
GPS/BDS组合的精密单点定位算法实现
2018-03-06 12:36:25王趁香徐爱功葛茂荣祝会忠
导航定位学报 2018年1期
王趁香,徐爱功,葛茂荣,祝会忠,高 猛
(1.辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000;2.德国GFZ地学研究中心,Potsdam A1714473,德国)
0 引言
全球卫星导航系统(global navigation satellite system,GNSS)已经在各行各业中得到了广泛的应用,精密单点定位技术(precise point positioning,PPP)是指利用载波相位观测值以及利用国际GNSS服务组织(International GNSS Service,IGS)提供的精密星历和精密卫星钟差产品,采用有效的参数估计方法和精细的误差改正模型直接获得载体在国际地球参考框架(international terrestrial reference frame,ITRF)下的绝对坐标的方法。文献[1]提到全球有影响力的国家或集团纷纷构建自己的GNSS,逐渐形成多GNSS格局,美国的全球定位系统(global positioning system,GPS)经过20多年的研究和实验,于1994-03完成了24颗卫星在轨的完整系统网络,实现全球98 %地区的覆盖。文献[2]提到截至2016-06,中国自主开发的北斗卫星导航系统(BeiDou navigation satellite system,BDS)由7颗地球静止轨道(geostationary Earth orbit,GEO)卫星、8颗倾斜地球同步轨道(inclined Earth geosynchronous satellite orbit,IGSO)卫星和7颗中高度地球轨道(medium altitude Earth orbit,MEO)卫星(其中1颗为测试卫星)组成,目前已实现了区域导航能力。文献[3]提到随着各国导航系统的建立,多卫星导航系统组合导航定位成为了必然趋势,多卫星导航系统组合PPP不仅增加了可见卫星数,同时改善了卫星几何强度,在误差处理方面提供了更多的观测数据,为实现PPP模糊度快速固定与高精度定位创造了条件。文献[4-5]指出国内外许多学者对组合导航定位进行了研究,研究表明在中国区域内的GPS/BDS和GPS/GLONASS组合系统的覆盖性能力相比于GPS、BDS和GLONASS单系统更优。然而对3系统组合精密单点定位的理论研究并不完善,此方向也成为今后GNSS多系统融合精密单点定位算法的研究趋势。目前,精密单点定位存在着解算模型中参数较多、定位收敛时间长、定位精度相比差分定位要差等问题,如何利用多卫星导航系统组合进行精密单点定位,解决精密单点定位中存在的定位精度及收敛时间问题,提高定位的精度,缩短定位的收敛时间,成为相关研究的重点。经过各国多年的研究,PPP定位精度逐渐提高。文献[6]提出在测码伪距与测码伪距观测值间、载波相位与载波相位观测值间分别形成双频消电离层组合的PPP模型,获得了厘米级的定位精度。文献[7]提出了非差精密单点定位方法,处理长时间静态观测数据的结果精度达到厘米级。
本文借鉴GPS PPP的算法与数学模型,以GPS和BDS单系统高精度导航定位的发展与应用为基础,进行GPS/BDS组合PPP算法与定位精度方面的研究。
1 数学模型和数据处理策略
1.1 时间与空间基准的统一
