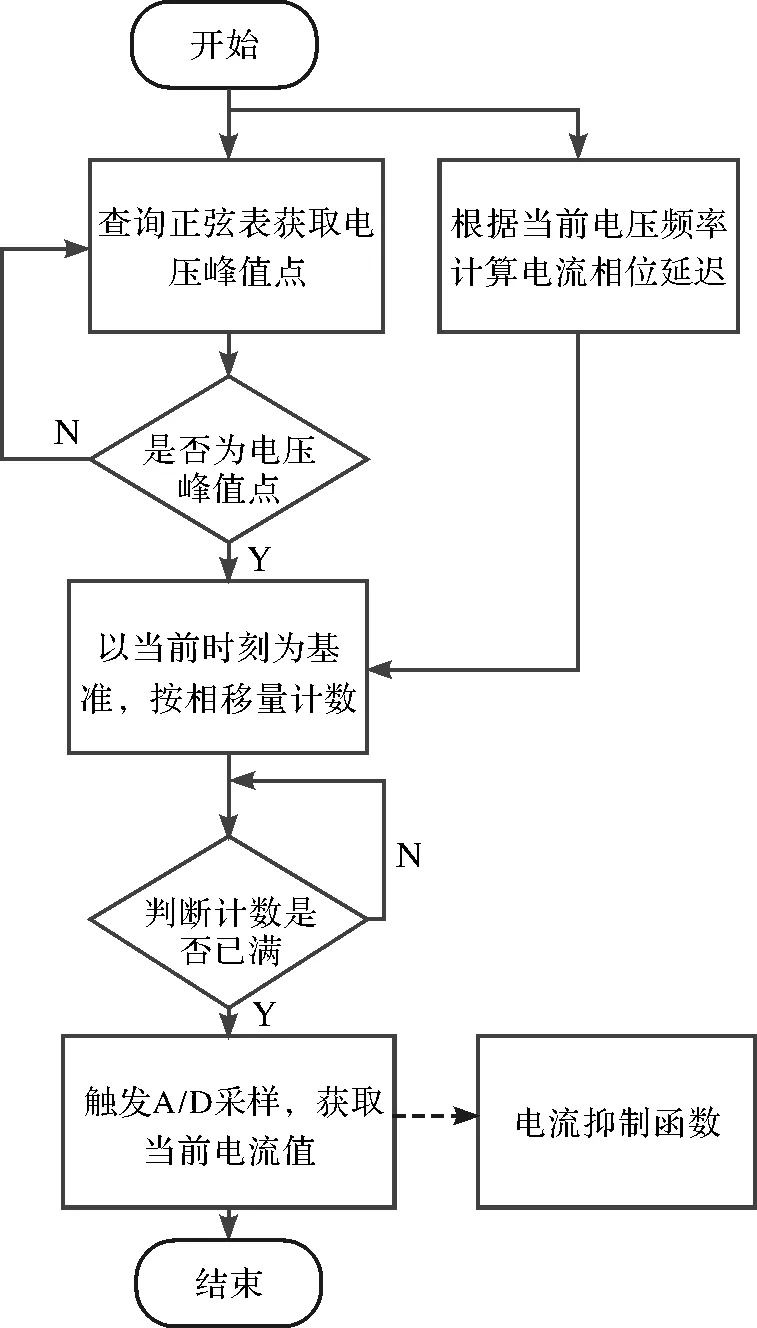
图3 方法二流程图
综合考虑上述两种方法,本文选取了第二种方法,其可以在占用少量系统资源的情况下较准确地获取交流电流的峰值数值。该算法的具体实现如下:由于异步电机调速系统具有高阶、非线性、强耦合等特点,为方便计算及算法实现,在一定误差范围内可作如下假设:(1)忽略空间谐波,设三相绕组对称,在空间互差120°电角度,产生的磁动势沿气隙周围按正弦规律分布;(2)忽略磁路饱和,各绕组的自感和互感都是恒定的。图4为Y型三相电机等效物理模型。
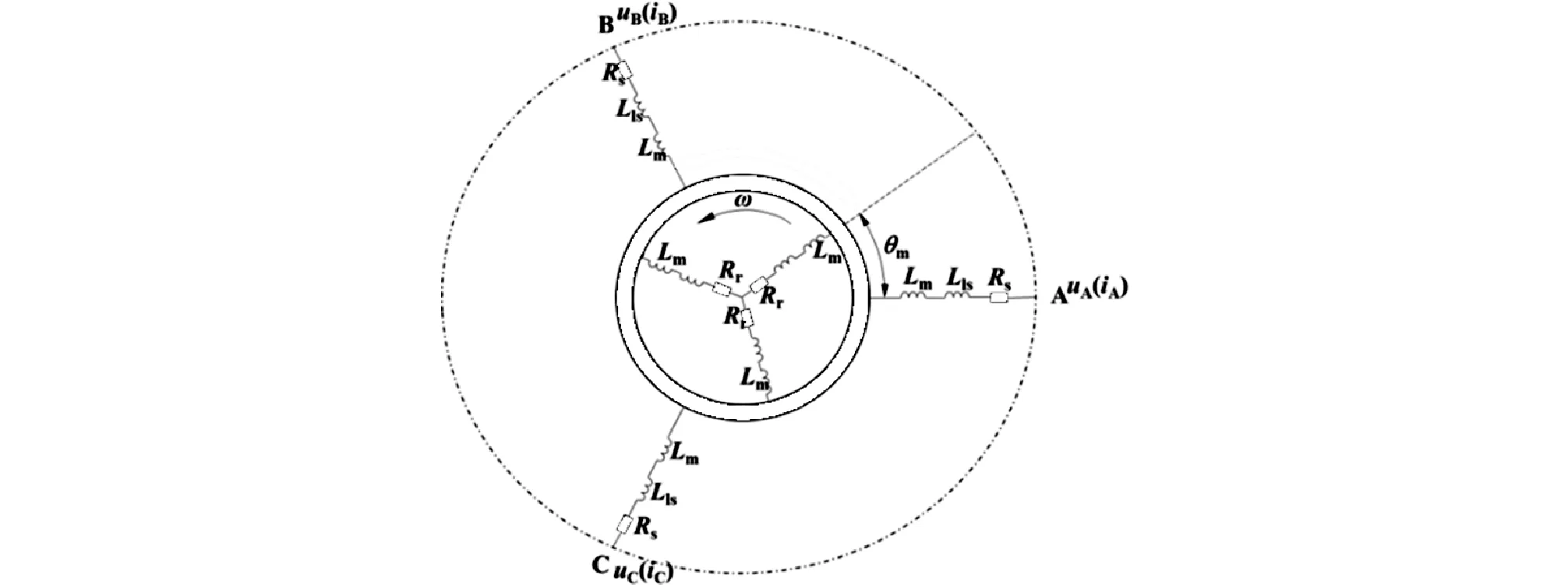
图4 异步电机调速系统结构图
由异步电机物理模型可得其电压方程(1)及磁链方程(2)。
(1)
(2)
基于上述假设,由于三相对称,且电阻、电感参数恒定。由式(1)和式(2)可推得电流相位延迟角θ计算公式(3),其中ω1为系统实时电压频率。
θ=arctan(ω1Ls/Rs)
(3)
由图3所示流程即可获得所需电流峰值信息。该方法获取的检测电流I1经A/D采样转化为离散数值,再通过式(4)计算得出逆变器输出占空比调节值,从而抑制冲击电流峰值变大。
(4)
式(4)中D为实时占空比参数,D0为占空比基数,P1、P2和P3为调节系数,可根据系统响应逐个确定。ek_I、ek_D分别为电流和占空比误差值。
4 硬件平台搭建
4.1 系统平台总体设计
根据上述设计的V/F调速系统所搭建的硬件系统平台如图5所示。整个系统分为两部分,即主电路与控制电路。主电路由直流母线、逆变桥、电流传感器和异步电机构成,其中逆变桥所用MOSFET管采用IR公司的IRF3206。控制电路包括控制芯片、驱动模块,驱动芯片为IR2110。
