基于软件观测器的无刷直流电机控制策略研究和实验
2018-03-02 09:45顾加鹏顾佳辉任明乐王保升
机电产品开发与创新 2018年1期
顾加鹏 ,顾佳辉 ,任明乐 ,王保升 , 李 宁
(1.南京工程学院,江苏 南京 211167;2.智能制造装备研究院,江苏 南京 211167)
0 引言
根据励磁磁势的不同,三相永磁同步电机可以分为正弦波形永磁同步电机(PMSM),方波形永磁同步电机(BLDC)。按照传统的技术,正弦波永磁同步电机,一般采用正弦波矢量控制技术,用于高精度的位置伺服控制,需要比较高精度的位置检测器,如光电脉冲编码器、旋转变压器等等[1]。无刷直流电机一般采用方波控制方式,只用于简单的速度控制,仅仅装有简单的开关型霍尔位置检测器,其直接检测的精度只有60°电角度。无刷直流电机控制系统的主要优点是可靠,成本低,缺点是控制精度低,动态性能较差[3~5]。
本文为了克服传统无刷直流控制系统中存在问题,在保留了传统无刷直流电机控制系统优点的基础之上,通过软件观测器实现对无刷直流电机转角、速度、负载的准确检测,实现无刷直流电机的正弦波矢量控[6~10]。
1 软件观测器的实现原理
该软件观测器的结构如图1所示,该软件观测器实现的功能是实现对电机转角、速度的准确检测,检测过程分为两个部分:第一部分是通过对经过倍频的霍尔输出信号进行采样,滤波得到转角与转速的计算值;第二部分是依据电机学的动力学特征,构建电机模型得到转角与转速的观测。
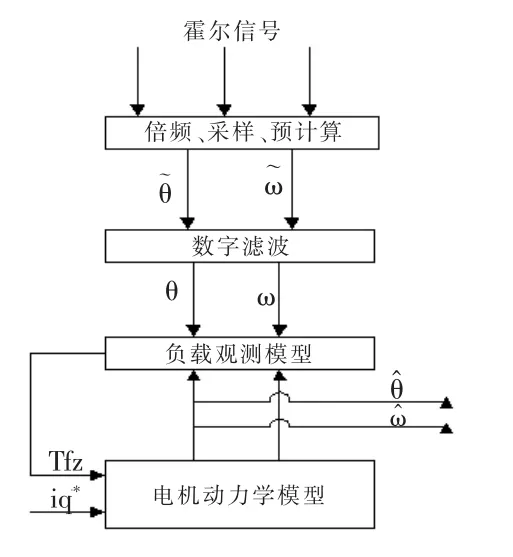
图1 软件观测器结构Fig.1 Structure of software observer
1.1 电机转角与转速的计算值

图2 霍尔位置输出信号Fig.2 Signal of hall position sensor
如图2所示,无刷直流电机的位置信号是由三个安装位置相隔120°电角度的开关型霍尔传感器产生,其输出信号为 Ha 、Hb、Hc,在每360°电角度内给出6个代码,排列顺序分别为101、100、110、010、011、001。
伊立替康(irinotecan)临床上主要用于治疗转移性结直肠癌,但会伴随急性胆碱能综合征、中性粒细胞减少以及肠黏膜炎等副作用,严重限制了伊立替康的治疗效果及临床应用[1-2]。诱导肠上皮细胞凋亡是伊立替康产生胃肠道毒性的直接原因,伊立替康及其代谢产物SN-38与拓扑异构酶I结合引发DNA损伤,在发挥抗肿瘤作用的同时导致正常肠上皮细胞的凋亡从而产生炎症[3]。临床上常用洛哌丁胺、奥曲肽、醋托啡烷、布地奈德等作为伊立替康胃肠毒性治疗药物,但这些药物本身会导致一定的毒性和致死率[4],故近年来研究方向逐渐转向具有多靶点多途径的中药减毒。
根据电机的动力学特征,构建出电机的转角与速度观测模型如式(5)和(6)所示:

这是中粮推行的“粮食银行+”农业综合服务平台功能之一。作为最大的国有农粮企业,自2016年起中粮在黑龙江、吉林、辽宁、内蒙古等粮食主产区,以区域粮库为主要抓手搭建起“粮食银行+”农业综合服务平台,将订单农业、农资服务、农机服务、“粮食银行”、农业金融、增值服务甚至移动互联网+的服务整合起来,直接对接服务农民。
式中:k—循环采样的次数,是电机转角的第k次计算值,(k)是电机速度的第k次计算值,N(K)是第k次检测到得位置脉冲总个数;P—电机磁极对数;T—检测周期。将得到的电机转角计算值和速度计算值,按照式(3)和式(4),进行低通滤波处理,得到电机的转角值和速度值:
改革开放40年,随着美剧、韩流、日本动漫等外来文化流入,中国文化价值观正发生深刻变化。广大青年推崇的西方自由主义和传统的孝廉文化观念在很多方面发生冲突。178年前大英帝国用一场鸦片战争撬开了中国大门。今天,中国传统价值观更是受到西方价值观的猛烈冲击。中国优秀传统文化如何传承发展成为亟待解决的一个时代命题。

式中:a1和a2是负载观测器系数可离线计算得到。
1.2 电机转角与转速的观测值
为了提高控制精度需要将Ha、Hb、Hc三路信号进行处理,一般的做法是将这三路信号进行倍频处理[2]。本文中将以固定的检测周期T,实时读取经过倍频以后的霍尔信号,实时记取脉冲的个数,通过式(1)和式(2)得到电机转角的计算值速度计算值:


式中:θ (k)—电机转角的第 k 次滤波输出值;ω(k)—电机速度的第k次滤波的输出值;α—滤波器系数,介于0和1之间,应当随着速度的变化进行调整,电机的速度越低值应该越小,反之值应该变大。
当前,中国以更加开放的姿态与全球合作,为中外企业创造了前所未有的发展新机遇。依托遍布全球100多个国家的业务布局、全球领先的创新技术以及丰富的海外项目管理经验,ABB全面融入中国倡议的“一带一路”建设,与400余家中国企业在70多个国家和地区开展紧密合作。仅在2017年,ABB就为280个“一带一路”相关项目提供了咨询、设计、工程、制造和服务,帮助降低项目成本和工程风险,在全球市场实现合作共赢。
2 软件观测器在控制系统中应用
无刷直流电机控制系统结构图如图3所示,分为位置环,速度环和电流环,位置环以转角观测值为位置反馈信号θ*,位置给定信号与位置反馈信号相减而得到位置跟随误差,位置跟随误差经位置控制器,输出速度环给定信号ω*,以速度观测值为速度反馈信号,速度给定值ω*与速度反馈信号相减而得到速度误差,速度误差经速度控制器,输出q轴电流给定信号iq*;检测电机定子电流ia、ib,经过旋转变换器形成交轴电流iq和直轴电流id;旋转变换器的旋转变换角度是,q轴电流的给定信号iq*与交轴电流iq相减而得到q轴的电流误差,此误差经q轴电流控制器,输出交轴电压 ,d轴电流的给定信号是0,直轴电流经d轴电流控制器,输出直轴电压ud,经逆变器形成电机定子,三相交流电压参考信号 ua、ub、uc,再经 SVPWM 调制,用于控制主回路的逆变器,驱动电路。其中,速度调节器,q轴、d轴电流控制器均采用PI控制算法。
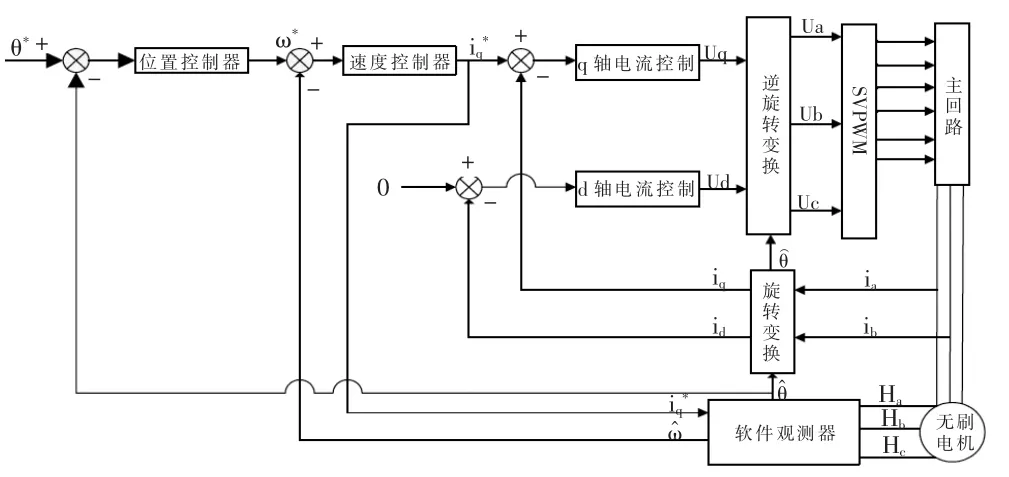
图3 基于软件观测器的控制系统框图Fig.3 Block diagram based on software observer
3 实验研究
此策略已经运用在无刷直流电机驱动塞拉门的往复开关运动实验中。此次实验硬件电路由无刷直流电机,电源模块,逆变器,处理器,电流传感器等组成,如图4所示,主回路采用交-直-交结构,以TMS320F28035为核心处理器,逆变器由智能功率模块IRMAX20UP60A实现,定子电流采样由两只电流传感器ACS712来实现,电流采集完毕后信号输入到TMS320F28035的A/D转换接口。图3中的软件观测器、位置控制器、速度控制器、d轴电流控制器、q轴电流控制器、旋转变换、逆旋转变换等模块均由软件实现,SVPWM由TMS320F28035内部的硬件实现。图5是实验过程中实际测得的电机位移、转速、输出转矩图,图6是电机转速理论观测值与实际测量值波形图,通过对比发现实际测量值的波形与理论观测值波形基本相同,取得了预期的效果。

