
机载多光谱LiDAR数据的地物分类方法
2018-03-06 07:33:48潘锁艳管海燕
测绘学报 2018年2期
潘锁艳,管海燕
南京信息工程大学遥感与测绘工程学院,江苏 南京 210044
与传统的摄影测量和光学遥感手段相比,LiDAR具有自动化程度高、受天气影响小、可获得高精度与高密度地球空间信息等优点,而得到了广泛的关注和应用。文献[1—4]指出利用LiDAR数据可以生成高精度的数字高程模型、等高线图和数字地表模型。文献[5]提出了去除LiDAR几何特征中一些不相关或冗余特征的特征选择策略,提高城市土地覆盖分类精度。文献[6]根据LiDAR三维点云数据分布特点,通过分类多时相LiDAR数据,成功提取出建筑物信息。文献[7]分析LiDAR全波形数据,利用树木和建筑物不同的回波特性区分树木和建筑物。
然而常规的LiDAR技术是单个近红外波段的不连续的空间点,无法达到无缝覆盖;同时缺乏有效的光谱信息,难以实现地物覆盖目标的无缝估算。因此,文献[8—12]指出融合LiDAR数据和高光谱或多光谱数据能够有效地提高地物几何结构以及在不同环境下地物识别的精度。如文献[13]融合高分辨率遥感影像与低密度的LiDAR点云,采用基于三维模型的方法计算树顶高度。文献[14]融合高光谱分辨率影像和机载LiDAR点云数据反演地表植被生物量,其结果精度比单独使用高光谱影像或者LiDAR点云数据时更高。文献[15]结合GeoEye高分辨率遥感影像和机载LiDAR数据,提出基于面向对象的模糊分类方法,试验结果的总体精度达到93.92%,分类精度相比单一遥感数据明显提高。
但是融合LiDAR点云数据与光谱影像数据进行地物目标识别时,如何将不同类型的数据精确地统一到同一空间坐标系仍然存在着巨大的问题。随着硬件技术的发展,一些研究机构与公司相继推出了多光谱甚至高光谱LiDAR系统原型,文献[16—18]研究发现多光谱/高光谱LiDAR系统可广泛应用于地形测绘、土地覆盖分类、无缝潜水测深、环境建模、森林调查和植被类型分类、自然资源管理和灾害响应等。文献[19]指出加拿大Optech公司2014年12月发布的第一台商业化多光谱LiDAR系统Optech Titan(包含3个波段:532、1064和1550 nm);国内的武汉大学也研制了多光谱LiDAR系统(包含4个波段:556、670、700和780 nm)。多光谱机载LiDAR技术具有数据获取速度快、光谱与空间几何数据在空间上(分辨率、配准等),时间上(动态场景、观测条件的变化等)相对完整和一致性的特点。文献[20]利用高光谱LiDAR数据实现云杉和松树的分类。文献[21]采用k-means算法从多光谱LiDAR数据中检测人造目标和自然目标。相对于多光谱LiDAR系统硬件设备和数据获取方法相比,基于多光谱LiDAR数据的地物目标识别与分类等研究刚刚起步。因此,研究提高多光谱LiDAR数据的智能化解译水平与目标识别的自动化程度具有重要的应用价值。本文提出了基于支持向量机(SVM)的多光谱LiDAR数据地物分类研究。
1 试验数据
本文研究区域是位于加拿大安大略省惠特彻奇-史托维尔的一个小镇,该城镇中心区域的经纬度为(43°58′00″N,79°15′00″W)。本文的试验数据是由加拿大Optech公司的Titan机载多光谱LiDAR系统采集。Titan多光谱LiDAR系统包括3个不同波段的脉冲通道(532、1064和1550 nm波段),这3个激光脉冲通道在相同的震荡镜像上有3.5°偏转角的间隔,因此,该多光谱LiDAR系统可提供3个独立的激光点云。每个波段的平均点密度近似为每平方米3.6个点。
Optech Titan多光谱LiDAR系统总共采集了19条垂直交叉的航带数据,覆盖范围大约为25 km2。本研究从Titan多光谱LiDAR数据中裁剪一个面积为2052 m×1566 m的区域,作为本论文的试验数据。该研究区域内包含建筑物、道路、树木、草地、裸地和水体等丰富的地物类型。研究区数据包括上述3个波段下的独立点云数据集,1550 nm波段的三维点云数据(按照高程进行渲染)如图1所示。

