
永磁直驱顶驱钻机转速精准控制的探讨
2018-03-05 05:26李超翁伟郭坤刘家荣
地质装备 2018年1期
李超,翁伟,郭坤,刘家荣
(北京探矿工程研究所,北京 100083)
0 引言
将永磁电机高效率,高功率因数的特点应用于直驱顶驱钻机,可大大减少顶驱钻机对电力能源的需求。作为钻机回转动力,既要满足钻机高速钻进又要满足上卸扣的低速稳定需求,这对永磁电机直驱顶驱钻机的速度精确控制提出了极高的要求。
1 电机转矩控制
同步电机的电磁转矩计算见公式(1)。
(1)
其中:Eδ—负载气隙合成电动势;ω—永磁同步电动机的机械角速度;Iq—电动机定子电流交轴分量;I—电动机定子电流直轴分量;θi—电动机的功率角。
交流电动机常用的控制方式有两种,直接转矩控制技术和矢量控制技术。直接转矩控制技术与矢量控制技术相比,控制结构简单,动态响应快但调速范围小,低速和高速时转矩脉动大。基于顶驱钻机不同工况下对转速的要求,本系统采用矢量控制技术对永磁顶驱电机进行调速。根据试验过程,主要从编码器类型,编码器安装,长距离传输信号干扰三个方面进行分析。
2 编码器的类型及安装
编码器作为位置传感器用于获取电机的实际位置。试验过程中分别选取以下三种编码器进行尝试。
2.1 轴套型增量编码器
因顶驱电机轴径不能小于160 mm,轴套型增量编码器无法直接安装于电机的轴端。采用齿轮传动方案,将轴套型增量型编码器(2048)安装于小齿轮传动轴上,小齿轮和电机轴端大齿轮传动比为46∶37,见图1。
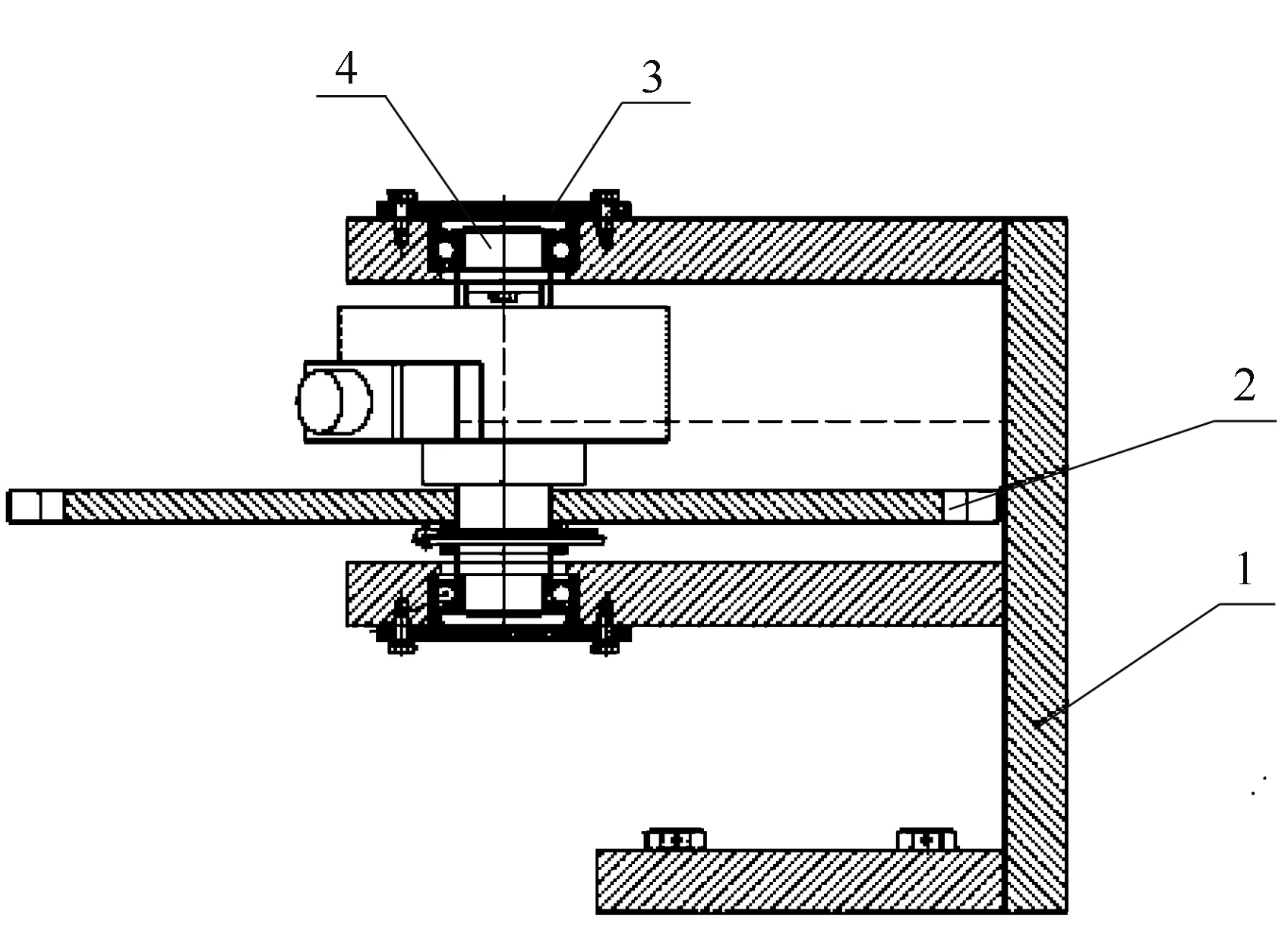
1.编码器基座;2.编码器齿盘;3.编码器挡盖;4.编码器主轴图1 轴套型增量编码器安装示意图
齿轮间隙造成系统整体误差放大,电机开环运行状态下编码器反馈频率和电机给定频率相差较大,采用速度闭环时电机运行不平稳,抖动明显,闭环失败。为此,顶驱钻机只能通过提高齿轮间的配合进行改进,对顶驱钻机装配提出了极高要求,长时间运行后扰动略大,都会为永磁直驱顶驱钻机带来失步的危险。
2.2 旋转变压器