BDS的时间基准采用北斗时(BDS time,BDT)。BDT的起算时刻为UTC 2006-01-01 T 00:00:00,秒长为原子时秒长,采用星期(周)和秒计数,GPS时是GPS采用的时间系统,GPS时(GPS time,GPST)的起算时刻为世界时(universal time cood,UTC)1980-01-06 T 00:00:00,在起始时刻GPST与UTC严格对齐,GPS时与国际原子时(international atomic time,TAI)相差19 s,通过将UTC(NTSC)与国际UTC建立联系,BDT与UTC之间的偏差保持在100 ns以内[5]。GPST与BDT相差604 814 s,转换关系为
GPST=BDT+604 814。
(1)
2000国家大地坐标系(China geodetic coordinate system 2000,CGCS2000)被我国BDS所采用,CGCS2000坐标系的原点定义在包括海洋和大气在内的整个地球的质量中心,空间尺度同地心局部框架的地心坐标时(geocentric coordinate time,TCG)时间坐标一致,单位为m,定向由国际时间局(International Time Bureau,BIH)1984.0定向给定,并且其时间演变由整个地球上水平构造运动无净旋转条件保证[8-9]。CGCS2000坐标系是右手地固直角坐标系:原点在地球的质心;Z轴指向国际地球自转服务组织(International Earth Rotation Service,IERS)发布的参考极方向;X轴为IERS参考子午面与通过原点且同Z轴正交的赤道面的交线;Y轴垂直于ZOX平面构成右手坐标系[10-11]。CGCS2000坐标系的参考椭球是一个旋转椭球,其几何中心与坐标系的原点重合,旋转轴与坐标系的Z轴一致[12]。WGS-84坐标系(world geodetic system-1984 coordinate system,WGS-84)为GPS所采用,与CGCS2000坐标系在定义上是一致的,其中坐标原点、空间尺度、定向及其演变都是相同的,采用的参考椭球也是非常相近的[13-18]。
1.2 数学模型
GSP/BDS组合采用L1、L2频率上的相位和伪距观测值进行无电离层组合的观测值来消除电离层延迟一阶项的影响,基本观测方程[14]为
(2)
式中:上标G、B代表GPS系统和BDS系统;i为频率;Li为各载波相位观测值;P为伪距观测值;ρ为信号发射时刻的卫星位置到信号接收时刻接收机位置之间的几何距离;c为真空中的光速,c=2.997 924 58×108m/s;λi为相应频率的波长;δT为接收机钟差;δt为卫星钟差;T为对流层延迟误差;Ii为Li各载波相位的电离层延迟引起的距离误差;dmul为多路径效应引起的误差;dtide为海潮等的潮波引起的误差;drel为相对论效应引起的误差;Ni为对应频率相位观测值的整周模糊度;εL为载波相位的观测噪声以及未被模型化的各项误差的影响;εp为伪距观测噪声以及未被模型化的各项误差的影响。
1.3 数据处理策略