图1 Titan多光谱LiDAR试验数据的三维立体显示(1550 nm,按照高程进行渲染)Fig.1 3D display of Titan multispectral LiDAR test data(1550 nm,render by elevation)
为了提高训练样本选取精度以及评价基于多光谱LiDAR数据的地物分类精度,根据研究区域的经纬度,从Google Earth上下载与研究区域对应的高分辨率遥感影像,如图2所示,辅助本文训练样本和精度评价参考数据集的选取。

图2 研究区域的Google Earth高分辨率影像Fig.2 High resolution Google Earth image in the study area
2 数据预处理
2.1 数据融合
Optech Titan多光谱LiDAR点云数据包含3个波段独立点云数据集。本文首先将这3个独立点云数据集合并成单一点云数据,其中每个激光点包含这3个波段的地物反射信息。具体地说,将这3个点云数据集中的任意一个波段的点云数据作为参照数据,遍历参考点云中的每个激光点,选取一定搜索范围,通过最近邻域搜索算法获取其他两个波段点云数据的强度值。根据点密度,设定其搜索范围为1 m。在选取的搜索范围内,对于参考激光点在其他两个波段中存在两种情况:①若有多个最邻近激光点,本文采用双线性内插方法获得参考激光点在其他波段的强度值;②若无多个最邻近激光点,本文将该波段的强度值设置为0。融合后的假彩色点云数据如图3所示。
2.2 数据插值
融合后的Optech Titan多光谱LiDAR数据是不规则的、海量的三维离散点云,如图1所示。为了快速、有效地对多光谱LiDAR数据进行地物分类,本文通过内插的方法将海量三维多光谱LiDAR数据根据其高程和多光谱信息转换为距离和多光谱影像。结合LiDAR数据的特点,采用距离加权平均法插值理论[22],生成距离和多光谱影像,根据每个波段平均点密度3.6个/平方米,二维影像的分辨率设置为0.5 m。
图4(a)—(c)所示分别为上述3个单独波段的强度影像, 图4(d)为融合激光点云的距离影像(或称高程影像),图4(e)为融合后的多光谱影像。
3 多光谱LiDAR点云地物分类
20世纪90年代,Vapnik研究团队提出支持向量机分类(SVM)方法[23]。该理论是建立在统计学习理论基础上的机器学习方法。SVM可以自动寻找出那些对分类有较好区分能力的支持向量,由此构造出的分类器可以最大化类与类的间隔,因而有较好的适应能力和较高的分类准确率,同时该方法只需要由各类域的边界样本的类别来决定最后的分类结果。SVM分类方法的目的在于寻找一个超平面。该超平面可以将训练集中的数据分开,且与类域边界的沿垂直于该超平面方向的距离最大。
SVM适用于小样本的分类问题,可以很好地处理LiDAR数据中己知样本较少的情况。另外,其特征向量构造方法简单,算法运行速度较快,可以有效地进行维度较高数据的线性分类。因此,SVM在LiDAR数据地物分类领域得到了广泛的应用。本文利用SVM算法进行多光谱LiDAR数据的地物覆盖分类研究。
3.1 特征提取
3.1.1 光谱特征
Optech Titan机载多光谱LiDAR系统采用如图5所示的532 nm(可见光绿波段)、1064 nm(近红外)和1550 nm (中红外)3个波段激光束进行数据采集。水体、植被和裸地3个地物的地物波谱曲线如图5所示,发现这些地物在3个特定的波段内反射能量有所差异,可区分性较明显。因此,可根据不同地物在Titan多光谱LiDAR数据的波谱特征进行地物分类。
从图5可以看出:
(1) 在1064 nm近红外波段处,植被反射率强;但是在可见光532 nm的绿色波段处,其反射率较低。