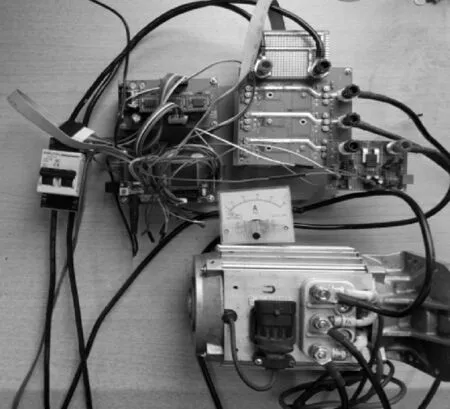
图5 硬件平台实物图
电压型逆变桥调制方式为SPWM调制,根据实测电机压频曲线,使系统沿压频曲线平滑调速。
4.2 电流检测模块设计
本文中用到的电流传感器为霍尔电流传感器芯片ACS758,该芯片供电电压为3.3~5 V,根据测量量程可分为50 A、100 A和200 A共3个等级。由于采用单电源供电,其静止位输出电平为供电电压Vcc的一半,且输出电平范围需进行调整,方能与DSP的A/D采样口兼容,电流检测单元的硬件原理图如图6所示。
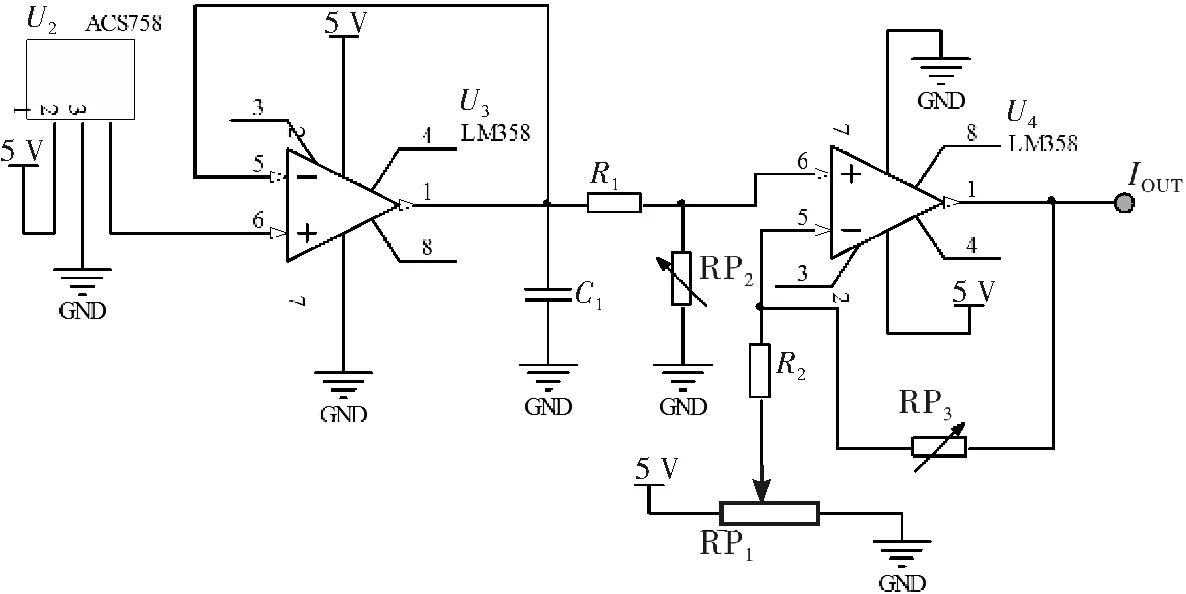
图6 电流检测单元原理图
其中,电位器RP1用于调节电流传感器静态输出电平位置,PR2和RP3用于设置输入到DSP的电流信号增益,需要注意的是RP2/R1应与RP3/R2数值保持一致。
5 实验结果及数据分析
由上述对暂态冲击电流现象的分析可知,产生冲击电流的情况可分为3类,即启动过流、突加给定过流和突加负载过流。以下是针对这3种情形,利用本文所设计算法在实验平台上所做的验证性实验。实验用电机及其他相关参数如表1所示。
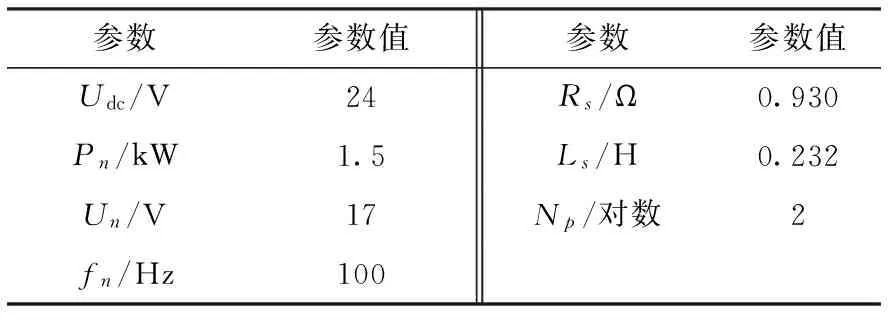
表1 实验参数列表
5.1 启动电流抑制
图7为异步电机半压启动的暂态冲击电流波形图。示波器的通道1用于显示采样时刻,通道2用于显示电流波形。