实验中主要对与卫星有关的误差(卫星钟差、卫星天线相位中心偏差、相位缠绕等)、与接收机有关的误差(接收机钟差、接收机天线相位中心偏差、地球固体潮等)、与信号传播有关的误差(对流层延迟误差、电离层延迟误差、多路径效应等)3类误差通过模型改正以达到理想的误差处理效果,如天线相位偏差的影响利用参数所建立的改正模型消除,对流层延迟采用Sassatamoinen+随机游走模型减弱,电离层延迟通过双频消电离层组合模型消除[15-19]。实验采用的截止高度角为7°,卫星轨道和卫星钟差均采用国际GNSS服务组织IGS提供的采样间隔为30 s的精密轨道和30 s的精密钟差,静态PPP 实验时测站坐标当常参数估计,在动态PPP数据处理时增加测站速率约束条件,对于截止高度角、相位缠绕改正模型、固体潮汐改正模型、相对论效应改正模型与静态PPP相同,具体的PPP数据处理策略如表1所示。
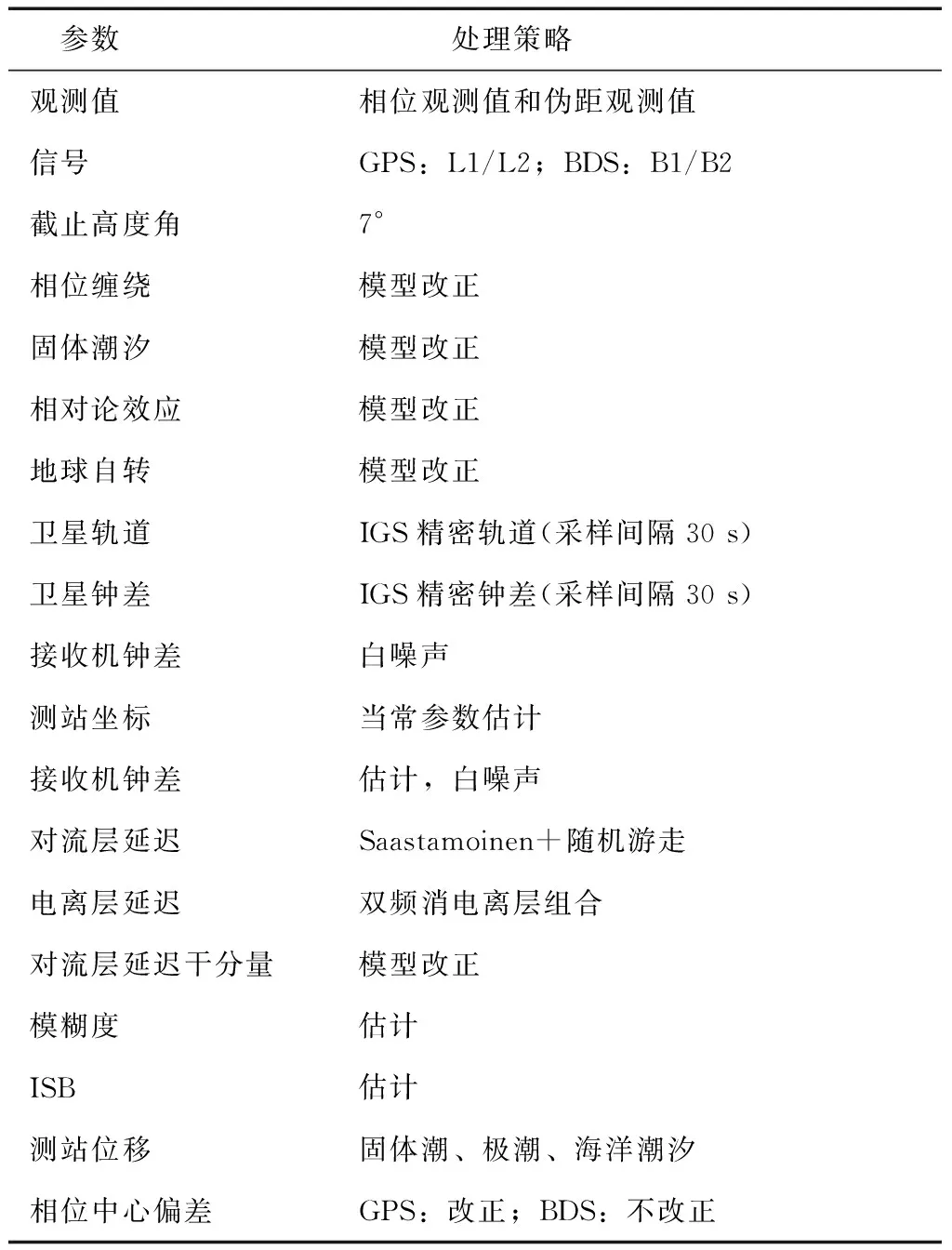
表1 PPP数据处理策略
在数据预处理过程中,本文实验在参数估计时采用间接平差法,平差后易于求得待求量的最佳估计及精度信息,若L为观测值,B为系数矩阵且为满秩矩阵,d为改正数,X0为初始值,D为近似改正数,P为参数矩阵,则具体步骤如下:
(3)
式中:
令观测值的近似值为l0,有l=L-(BX0+D)=L-l0;
(4)
(5)
利用数学上求极值的方法对V求极值,即VTPV=min,有BTPV=0;
(6)
联立方程解得到参数的估计值
(7)
得到待估参数的值即最终的平差结果
(8)
2 实验与结果分析
实验采用MIZU、PBRI、SHAO、SMST、AIRA、BJFS、CHAN观测站上多模接收机同步接收的GPS和BDS 2016-10-03—2016-10-05 3 d的观测数据进行GPS、BDS、GPS/BDS组合3种模式下不同计算时长(2、6、12、24 h)的静态以及动态PPP实验。观测站MIZU、PBRI、SHAO、SMST、AIRA、BJFS、CHAN的经度、纬度以及天线类型如表2所示。为了分析定位精度,以IGS中心发布的第1 917个星期的测站坐标作为参考值。所选测站的观测数据采样间隔为30 s,精密产品采用IGS提供的GPS 30 s精密星历和30 s精密钟差产品,使用IGS提供的ANTEX文件改正GPS卫星端和接收机端天线相位中心偏移和天线相位中心变化。

表2 测站相关信息
以MIZU为例,计算时长为2 h,3 d的观测数据共36个观测历元;计算时长为6 h,3 d的观测数据为12个观测历元;计算时长为12 h,3 d的观测数据共6个历元;计算时长为24 h,3 d的观测数据为3个观测历元。以IGS中心发布的第1 917个星期的测站坐标解作为参考值,分别计算出每个历元所获得的测站坐标在东(E)方向、北(N)方向和天(U)方向的定位误差。MIZU测站可见卫星数如图1所示。BDS可见卫星数有3~8颗,GPS可见卫星数有7~12颗,GPS/BDS组合系统可见卫星数有12~20颗,可见卫星数均能满足静态和动态PPP实验。MIZU测站位置精度衰减因子(position dilution of precision,PDOP)值的变化如图2所示,GPS/BDS组合系统的PDOP值小于GPS和BDS单系统的PDOP值,说明GPS/BDS组合系统的卫星结构优于单系统的卫星结构。
2.1 静态PPP实验
测站MIZU GPS、BDS和GPS/BDS组合3种模式下静态PPP实验结果如图3至图6所示。