(2) 在1064 nm和1550 nm波段处,裸地和植被易于区别。
(3) 在532 nm波段处,可以很好地分辨水体。
为了描述多光谱LiDAR数据的光谱特征,将这3个独立波段数据组成光谱特征向量记为XB=[B1,B2,B3]T。

图3 融合后含有3个波段信息的单一点云数据的三维点云显示图(532、1064和1550 nm 3个波段合成的假彩色点云数据)Fig.3 3D point cloud display of single point cloud data with three wave lengths intensity information fusion pseudo-color rendered point data of 532,1064 and 1550 nm)
3.1.2 多光谱LiDAR的植被指数
从Optech Titan LiDAR系统的3个独立波段信息,可计算相应植被指数,将其作为地物分类的特征信息。其具体表达见式(1)—(3)
GDVI=NIR-GREEN
(1)
GNDVI=(NIR-GREEN)/(NIR+GREEN)
(2)
GRVI=NIR/GREEN
(3)
式(1)中GDVI(green difference vegetation index)是绿色差值植被指数[25],该指数最初是用来从彩色与红外影像中预测谷物的氮含量。式(2)中GNDVI(green normalized difference vegetation index)是绿色归一化差值植被指数[26]。

图4 插值结果Fig.4 Interpolation results

图5 Optech Titan LiDAR系统4个波段,以及水体、植被和裸地地物波谱曲线[24]Fig.5 Three wave lengths of an Optech Titan LiDAR system and spectral curves of three object samples (e.g. soil,water,vegetation)
由于GNDVI是利用540 nm到570 nm的绿色波段来代替NDVI(normalized difference vegetation index)中的红色波段,因而GNDVI对叶绿素浓度更敏感。式(3)中GRVI(green ratio vegetation index)是绿色比值植被指数[25],该指数对森林冠层光合作用速率较为敏感。相应的GDVI、GNDVI和GRVI植被指数分别如图6(a)—(c)所示。这里将GDVI、GNDVI和GRVI组成多光谱LiDAR植被指数特征向量,记为XI=[I1,I2,I3]T。
3.1.3 多光谱纹理特征
纹理是特定图像范围内(或地物类)像素之间关系的度量,利用纹理特征可以很好地描述像素的空间关系和结构。提取纹理特征的一种有效方法就是以灰度级的空间相关矩阵即共生矩阵为基础。从灰度共生矩阵可导出一些反映图像特征的参数:中值、协方差、同质性、反差、差异性、熵、二阶距、自相关等。

图6 多光谱LiDAR数据的植被指数Fig.6 Multispectral LiDAR-based vegetation index
对Titan试验数据中的3个独立波段的强度影像,采用灰度共生矩阵生成纹理特征,其窗口大小为3×3。通过多次试验,本论文分别选择了3个波段的熵与自相关纹理特征,如图7(a)—(f)所示,将其纹理特征向量记为XT=[T1,T2,T3,T4,T5,T6]T。
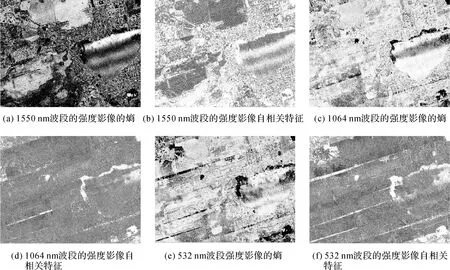
图7 纹理特征Fig.7 Texture features
3.1.4 高程特征
