
喀麦隆杜阿拉航道浅区航行和施工时船舶的操纵与避让
2018-03-04 18:15:56牟勤张敏白军
世界海运 2018年2期
牟 勤 张 敏 白 军
一、引言
喀麦隆杜阿拉港航道由于长时间缺少维护,航道内水深不足,且航道内经常有大量捕鱼船舶撒网捕鱼,给进出港船舶和疏浚作业船舶航行造成了较大限制。疏浚作业船舶为尽快疏通航道,须采取有效的措施以避让进出港船舶和捕鱼船,提高疏浚船舶的生产效率。疏浚船舶须在合理利用国际海上避碰规则的前提下,结合当地港口的规章和特殊条件限制,制定在各种条件下的避让方法和操纵措施,以确保在航道浅区安全、顺利、高效施工作业。
二、喀麦隆杜阿拉航道疏浚施工概述
1.杜阿拉航道基本情况
喀麦隆杜阿拉航道整体走向为西南—东北向,图1所示为该航道走向,航道底宽150米,航道全长约为12海里,港方公布的航道水深为7米,但由于严重淤积,多处水深小于6米,引航员登离船位置在PK14处。正常情况下整个航道从PK28位置开始的0#浮筒到PK4位置的36#浮筒,沿着进口方向航道边浮为左红右绿布置,但由于航道缺乏有效维护,整个航道浮筒缺失较为严重,夜间只有约10个浮筒可见。
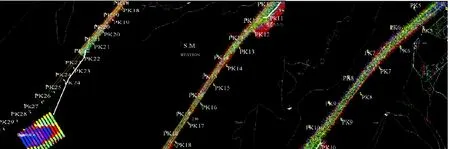
图1 航道走向图
2.疏浚区域
本次疏浚区域为码头16#泊位外端头PK4—PK22处,整个疏浚区域长度18千米,航道底宽150米,疏浚浚深7米,疏浚初期航道中间区域50米内水深平均约5.8米,两侧50米水深从航道边线向内4.5~5.5米递增,航道外水深3~4米不等,在PK10—PK11(27号绿浮)东南侧航道外有一片宽100米、长1 200米的区域水深为6米左右,PK22—PK28航道东南侧外200米范围内水深约6.5米,这两处水域可用于进出港船舶交汇避让。
3.疏浚船舶
承担疏浚任务的耙吸式挖泥船为“航浚4012”,表1所示为该船舶的基本参数。

表1 船舶参数表
三、疏浚船航行和施工时与进出港船舶的避让关系及操纵措施
由于杜阿拉港航道水深限制,根据港口规定:所有进出港船舶每天必须在两个高平潮前后两小时内进出港口,且在每天LT1030和LT1630开港务会议后才会公布进出港船舶动态,一般情况下限于吃水的船舶都会选择在高平潮时间点进出港,港方基本的原则为出口几条船才有几条船进口。当地引航员一般选择在PK14附近上下船舶,并且是从出口船下来后直接上另一条进口船舶,因此进出港船在PK14至锚地附近PK28 处约7.6海里的航道均为船长自引状态,并且在PK7和PK13这两个弯段附近是禁止船舶交汇和追越的。针对杜阿拉港航道特殊的环境,疏浚船在航道内航行和施工时须采取有效的避让和操纵措施,以保障船舶航行和施工安全。
(一)疏浚船非作业状态下与进出港船舶的避让关系及操纵措施
根据国际海上避碰规则中关于操纵能力受到限制的船舶的定义[1]:疏浚船舶在没有从事疏浚作业时即为普通的在航机动船,因此疏浚船舶在起耙航行时应被视为普通在航机动船。
1. 疏浚船非作业航行状态下避让限于吃水的船舶