图4 控制系统硬件框图设计Fig.4 Block diagram of hardware design
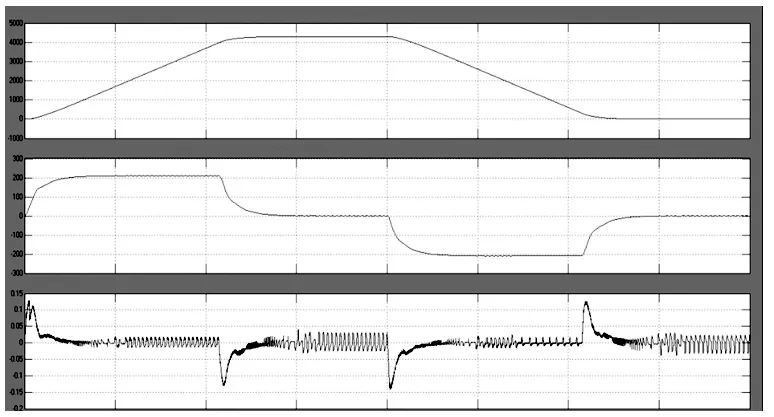
图5 实际位移、转速、转矩Fig.5 Actual displacement,speed and torque

图6 实际转速与理论转速Fig.6 Actual and theoretical speed
4 总结
本文将基于霍尔传感器的传统控制方法与无位置传感器的控制方法相结合,在无刷直流电机正弦波矢量控制系统中成功应用,既解决了传统控制方法精度不高的问题,也解决了无位置传感器控制算法复杂,计算量大的问题;即保留了传统无刷直流电机控制系统简单可靠低成本的优点,也提高了控制精度和动态性能。
[1]李宁,陈桂.运动控制系统[M].北京:机械工业出版社,2003.
[2]李宁,汪木兰,左健明.无刷直流电机霍尔信号细分反馈方法的研究[J].电力电子技术,2006(5):68-69.
[3]荀倩,吴勇,王培良,蔡志端.霍尔位置传感器无刷直流电机启动控制策略[J].中国测试,2016,8.
[4]颜晓鹏,钟汉如.基于霍尔位置传感器的BLDCM控制系统的位置学习[J].微特电机,2015,2.
[5]蔡明,章英,白雪莲,等.线性霍尔传感器技术及其在气动定位控制中的应用[J].仪表技术与传感器,2013,1.
[6]王哲蓓,王宏华.无刷直流电动机调速系统数字控制器设计与开发[J].电气与自动化,2016,1.
[7]程时兵,王炜.基于DSP的无刷直流电机位置伺服系统设计
[J].电子设计工程,2016,5.
[8]夏长亮,方宏伟.永磁无刷直流电机及其控制[J].电工技术学报,2012,3.
[9]谭亚丽,郭志大.无刷直流电机方波正弦波复合驱动器设计[J].电气传动,2011,6.
[10]周西峰,王严,郭前岗.基于吸d轴法的霍尔位置传感器安装方法研究[J].仪表技术与传感器,2013,4.
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
房地产导刊(2021年12期)2021-12-31
军民两用技术与产品(2021年7期)2021-10-13
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
北京航空航天大学学报(2017年6期)2017-11-23
电子制作(2017年1期)2017-05-17
山东工业技术(2016年15期)2016-12-01
电子制作(2016年1期)2016-11-07