根据电机轴径尺寸,定做旋转变压器,变压器相关参数见表1。

表1 试验选用旋转变压器参数
通过原副边绕组随转子的角位移,输出相应大小的电压反映电机位置信息,电路图见图2,通过跳线对电阻进行调整,保证旋转变压器的励磁供电电压为7 V。输出电压方程式为:
US1S3=KUR1R2cos20θ
US2S4=KUR1R2sin20θ
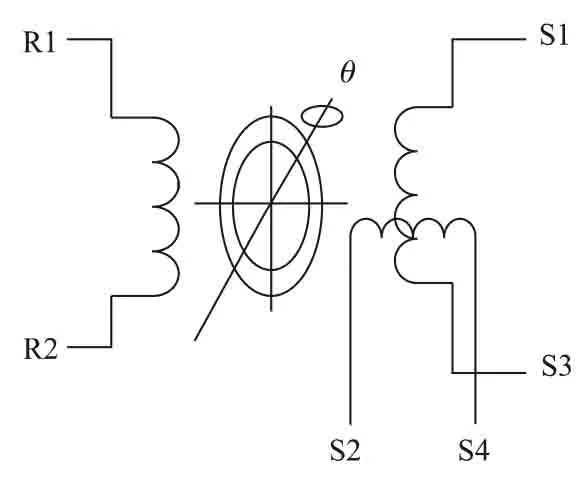
图2 旋转变压器电路图
旋转变压器对安装精度要求较高,首先尝试采用单轴承安装于过渡轴上。在这种安装方案下,电机旋转时旋转变压器可见椭圆运动轨迹,气隙不均匀,编码器反馈频率扰动较大,见图3。

曲线A-编码器反馈频率 曲线B-电机实际运行频率图3 旋转变压器(单轴承安装)编码器反馈频率曲线
通过对比可以看出,气隙不均匀带来的扰动最大可达到2.1 Hz,以此基础设置电机速度闭环运行,电机电流扰动较大,钻机扭矩随之波动,无法满足顶驱钻机稳定运行要求。因此对旋转变压器的安装进行改进,采取双轴承固定,进而保证了电机转动时气隙的均匀程度,安装方式见图4。旋转变压器采用双轴承安装方式,电机运行较为稳定。
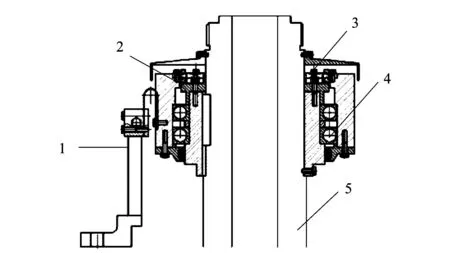
1.固定引脚;2.定子;3.转子;4.轴承;5. 过渡轴 图4 旋转变压器安装示意图
2.3 齿轮式编码器
齿轮编码器可直接安装于电机转轴上,具有较强的抗机械损伤功能,同时也最大程度的保证了编码器与电机轴的同步性。齿轮编码器频率反馈曲线见图5,通过开环运行可以看出,编码器反馈频率与电机实际运行频率近乎两条曲线近乎重合,满足闭环运行条件。

曲线A-编码器反馈频率 曲线B-电机实际运行频率图5 齿轮编码器反馈频率曲线

图6 永磁直驱顶驱钻机空载运行电流及频率特性曲线
电机空载闭环运行时,电流特性曲线如图6所示,通过对比可以看出,电机仅在启动瞬间会形成一个较大的峰值电流(145 A左右),当转子找准位置后,电机电流始终保持在4 A左右,充分体现了永磁电机作为顶驱直驱动力的优势。顶驱钻机系统在1~165 r/min运行时转速平稳,电流波动小,效果良好。