疏浚初期,航道中间50米范围水深5.5~6米,高平潮时潮位约2.5米,因此吃水7.5米以上、船宽大于30米的船舶进港过程中为限于吃水的船舶,根据避碰规则第十八条“船舶之间的责任”第4款规定:除失去控制的船舶或操纵能力受到限制的船舶外,任何船舶,如当时环境许可,应避免妨碍限于吃水的船舶的安全通行。因此限于吃水的船舶进出港口时,“Douala Port Control”会提前呼叫疏浚船必须在航道外避让,疏浚船只能根据自己船位选择在PK22—PK28航道东南侧外200米范围或者PK10—PK11航道东南侧边线外100米宽度的小空当进行避让。在PK10—PK11航道外避让时,疏浚船在这片狭小的区域须利用车、舵和首侧推综合操纵顶水控制船位,此时与进港船舶形成绿灯会遇状态,须提前与进港船舶联系并协调避让,以免与进港船舶造成误会。
2. 疏浚船非作业航行状态下与进出港船舶间的避让措施
疏浚船非作业航行状态下与进出港船舶在航道内会遇时,按照避碰规则第九条“狭水道”第一款规定[1]:沿狭水道或者航道行驶的船舶,只要安全可行,应尽量靠近其右舷的该水道或航道的外缘行驶。由于航道只有中间50米范围水深较深,进出港船舶出于安全航行的考虑,通常在航道中央行驶,疏浚船与其红灯会遇时只能将船位控制在航道边线上。当疏浚船重载与进港船舶会遇时,航道边线只有5米左右水深,一般须采取减车降速,备好首侧推以控制船位,必要时须降低溢流槽的高度以减少船舶装舱容积和吃水,避免船间效应作用使疏浚船舶偏出航道发生搁浅。当疏浚船舶空载与出口船舶会遇时,只需适当控制船速,保持船位在航道边线上正常红灯会遇即可。
(二)疏浚船在疏浚作业状态下与进出港船舶的避让关系及操纵措施
根据避碰规则第三条“一般定义”第7款定义:操纵能力受到限制的船舶指由于工作性质,使得其按照本规则条款的要求进行操纵的能力受到限制,因而不能给他船让路的船舶。因此疏浚船舶在从事水下疏浚作业时即为规则定义的“操纵能力受到限制的船舶”。
1. 疏浚船在疏浚作业状态下与进港船舶的避让及操纵措施
避碰规则第十八条“船舶之间的责任”第1款规定:机动船在航时应给操纵能力受到限制的船舶让路。然而,在杜阿拉航道疏浚作业过程中,疏浚船在航道北边线向外施工作业时,进港船一般都不会按照规则给疏浚船舶让路,尤其是引航员引领进港船进港时,都会要求疏浚船舶尽量靠边线或者直接让疏浚船让到航道边线外,特别是夜间疏浚作业时。当与进港船红灯会遇前,为了能够更加宽裕地让清进港船舶,一般采取双耙离地到三管平位置,且备好首侧推,同时将溢流槽高度调整到最低的位置以减少船舶吃水,再根据进港船舶航行的位置和本船富余水深情况,尽量把船位控制在边线附近避让进港船舶,同时须避免疏浚船舶偏离航道太多而发生搁浅事故。
2. 疏浚船在疏浚作业状态下与出港船舶的避让及操纵措施
疏浚船舶疏浚作业都是采取空船航行到指定区域后掉头施工的方式,而在有进出港动态期间都是疏浚航道北边线,因此对于出港船舶就要从疏浚船左舷进行追越。根据避碰规则第十三条“追越”第1款规定:不论规则第二章第一节和第二节的各条规定如何,任何船舶在追越任何他船时,均应给被追越船让路。但在实际避让过程中,引航员一般都要求疏浚船舶尽量靠近航道边线或者直接让疏浚船让到航道边线外。一般采取双耙离地到三管平位置,且备好首侧推,同时将溢流槽高度调整到最低的位置以减少船舶吃水,同时要求驾驶人员控制好本船船位,速度尽量慢一点,且随时核对追越船的位置和动态,直到追越船完成追越并驶过让清后才能正常投入施工。
四、疏浚船航行和施工时避让航道内渔船、渔网和鱼浮的措施
杜阿拉港航道内每天都会有大量的渔船,且多数渔船都是非机动船,靠人力划桨或简易风帆驱动。由于航道两侧水深比较浅,航道内水流急,因此渔民都喜欢在航道内撒网捕鱼。还有些机动渔船经常在航道内大面积撒网,在施工区域PK11—PK14处尤为集中,有时渔船和渔具铺满整个航道,严重妨碍船舶施工和航行,特别是在夜间航行时,由于这些渔船都没有任何信号指示灯,本船只能依靠雷达进行瞭望识别,驾驶员必须时刻警惕防范。航道内还有许多鱼浮和渔网,这些渔具标志不明显,经常要在非常靠近的时候才能辨别,避让不及时则会使这些渔网绞入螺旋桨,图2所示为航道内渔船和渔网。