LiDAR数据的高程数据中包含着物体的垂直结构信息,有助于区分地物,比如人造物体的建筑物与道路,草地与树木。内插后的距离影像每个像素值代表着该点的高程信息,因此,可将距离影像中灰度值信息作为特征向量E1(图4(d))。类似强度影像,利用内插后的距离影像数据也可以通过灰度共生矩阵生成熵与自相关分类特征,如图8(a)—(b)所示。结合高度灰度值信息,其高程特征向量记为XE=[E1,E2,E3]T。

图8 高程特征Fig.8 Elevation features
结合多光谱LiDAR数据的光谱特征向量XB、植被指数向量XI、纹理特征向量XT以及高程特征向量XE,构成总向量X=[XB,XI,XT,XE],作为多光谱LiDAR数据的分类特征向量输入到SVM分类器实现地物分类。根据研究区域特点,本文将Optech多光谱LiDAR数据分类为建筑物、道路、树木、草地、裸地和水体六类地物类型。训练样本与参考数据在Google Earth高分辨率影像辅助下,人工从Titan多光谱LiDAR试验数据集获取。
4 试验与分析
4.1 基于单波段和多光谱LiDAR数据的地物分类
不同波段的强度影像,其传输特性、目标回波的后向散射特性等都是不同的,理论上多波段数据具有比单波段更丰富、更可靠、更有用的信息。本论文对Optech Titan试验数据中包含的3个单波段影像以及多光谱LiDAR数据进行地物分类,分析其分类结果。
SVM有两个关键参数:惩罚系数和核函数。本次试验中,SVM的核函数设置为径向基核函数,惩罚系数设置为100。在此参数下,本节设计了5个比较试验,见表1:
5个试验结果分别如图9(a)—(e)所示。根据Google Earth高分辨率影像(图2)发现:该6类地物分类结果在单个波段LiDAR数据差距较大。例如:在1550 nm波段数据中,道路可以很好地区分出来,但无法正确识别裸地;在1064 nm波段数据中,无法将建筑物和树木正确区别,也很难区别裸地和道路;在532 nm波段数据中,无法正确区别建筑物和树木,也无法正确区别裸地和道路。总之,基于单波段的LiDAR数据的分类结果难以令人满意。

表1 基于单波段和多光谱LiDAR数据的地物分类的比较试验
然而,与单波段的LiDAR数据分类结果相比,多光谱LiDAR数据分类精度明显提高。如图9(d)所示,在单波段LiDAR数据中无法区分的目标类别(例如:1064 nm和532 nm波段数据中无法识别的水体)在多光谱LiDAR数据分类结果中能够正确识别。
为了进一步来验证单波段LiDAR数据与多光谱LiDAR数据分类结果,利用误差矩阵计算的总体精度、Kappa系数以及每组试验数据的生产者精度和用户精度来进行定量分析。本次5个试验的分类精度对比表以及生产者精度和用户精度对比表分别见表2和表3。
根据表2发现:相较于单波段LiDAR数据的分类精度,多光谱LiDAR数据分类精度明显提高,其中总体精度提高了4.6%~25.2%,Kappa系数提高了0.086~0.333。根据表3(a)—(c)表格可发现单波段LiDAR数据对裸地的识别能力太差,同时表3(d)—(e)表格说明多光谱LiDAR数据能够较好地识别单波段数据中不能识别的地物。
表2单波段和多光谱LiDAR数据的地物分类精度对比表
Tab.2Comparisonofland-coverclassificationaccuracyofsingle-wavelengthandmulti-spectralLiDARdata

试验总体精度(%)Kappa系数试验137.180.208试验246.900.363试验357.750.455试验462.320.541试验572.220.665
在多光谱LiDAR数据试验4分类基础上,在试验5中分类特征增加了多光谱LiDAR植被指数(XI)、多光谱纹理特征(XT)以及高程特征(E2,E3),其分类精度较试验4有了明显提高。
总之,本次对比试验结果表明多光谱LiDAR数据可以结合各波段的优势和互补信息,从而比基于单波段LiDRA数据的地物分类获取更高的分类精度。同时,多光谱LiDAR植被指数特征和纹理特征也可以进一步提高分类精度,优化分类结果。