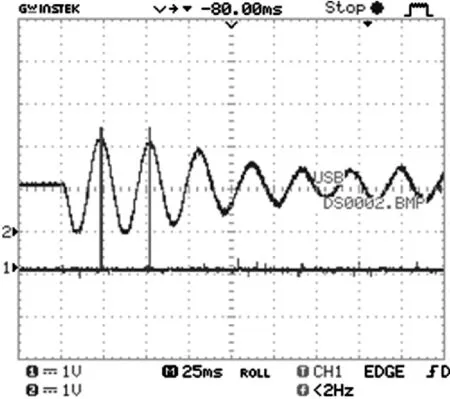
图7 启动冲击电流波形图
将图7与图1比较,可以发现采用了电流抑制算法的调速系统,其启动冲击电流幅值在被检测到超过设定阈值后,经控制器调节很快衰减到正常工作范围内,从而避免了冲击电流持续时间过长造成对电路上器件的损害。相比于未加控制情况下系统的冲击电流持续时间缩短了2个电流周期。且对于电流峰值的误差<5%(此处定义检测误差为W=((程序采样时刻-实际电流峰值时刻)/电流周期值)×100%)。
5.2 突加给定电流抑制
一般情况下电机调速时给定信号可视为一斜坡信号。当给定突然增大,则可近似为一阶跃信号,此时很容易产生暂态冲击电流。图8为系统以800 r/min运行情况下突然施加1 800 r/min设定信号时的电流波形图。
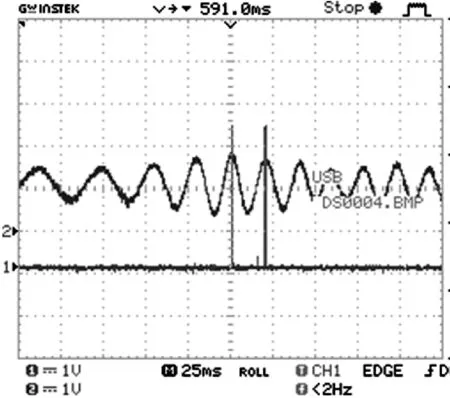
图8 突加给定冲击电流波形图
由图8可以看出,当设定调节过快,电机电流将产生冲击效应,抑制环节在冲击电流的第1、2周期均进行了调节,使电流迅速进入新的稳态。
5.3 突加负载电流抑制
对于开环的V/F调速系统,当负载突然加重,由于缺少转速闭环,电机转速将有大幅下降,此时,电机电流突升,形成暂态冲击电流。但当电机重新进入稳态,电流会回落至正常水平。而这一暂态过程中电流幅值大小及持续时间对于系统稳定运行十分关键。图9为增加了电流抑制环节的系统在突加负载时的电流波形图。
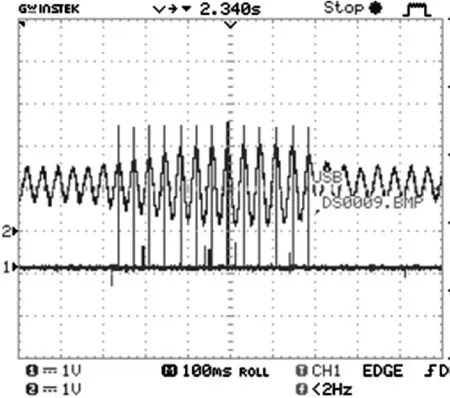
图9 突加负载冲击电流波形图
由图9可知,突加负载时,本系统过流现象较明显,但抑制环节的加入仍可使之维持在400 ms以内,且抑制环节响应较迅速。