计算分析时,首先将观测站MIZU 24 h的观测数据分为36个观测时段,即每个子时段2 h,3 d一共36个子时段,以IGS第1 917个星期的坐标作为参考值,分别计算出每个时段所获得的测站坐标在E、N和U方向的定位误差,BDS、GPS和GPS/BDS组合系统2 h的定位误差结果如图3所示。BDS在E和N2个方向的定位误差一般在5 cm左右,U方向误差在6 cm左右;GPS在E和N2个方向的定位误差一般在3.8 cm左右,U方向误差在5.5 cm左右;GPS/BDS组合在E和N2个方向的定位误差一般在3 cm左右,U方向误差在4.5 cm左右。
然后,将观测站MIZU 24 h的观测数据分为4个观测时段,即每个子时段6 h,3 d一共12个子时段,以IGS第1 917个星期的坐标解作为参考值,分别计算出每个时段所获得的测站坐标在E、N和U方向的定位误差,BDS、GPS和GPS/BDS组合系统6 h的定位误差结果如图4所示。BDS在E和N2个方向的定位误差一般在3 cm左右,U方向误差达到3.8 cm;GPS在E和N2个方向的定位误差一般在2 cm左右,U方向误差在3.5 cm左右;GPS/BDS组合在E和N2个方向的定位误差一般在1.8 cm左右,U方向误差为2.3 cm左右。
第三,将观测站MIZU 24 h的观测数据分为2个观测时段,即每个子时段12 h,3 d一共6个子时段,以IGS第1 917个星期的坐标解作为参考值,分别计算出每个时段所获得的测站坐标在E、N和U方向的定位误差,BDS、GPS和GPS/BDS组合系统12 h的定位误差结果如图5所示。BDS在E和N2个方向的定位误差一般在2.5 cm左右,个别误差达到3 cm,U方向误差一般在3 cm左右;GPS在E方向的定位误差一般在2 cm左右,N方向误差一般在1 cm左右,U方向误差达到3.5 cm;GPS/BDS组合在E方向的定位误差一般在1.8 cm左右,N方向的定位误差一般在0.8 cm左右,U方向误差为2 cm左右。
最后,将观测站MIZU 24 h的观测数据为1个观测时段,即每个子时段24 h,3 d一共3个子时段,以IGS第1 917个星期的坐标解作为参考值,分别计算出每个时段所获得的测站坐标在E、N和U方向的定位误差,BDS、GPS和GPS/BDS组合系统24 h的定位误差结果如图6所示。BDS 在E、N、U方向24 h的定位误差一般在2 cm左右,一小部分误差超过了2 cm;GPS 在E、N、U方向24 h的定位误差一般在1.5 cm左右,一部分误差超过了1.5 cm;GPS/BDS组合在E、N、U方向24 h定位误差一般为1 cm左右,个别超过1.5 cm。
实验所采用的7个测站数据进行静态PPP的均方根(root mean square,RMS)值如表3所示。

cm
2.2 动态PPP实验
以MIZU测站静态数据进行GPS、BDS和GPS/BDS组合3种模式下动态实验结果如图8至图10所示。
首先将观测站MIZU 24 h的观测数据分为36个观测时段,即每个子时段2 h,3 d一共36个子时段,以IGS第1 917个星期的坐标作为参考值,分别计算出每个时段所获得的测站坐标在E、N和U方向的定位误差,其结果如图7所示。BDS 在E、N、U3个方向2 h的定位误差一般在5.5 cm左右,一小部分误差超过了6 cm;GPS 在E、N、U3个方向2 h的定位误差一般在5 cm左右,一小部分误差超过了5.5 cm;GPS/BDS组合在E、N、U3个方向2 h定位误差一般为4.5 cm左右。