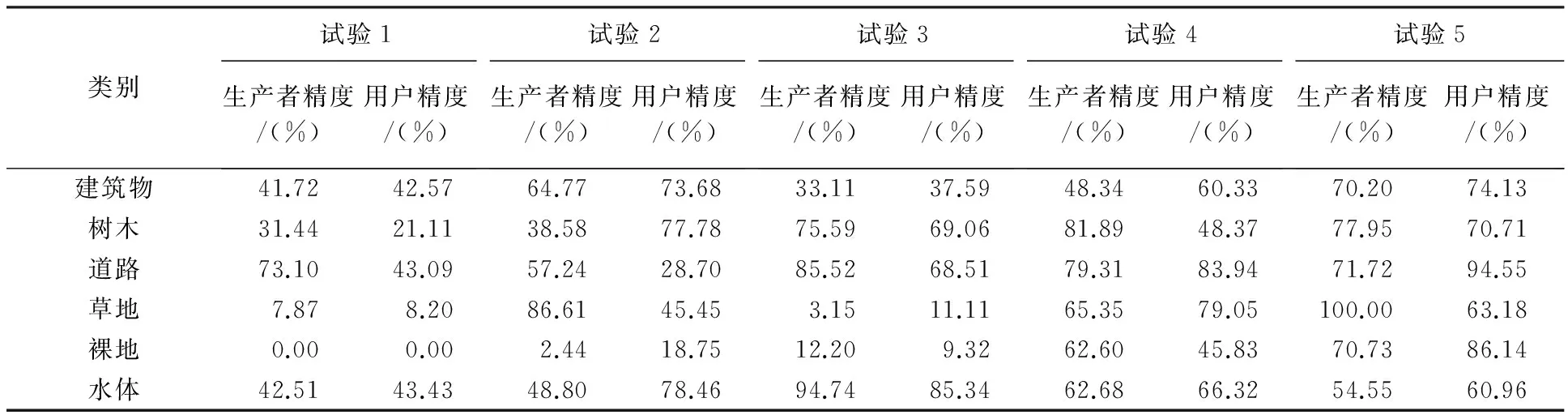
表3 单波段和多光谱LiDAR数据的生产者精度和用户精度对比表
4.2 对比试验
文献[27]指出SVM分类方法的线性判别分类器理论与实际结合较好,它是一种基于小样本的学习方式。从本质上看,它避开了从归纳到演绎的传统过程,实现了高效地从训练样本到预报样本的“转导推理”,大大简化了通常的分类问题。本节通过与常见的4种分类方法(最小距离、最大似然、神经网络、随机森林)对比,来评价SVM分类方法在多光谱LiDAR数据地物分类的适用性。
参与对比试验分类方法参数设置为:最小距离分类法—(最小距离:4像素);最大似然分类法—(正态分布的概率密度函数);采用神经网络分类法—(活化函数:对数函数,训练次数:1000);SVM分类法—(核函数:径向基核函数,惩罚系数:100);随机森林分类法—(决策树个数:50)。前4种分类的试验结果如图10(a)—(d)所示,SVM分类结果如图9(d)所示。
从图10(a)—(c)可以看出:最小距离、最大似然和神经网络这3种分类方法对多光谱LiDAR数据的水体识别能力极差;最小距离(图10(a))和极大似然(图10(b))对裸地的分类效果较差;神经网络(图10(c))对树木和草地的区分能力较差;随机森林分类(图10(d))对道路和裸地的区分能力较差;SVM(图9(d))则难以区分裸地和建筑物。可见,最小距离、最大似然、神经网络、随机森林以及SVM这5种分类方法,在多光谱LiDAR数据地物分类上各有各的缺陷。比较随机森林(图10(d))与SVM(图9(d)),发现这两种分类方法的分类结果较为相似,地物区分能力较其余3种分类有明显的优势。但是随机森林算法较为复杂,算法的实现花费时间较长,为2 548.83 s(大致为42 min),SVM花费761 s(大致12 min)(算法都是运行在HP EliteDesk 880 G2 TWR计算机上,其内核为 Intel®CoreTMi5-6500 CPU 3.20 GHz)。因此,对于Optech Titan多光谱LiDAR数据,SVM算法效率要优于随机森林算法。
为了进一步验证这5种分类方法对多光谱LiDAR数据地物分类精度,本文通过总体精度和Kappa系数对他们分类结果进行定量分析。本次对比试验的分类精度对比见表4。
表4基于Titan多光谱LiDAR数据的地物分类精度对比表
Tab.4Comparisonofland-coverclassificationaccuracybasedonTitanmultispectralLiDARdata

分类方法总体精度(%)Kappa系数最小距离51.130.415最大似然53.060.436神经网络60.200.521随机森林55.290.452SVM62.320.541
根据表4发现:最小距离分类精度最低,SVM的分类精度最高。SVM总体分类精度比其他4个分类方法提高了大约2.1%~11.2%,Kappa系数则提高了大约0.020~0.126。
定性与定量试验结果表明:相较于最小距离、最大似然、神经网络和随机森林,SVM可获得较高的分类精度。主要原因在于SVM算法可在小样本数据量下具有自动寻找对分类有较好区分能力,因而能够提高多光谱LiDAR数据的分类精度。
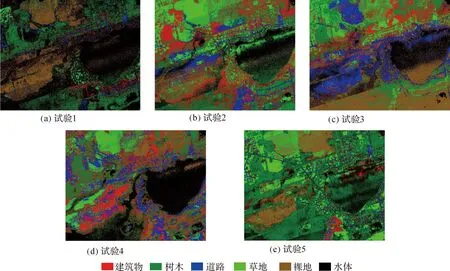
图9 基于单波段和多光谱LiDAR数据的地物分类结果图Fig.9 Comparison of land-cover classification results by using single-wavelength and multi-spectral LiDAR data

图10 4种分类算法分类结果图Fig.10 Classification results of comparative trials
4.3 SVM参数敏感性分析