6 结束语
针对V/F调速系统过流现象进行了系统的研究,在分析了过流产生原因的基础上提出了一种检测及抑制暂态冲击电流的算法。通过软硬件设计,搭建了实验验证平台,并在该实验平台上对3种典型的过流现象进行了量化实验。实验结果表明,该算法可以较准确地检测冲击电流信息并达到抑制冲击电流的目的。
[1] 王成元,夏加宽,孙宜标,等.现代电机控制技术[M].2版.北京:机械工业出版社,2014.
[2] 阮毅.电力拖动自动控制系统:运动控制系统[M].北京:机械工业出版社,2009.
[3] 徐谋.交流异步电机变频调速异常过流故障分析[J].装备应用与研究,2013(6):50-51.
[4] 晏国华.大型异步电动机的暂态冲击电流及其抑制方法[J].继电器,1998,26(3):38-42.
[5] 杨立永,李正熙,樊生文,等.一种交流异步电机电流控制装置及电流控制,中国:201010510897.4 [P].2010-10-19.
[6] 聂述霞,李智,牛军浩,等.低压大电流异步电机驱动及保护电路设计[J].桂林航天工业学院学报,2015(3):297-302.
[7] 彭帅.基于DSP的电动叉车交流驱动控制器的设计与实现[D].南京:南京理工大学,2013.
[8] 段卫东.三相异步电机的断相与过流保护[J].世界采矿快报,2000,16(4):114-115.
[9] 李红雨.一种新型的快速电流检测方法的研究[J].中国电机工程学报,2005,25(13):57-62.
[10] 刘文静,王民慧.电流检测方法研究[J].技术与应用,2012(4):28-30.
[11]YangJungmin,SeongWooKwak.Toleratingintermittentfaultsininput/stateasynchronoussequentialmachineswithaboundeddelay[J].IEEETransactionsonCircuit,2014,24(6):59-63.
[12]PardisRanjbarNoei,HedyehAKholerdi.Artificialrealtimedigitalcontrolofasynchronousmachine[J].IEEETransactionsonCircuit,2016,26(3):32-39.
[13] 刘满雀,姚若河.一种高精度电流检测电路的设计[J].中国集成电路,2014(3):53-57.
[14] 孙正是,陈后鹏,王倩,等.一种滞环恒流LED驱动电路的电流采样电路[J].电子科技,2016,29(1):1-4.
猜你喜欢
大电机技术(2021年5期)2021-11-04
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
电子制作(2018年14期)2018-08-21
电子测试(2017年23期)2017-04-04
电子制作(2017年19期)2017-02-02
电子制作(2016年11期)2016-11-07
水电站机电技术(2016年1期)2016-02-28
湖州师范学院学报(2015年4期)2015-03-11
电力工程技术(2014年5期)2014-03-20