图2 航道内渔船和渔网
1.疏浚船在施工和航行状态下避让航道内渔船的措施
根据避碰规则第三条“一般定义”第4款:从事捕鱼的船舶是指使用网具、绳钓、拖网或其他使其操纵能力受到限制的渔具捕鱼的任何船舶,但不包括使用曳绳钓或其他并不使其操纵性能受到限制的渔具捕鱼的船舶。在航道内撒网或是收网捕鱼的渔船为规则定义的从事捕鱼的船舶,而规则第九条“狭水道”第3款规定:从事捕鱼的船舶,不应妨碍任何其他在狭水道或航道内航行的船舶通行。但是在杜阿拉港口疏浚船在施工和航行时基本上每天都要遇到大面积的在航道内从事捕鱼的船舶,特别是航速较慢的施工期间,有些渔船还要特意靠近疏浚船捕鱼。白天避让时疏浚船舶须采取减速慢行、鸣汽笛警告声号、派专人瞭望、提前判断好渔船的动态及动向等措施,从渔船及渔网的空当慢速机动转向穿行;夜间对不显示灯光的渔船,只能借助雷达瞭望,两个雷达分别选择1.5海里和3海里的量程,对比回波进行判断,如夜间对于雷达小回波目标无法判断时应假定该回波为渔船,须减速、转向进行避让,同时开启驾驶台顶部的两个强力探照灯对渔船方向进行探射,起到探明渔船或者对渔船进行警告的作用。如大面积渔船或渔网等严重影响船舶施工或航行时,可让船上保安配备的BIR武装人员到船头开枪警示进行驱离,或是报告“Douala Port Control”后让港方派巡逻艇出港进行驱赶。
2.疏浚船避让渔网及螺旋桨防渔网缠绕的措施
当捕鱼船在航道内大面积撒网捕鱼时,疏浚船舶只能采取减速措施,在所见的鱼浮大空当内机动转向进行避让。渔网布满航道无法避让时,在鱼浮到达船头前停车,利用船舶惯性余速穿过鱼浮或渔网,同时须到船舷边跟踪观察,看鱼浮是否随着船舶前进方向移动,以判断渔网是否缠绕螺旋桨,待鱼浮或渔网完全通过船尾后再加车慢速前进。航行到抛泥区进行抛泥时,要求每次双车都要轮流进行倒车操作,可利用倒车将缠绕螺旋桨的渔网甩出。
五、结论
通过对喀麦隆杜阿拉航道浅区航行和疏浚施工作业的特殊性进行分析后,论述了疏浚船舶在非作业状态下和疏浚作业状态下与进出港船舶的避让关系及具体的操纵措施,分析了疏浚船舶航行和施工时避让航道内渔船、渔网和鱼浮的方法和措施,对进出杜阿拉港的船舶和在该航道进行疏浚作业的船舶而言具有一定的实际指导意义。
[1]吴兆麟.船舶避碰与值班[M].2版.大连:大连海事大学出版社,1998.
猜你喜欢
海洋通报(2022年3期)2022-09-27 02:46:20
航海(2020年6期)2020-12-23 06:53:37
珠江水运(2019年9期)2019-06-02 17:00:04
水运管理(2017年11期)2018-01-02 00:08:54
中国港湾建设(2017年11期)2017-12-19 12:27:01
小雪花·成长指南(2016年8期)2016-09-21 02:39:41
股市动态分析(2016年31期)2016-08-20 15:43:01
电脑知识与技术(2014年17期)2014-07-28 18:53:42
电脑知识与技术(2014年13期)2014-07-18 00:42:13
水道港口(2014年1期)2014-04-27 14:14:35