然后,将观测站MIZU 24 h的观测数据分为4个观测时段,即每个子时段6 h,3 d一共12个子时段,以IGS第1 917个星期的坐标解作为参考值,分别计算出每个时段所获得的测站坐标在E、N和U方向的定位误差,BDS、GPS和GPS/BDS组合系统6 h的定位误差结果如图8所示。BDS在E和N2个方向的定位误差一般在2.5 cm左右,个别误差达到3 cm,U方向误差一般在3 cm左右;GPS在E方向的定位误差一般在2 cm左右,N方向误差一般在1.5 cm左右,U方向误差一般在3.5 cm左右;GPS/BDS组合在E方向的定位误差一般在1.5 cm左右,N方向的定位误差一般在0.5 cm左右,U方向误差为2.3 cm左右。
第三,将观测站MIZU 24 h的观测数据分为2个观测时段,即每个子时段12 h,3 d一共6个子时段,以IGS第1 917个星期的坐标解作为参考值,分别计算出每个时段所获得的测站坐标在E、N和U方向的定位误差,BDS、GPS和GPS/BDS组合系统12 h的定位误差结果如图9所示。BDS在E和N2个方向的定位误差一般在2.5 cm左右,个别误差达到3 cm,U方向误差一般在3.5 cm左右;GPS在E方向的定位误差一般在2.3 cm左右,N方向误差一般在1 cm左右,U方向误差一般在3.5 cm左右;GPS/BDS组合在E方向的定位误差一般在2 cm左右,N方向的定位误差一般在0.8 cm左右,U方向误差为2.3 cm左右。
再者,将观测站MIZU 24 h的观测数据为1个观测时段,即每个子时段24 h,3 d一共3个子时段,以IGS第1 917个星期的坐标解作为参考值,分别计算出每个时段所获得的测站坐标在E、N和U方向的定位误差,BDS、GPS和GPS/BDS组合系统24 h的定位误差结果如图10所示。BDS在E、N、U方向的定位误差一般在2.5 cm左右,个别误差达到3 cm;GPS 在E方向的定位误差一般在2 cm左右,N方向误差一般在1.5 cm左右,U方向误差一般在3.5 cm左右;GPS/BDS组合在E方向的定位误差一般在1.5 cm左右,N方向的定位误差一般在0.8 cm左右,U方向误差为2 cm左右。
实验所采用的7个测站数据进行动态PPP的RMS值如表4所示。

表4 7个测站动态PPP RMS值 cm
3 结束语
通过自编软件对MIZU、PBRI、SHAO、SMST、AIRA、BJFS、CHAN 7个观测站2016-10-03—2016-10-05 3 d的实测数据进行静态以及动态PPP实验,从MIZU实验结果可以得出,GPS/BDS组合系统的静态以及动态PPP精度明显高于单系统定位精度。从表3和表4中统计的7个观测站RMS值中可以看出,GPS/BDS组合系统RMS值在E、N、U方向小于单系统。同时,通过实验可知GPS/BDS组合系统的可见卫星数多于GPS和BDS单系统的可见卫星数,由此可知,可见卫星数对不同系统的PPP精度会产生一定的影响,可见卫星数越多,定位精度相对越高。
本文采用静态数据模拟动态解算给出的精度指标要优于用实测动态数据定位解算给出的精度指标,并且所选测站大多在赤道附近以及所采用的测站比较少,观测时间也比较短,并且在数据处理的时候采用的高度角比较低,由此在同一时刻可以看到更多的卫星可数,这样更有利于数据观测;因此动态结果更好一些。武汉大学的张小红教授早在2006年采用精密单点定位技术就获得了几个厘米的动态定位精度。研究多测站动态数据下精密单点定位的精度问题是下一步研究的重点。
[1] 杨元喜,李金龙,徐君毅,等.中国北斗卫星导航系统对全球PNT用户的贡献[J].科学通报,2011,56(21):1734-1740.