SVM中有两个关键参数:核函数和惩罚系数,该参数的大小很大程度上决定了分类精度。因此,基于多光谱LiDAR数据进行核函数以及惩罚系数两个参数敏感性试验。
4.3.1 最优核函数
SVM一般有线性核函数、多项式核函数、径向基核函数和感知核函数4种核函数。为了进行合理的精度分析,所有核函数均采用默认参数(惩罚系数都设置为100)。在给定的相同训练样本的情况下,对多光谱LiDAR数据进行地物分类的比较试验。基于多光谱LiDAR数据的SVM 4个核函数分类精度对比见表5。
从表5中可发现:在利用SVM分类方法进行多光谱LiDAR数据地物分类时,径向基核函数获得的总体精度和Kappa系数最高。因此,针对本文多光谱LiDAR数据,径向基核函数是SVM分类的最优核函数。
表5基于4种核函数的多光谱进行地物分类精度对比表
Tab.5ComparisonofSVMland-coverclassificationaccuracybasedonfourkindsofSVMkernelfunctions

核函数类型总体精度/(%)Kappa系数线性核函数(liner)71.540.657多项式核函数(polynomial)69.040.628径向基核函数(radialbasisfunction)72.220.665感知核函数(sigmoid)65.300.582
4.3.2 惩罚系数
根据4.3.1节试验选用径向基核函数为SVM分类算法的核函数。在径向基核函数中,惩罚系数对分类精度也有着很大的影响。本节针对本文多光谱LiDAR数据,确定径向基核函数的惩罚系数最佳值。
本试验将惩罚系数从50到400逐渐变化进行参数敏感性测试。多光谱LiDAR数据分类精度的试验结果如图11所示。
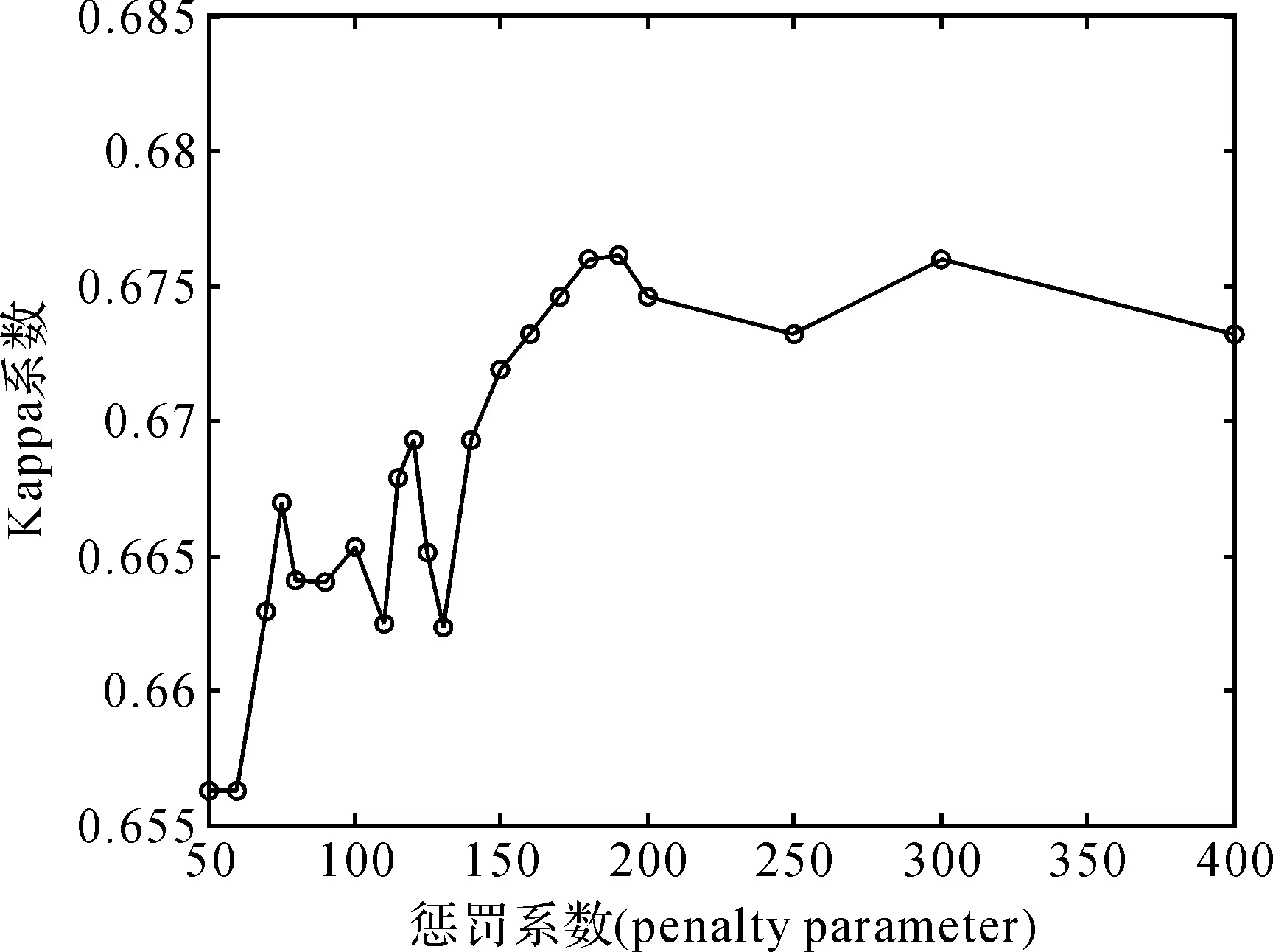
图11 惩罚系数对多光谱LiDAR数据分类精度影响Fig.11 Influence of penalty parameter on SVM classification accuracy
根据图11试验结果可发现:当惩罚系数在50~200区间,多光谱LiDAR数据分类精度随着惩罚系数的变化波动较大,然而随着惩罚系数继续增加,多光谱LiDAR数据分类精度趋于稳定。从参数敏感性试验可以看出当惩罚系数为190左右时,本文多光谱LiDAR数据可获得最佳的分类精度。
5 结 论
本文利用加拿大Optech公司Titan多光谱LiDAR数据,提出了基于支持向量机(SVM)的地物分类研究,将研究区地物分类为建筑物、道路、树木、草地、裸地和水体6个类别。研究发现:①将多光谱LiDAR的多个波段三维点云数据融合为包含多光谱信息的单一点云数据,也就是说该数据集合中每个激光点包含多光谱信息,这样在增加点云数据光谱信息同时可以减少点云数据处理复杂度;②将离散的多光谱点云数据转换成二维多光谱和距离影像数据,有助于减小处理数据的复杂性,利用成熟的图像分类技术,可提高基于多光谱LiDAR数据的地物分类效率;③通过分析Titan 试验数据发现,利用多光谱LiDAR点云数据的地物分类精度要高于传统的单一波段点云数据地物分类精度;④通过与最小距离、最大似然、神经网络和随机森林分类方法对比,SVM对多光谱LiDAR点云数据的地物分类精度最高,其总体精度提高了2.1%~11.2%,Kappa系数提高了0.020~0.126;⑤通过对SVM参数敏感性分析可知,最优核函数为径向基核函数,其惩罚系数在190左右时,SVM可获得较高的分类精度。笔者进一步研究从多个分类特征自动选择算法,运用深度学习抽取高层次分类特征,提高分类精度等方面展开,提高多光谱LiDAR数据的目标判读和解译精度。
[1] 张继贤, 林祥国, 梁欣廉. 点云信息提取研究进展和展望[J]. 测绘学报, 2017, 46(10): 1460-1469. DOI: 10.11947/j.AGCS.2017.20170345.