3 长距离传输信号干扰的解决
在钻探现场,电磁波极易干扰影响信号传输。现场从变频器信号接收端至顶驱电机编码器安装端,编码器信号传输线全长62 m,诸多干扰因素都会影响顶驱钻机的运行性能。
(1)抑制变频器和供电电源干扰。大功率变频器对周围的电气元件烦扰严重,为此变频器进线端增加滤波器,出线端增加电抗器,并为编码器提供隔离供电电源,将变频器和编码器电源对信号的干扰降低到最小。
(2)消除信号线屏蔽层接地干扰。编码器信号设置专用接地,并与变频器/电机设备接地采取隔离措施,确保编码器的专用接地不受干扰。
(3)不同电压等级电缆分开布线。为了减小外界干扰及线路自身的干扰,编码器电缆采用屏蔽双绞线。布线时与电机动力电缆保持20 cm以上的间距,避免长距离平行布线,保证信号的稳定传输。
4 结论
永磁直驱顶驱钻机因其结构形式所限,必须确认合适的编码器进行位置闭环。根据对比试验,轴套型增量编码器因安装尺寸受限,通过齿轮变比传递转速信号,无法保证反馈信号精度,故不推荐使用。可采用旋转变压器双轴承安装方式或齿轮编码器直接安装于电机轴上用于转速的精确反馈。同时在安装和布线过程中保证精度降低干扰,才能保证永磁直驱顶驱钻机转速的精确控制。
[1] 王成元,夏加宽,杨俊友等. 电机现代控制技术[M]. 北京:机械工业出版社,2007.
[2] 陈伯时. 电力拖动自动控制系统[M]. 北京:机械工业出版社,2006.
猜你喜欢
中国设备工程(2022年17期)2023-01-02
铁道建筑技术(2021年4期)2021-07-21
石油工业技术监督(2021年3期)2021-03-16
安徽地质(2019年2期)2019-10-30
成都信息工程大学学报(2018年3期)2018-08-29
地质装备(2018年3期)2018-04-15
中国设备工程(2017年7期)2017-04-10
凿岩机械气动工具(2016年1期)2016-11-11
电子器件(2015年5期)2015-12-29
凿岩机械气动工具(2015年3期)2015-11-11