[2] 黄令勇,吕志平,刘毅锟,等.三频BDS电离层延迟改正分析[J].测绘科学,2015,40(3):12-15.
[3] 徐杰,孟黎,仁超,等.对流层延迟改正中投影函数的研究[J].大地测量与地球动力学,2008,28(5):120-124.
[4] 金 彪.GPS/GLONASS /COMPASS 组合定向算法研究及程序实现[D].武汉:武汉大学,2012.
[5] 李建文.GPS/GLONASS 组合精密单点定位理论与方法[D].徐州:中国矿业大学,2008.
[6] 涂锐,黄观文,凌晴.GPS单频精密单点定位的研究实现[J].测绘科学,2011,36(3):68-72.
[7] 姜卫平,李昭,邱蕾.一种最新的经验投影函数GMF分析[J].大地测量与地球动力学,2009,29(5):85-89.
[8] 李征航,张小红.卫星导航定位新技术及高精度数据处理方法[M].武汉:武汉大学出版社,2009:23-24.
[9] 徐宗秋,徐爱功,高扬,等.对流层延迟参数与坐标参数的相关性研究[J].测绘通报,2013(1):25-28.
[10] 刘旭春,易武,张正禄,等.高精度GPS系统硬件延迟解算方法研究[J].宇航学报,2007,28(2):310-314.
[11] 涂锐,黄观文,凌晴.GPS单频精密单点定位的研究实现[J].测绘科学,2011,36(3):68-72.
[12] 吴波,吴瑞琰,党亚民,等.利用BDS/Galileo广播星历的位置及速度计算[J].导航定位学报,2016,4(3):51-54.
[13] 张小红,郭斐,李星星,等.GPS/GLONASS组合精密单点定位研究[J].武汉大学学报(信息科学版),2010,35(1):9-12.
[14] 臧楠.BDS/GNSS精密单点定位算法研究[D].西安:长安大学,2015.
[15] GRIFFITHS J,RAY J R.On the precision and accuracy of IGS orbits[J].Journal of Geodesy,2009,83(4):277-287.
[16] ZHAO Q.Initial results of precise orbit and clock determina-tion for COMPASS navigation satellite system[J].Journal of Geodesy,2013,26(1):1-12.
[17] XU A,XU Z,GE M R,et al.Estimating zenith tropospheric delays from BeiDou navigation satellite system observations[J].Sensors,2013,13(4):4514-4526.
[18] LI X X,GE M R,ZHANG H P,et al.A method for improving uncalibrated phase delay estimation and ambiguity-fixingin real-time precise point positiong[J].Journal of Geodesy,2013,87(5):405-416.
[19] XU Z,XU A,XU,X.Research on the correlation of troposphere delay parameters in GPS[J].Advances in Information Sciences and Service Sciences,2012,4(22):336-343.
猜你喜欢
舰船电子对抗(2022年6期)2022-12-25 12:41:40
地理空间信息(2022年11期)2022-11-26 05:47:02
科学导报(2022年39期)2022-07-04 23:15:46
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
山东冶金(2019年5期)2019-11-16 09:09:10
测绘学报(2018年10期)2018-10-26 06:12:16
城市勘测(2018年1期)2018-03-15 03:37:02
航空学报(2017年5期)2017-11-20 03:44:46
山东工业技术(2016年15期)2016-12-01 05:31:14
信息记录材料(2016年4期)2016-03-11 15:22:33