ZHANG Jixian, LIN Xiangguo, LIANG Xinlian. Advances and Prospects of Information Extraction from Point Clouds[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(10): 1460-1469. DOI: 10.11947/j.AGCS.2017.20170345.
[2] 高广, 马洪超, 张良, 等. 顾及地形断裂线的LiDAR点云滤波方法研究[J]. 武汉大学学报(信息科学版), 2015, 40(4): 474-478.
GAO Guang, MA Hongchao, ZHANG Liang, et al. A Ground Filtering Algorithm for Airborne LiDAR in Consideration of Terrain Break Lines[J]. Geomatics and Information Science of Wuhan University, 2015, 40(4): 474-478.
[3] 张齐勇, 岑敏仪, 周国清, 等. 城区LiDAR点云数据的树木提取[J]. 测绘学报, 2009, 38(4): 330-335. DOI: 10.3321/j.issn:1001-1595.2009.04.008.
ZHANG Qiyong, CEN Minyi, ZHOU Guoqing, et al. Extracting Trees from LiDAR Data in Urban Region[J]. Acta Geodaetica et Cartographica Sinica, 2009, 38(4): 330-335. DOI: 10.3321/j.issn:1001-1595.2009.04.008.
[4] AZADBAKHT M, FRASER C S, KHOSHELHAM K. Improved Urban Scene Classification Using Full-Waveform LiDAR[J]. Photogrammetric Engineering & Remote Sensing, 2016, 82(12): 973-980.
[5] DONG Weihua, LAN Jianhang, LIANG Shunlin, et al. Selection of LiDAR Geometric Features with Adaptive Neighborhood Size for Urban Land Cover Classification[J]. International Journal of Applied Earth Observation and Geoinformation, 2017, 60: 99-110.
[6] SHIROWZHAN S, TRINDER J. Building Classification from LiDAR Data for Spatio-temporal Assessment of 3D Urban Developments[J]. Procedia Engineering, 2017, 180: 1453-1461.
[7] 李振玉. 基于激光雷达波形和点云数据的建筑物与树木的分类[J]. 黑龙江科技信息, 2015(29): 24.
LI Zhenyu. Classification of Buildings and Trees Based on LiDAR Waveform and Point Cloud Data[J]. Heilongjiang Science and Technology Information, 2015(29): 24.
[8] 吴杭彬. 融合航空影像的机载激光扫描数据分类与特征提取[J]. 测绘学报, 2011, 40(1): 134.
WU Hangbin. Classification and Feature Extraction of Airborne LiDAR Data Fused with Aerial Image[J]. Acta Geodaetica et Cartographica Sinica, 2011, 40(1): 134.
[9] WANG Hongzhou, GLENNIE C. Fusion of Waveform LiDAR Data and Hyperspectral Imagery for Land Cover Classification[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 108: 1-11.
[10] 刘丽娟, 庞勇, 范文义, 等. 机载LiDAR和高光谱融合实现温带天然林树种识别[J]. 遥感学报, 2013, 17(3): 679-695.
LIU Lijuan, PANG Yong, FANG Wenyi, et al. Fused Airborne LiDAR and Hyperspectral Data for Tree Species Identification in A Natural Temperate Forest[J]. Journal of Remote Sensing, 2013, 17(3): 679-695.
[11] 高利鹏, 史文中, 吕志勇, 等. 基于机载LiDAR和高分辨率遥感影像的城市道路网提取[J]. 遥感技术与应用, 2013, 28(4): 562-568.
GAO Lipeng, SHI Wenzhong, LV Zhiyong, et al. Road Network Extraction Based on Airborne LiDAR and High Resolution Remote Sensing Imagery[J]. Remote Sensing Technology and Application, 2013, 28(4): 562-568.
[12] HAMEDIANFAR A, SHAFRI H Z M, MANSOR S, et al. Improving Detailed Rule-based Feature Extraction of Urban Areas from WorldView-2 Image and LiDAR Data[J]. International Journal of Remote Sensing, 2014, 35(5): 1876-1899.
[13] PARIS C, BRUZZONE L. A Three-dimensional Model-based Approach to the Estimation of the Tree Top Height by Fusing Low-density LiDAR Data and Very High Resolution Optical Images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(1): 467-480.
[14] SWATANTRAN A, DUBAYAH R, ROBERTS D, et al. Mapping Biomass and Stress in the Sierra Nevada Using LiDAR and Hyperspectral Data Fusion[J]. Remote Sensing of Environment, 2011, 115(11): 2917-2930.
[15] 许传阳, 李建红. 高分辨率遥感影像结合LiDAR数据的面向对象分类方法[J]. 河南理工大学学报(自然科学版), 2015, 34(2): 222-225.
XU Chuanyang, LI Jianhong. Object-oriented Classification with High Resolution Image and LiDAR Data[J]. Journal of Henan Polytechnic University (Natural Science), 2015, 34(2): 222-225.
[16] WANG Chengkai, TSENG Y H, CHU H J. Airborne Dual-wavelength LiDAR Data for Classifying Land Cover[J]. Remote Sensing, 2014, 6(1): 700-715.
[17] WALLACE A M, MCCARTHY A, NICHOL C J, et al. Design and Evaluation of Multispectral LiDAR for the Recovery of Arboreal Parameters[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(8): 4942-4954.
[18] WALLACE A, NICHOL C, WOODHOUSE I. Recovery of Forest Canopy Parameters by Inversion of Multispectral LiDAR Data[J]. Remote Sensing, 2012, 4(2): 509-531.
[19] GONG Wei, SUN Jia, SHI Shuo, et al. Investigating the Potential of Using the Spatial and Spectral Information of Multispectral LiDAR for Object Classification[J]. Sensors, 2015, 15(9): 21989-22002.
[20] VAUHKONEN J, HAKALA T, SUOMALAINEN J, et al. Classification of Spruce and Pine Trees Using Active Hyperspectral LiDAR[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(5): 1138-1141.
[21] PUTTONEN E, HAKALA T, NEVALAINEN O, et al. Artificial Target Detection with a Hyperspectral LiDAR Over 26-h Measurement[J]. Optical Engineering, 2015, 54(1): 013105.
[22] 李新, 程国栋, 卢玲. 空间内插方法比较[J]. 地球科学进展, 2000, 15(3): 260-265.
LI Xin, CHENG Guodong, LU Ling. Comparison of Spatial Interpolation Methods[J]. Advance in Earth Sciences, 2000, 15(3): 260-265.
[23] 郑红军, 周旭, 毕笃彦. 统计学习理论及支持向量机概述[J]. 现代电子技术, 2003(4): 59-61.
ZHENG Hongjun, ZHOU Xu, BI Duyan. Introduction Statistical Learning Theory and Support Vector Machines[J]. Modern Electronic Technique, 2003(4): 59-61.
[24] 施健, 柳钦火, 闻建光, 等. 面向电子政务的全国典型地物波谱数据服务平台设计与实现[J]. 遥感技术与应用, 2011, 26(4): 520-526.
SHI Jian, LIU Qinhuo, WEN Jianguang, et al. Design and Realization of the Service Platform for Typical Ground Objects Spectrum Data in China Based on E-government[J]. Remote Sensing Technology and Application, 2011, 26(4): 520-526.
[25] SRIPADA R P, HEINIGER R W, WHITE J G, et al. Aerial Color Infrared Photography for Determining Early In-Season Nitrogen Requirements in Corn[J]. Agronomy Journal, 2005, 98(4): 968-977.
[26] GITELSON A A, MERZLYAK M N. Remote Sensing of Chlorophyll Concentration in Higher Plant Leaves[J]. Advances in Space Research, 1998, 22(5): 689-692.
[27] 杨凯歌, 冯学智, 肖鹏峰, 等. 优化子空间SVM集成的高光谱图像分类[J]. 遥感学报, 2016, 20(3): 409-419.
YANG Kaige, FENG Xuezhi, XIAO Pengfeng, et al. Optimal Subspace Ensemble with SVM for Hyperspectral Image Classification[J]. Journal of Remote Sensing, 2016, 20(3): 409-419.
[28] 李清泉, 李必军, 陈静. 激光雷达测量技术及其应用研究[J]. 武汉测绘科技大学学报, 2000, 25(5): 387-392.
LI Qingquan, LI Bijun, CHEN Jing. Research on Laser Range Scanning and Its Application[J]. Journal of Wuhan Technical University of Surveying and Mapping, 2000, 25(5): 387-392.
猜你喜欢
ELLE世界时装之苑(2024年5期)2024-05-14 09:45:39
北京航空航天大学学报(2022年8期)2022-08-31 08:58:58
电子制作(2018年11期)2018-08-04 03:25:38
高师理科学刊(2016年8期)2016-06-15 20:27:45
测绘科学与工程(2016年5期)2016-04-17 06:51:15
中国光学(2015年5期)2015-12-09 09:00:28
西藏科技(2015年4期)2015-09-26 12:12:58
电子设计工程(2015年3期)2015-02-27 12:03:45
食品工业科技(2014年23期)2014-03-11 18:18:54
无机化学学报(2014年1期)2014-02-28 17:30:08
