某舰炮伺服系统建模仿真
2018-03-02 09:45王丹峰申中华
机电产品开发与创新 2018年1期
王丹峰,申中华
(中船重工第七一三研究所,河南 郑州 450015)
0 引言
某舰炮伺服控制系统采用典型的三环回路控制结构,即:位置环、速度环、电流环。计算机作为位置环控制器核心,对整个伺服控制系统以及舰炮整体采取集中监控、离散控制。位置环控制器算法由计算机程序实现,其核心是一段分段离散PID控制语句。速度环和电流环分别集成在伺服驱动器内部,速度环和电流环都采用了PI控制器。舰炮伺服系统的控制精度可以从两方面提高,一是选用更高精度的伺服驱动器以及执行机构,二是通过改进位置环控制器算法。因此为了研究控制器算法,建立被控对象的仿真模型非常必要,文献[5]建立了直流无刷电机伺服系统的速度环和电流环,并没有对位置环进行研究,不能实现定角度运行。文献[6,7]对无刷直流电机的数学模型进行了深入研究,分析了产生脉动的数学机理,并且给出了一些可行性改进措施。本文根据实际物理模型,旨在建立与实际舰炮伺服系统相一致的仿真模型。建立逼近的仿真模型对于研究位置环控制算法具有重要意义。
1 三环回路BLCDM数学模型
根据文献[1,4],无刷直流电机动态结构框为图1中虚线框,据此构建了数学模型下的三环回路控制系统,结构原理如图1所示。
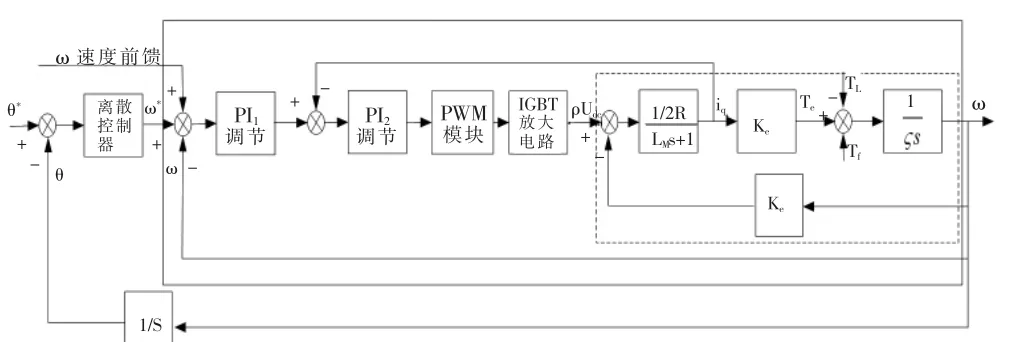
图1 三环回路控制原理框图Fig.1 Three loop control schematic diagram
其中小虚线框部分为电机控制对象,大实线框是电流环和速度环,为了简化控制系统数学模型,图中省略了速度反馈检测装置和位置环检测装置,认为反馈系数为1,忽略检测装置的延迟,认为检测信号瞬时完成,这样简化并不影响我们后面的数学分析。
速度和电流控制器均采用PI控制器,PI控制器的数学模型 Kp+Ki/s;PWM 和 IGBT 数学模型为 Kc/(Tcs+1),其中Tc为PWM控制器的平均失控时间,Tc根据PWM调制频率而定Tc=1/f,Kc为控制器功率放大系数。
带入各部分传递函数,可以得到系统正向控制闭环传递函数:

可以看出系统是5阶线性系统,PI控制器的参数可以通过计算获得想要的性能参数[4],这里我们将系统调节成3阶线性系统,通过调节PI参数,获得相应极点位置,来达到系统满意的响应指标。
根据控制目标,做了以下假设:
(1)PI2控制器的参数与电机大惯性环节参数相等,分子分母零极点对消,即:

(2)同时认为PWM环节动态响应很快,忽略PWM模型时滞的影响,将伺服控制器数学模型简化成比例环节,即(Tcs+1)=1,这时系统模型简化为:

根据原理图搭建数学仿真模型,其中伺服驱动器放大系数根据经验取值25,电枢漏磁时间常数Lm=0.0005,负载转矩20Nm,在Matlab工具箱帮助下,通过参数调节Kp1=12,Ki1=0.01(积分系数也可以等于零,此时系统变成二阶系统)仿真结果如图2所示,从图2中看出,数学模型下系统响应很快,系统到达最高转速几乎没有超调,实际物理伺服系统的加速度并做不到这么大,仿真结果无法逼近实际的运行状态,再加上物理系统存在库伦摩擦、控制器饱和等非线性因素,导致了数学模型在实际工程中无法应用,因此有必要建立更加接近物理系统的仿真模型。

图2 数学模型调转60°速度响应曲线Fig.2 Mathematical model steps 60°response curve
2 基于SIMPOWER工具箱建立的伺服系统仿真模型[2 ]
根据原理图1,利用Matlab的SIMPOWER工具箱搭建控制系统仿真模型,该模型包含了IGBT驱动电路、电机模型、霍尔信号检测,PWM发生环节等。其中电机模型采用了工具箱自带的模块。以下主要针对速度环,电流环进行分析。
速度环是将给定转速与反馈转速做比较,给出误差信号,经过PI控制器,转换成相应的转矩输出,给电流控制器,其中对转速和PI控制器都进行了饱和限制,模拟实际系统的最高转速饱和,如图3所示。

图3 速度控制器仿真模型Fig.3 Velocity controller simulation model
电流控制器设计:电流给定与霍尔信号逻辑处理模块的输出相乘,得到给定期望电流,之后与反馈电流相减,差值信号经过PI控制器输出给PWM发生器,控制占空比,PWM发生器输出PWM波驱动桥臂上的IGBT。电流环控制器结构总图如图4所示。

图4 电流控制器仿真模型结构总图Fig.4 Current controller simulation model
霍尔信号处理模块:对于三相电机,需要配备三个霍尔传感器来检测转子相对电枢位置,霍尔传感器根据检测到的开关信号,经过逻辑处理,转化成导通桥臂的逻辑信号,检测位置与相序关系如表1所示,模块原理图如图5所示。

表1 霍尔传感器信号输入输出编码表Tab.1 Hallelement input&output signalcoding

图5 decoder霍尔信号逻辑处理模块Fig.5 Hall signal logical process model
电流比较环节完成了给定电流和反馈电流的差,然后将电流差值送入电流PI控制器,PI控制器输出送给PWM发生器,产生的PWM波驱动IGBT,如图6、7所示。
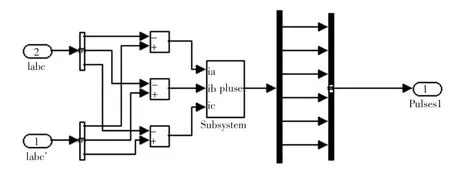
图6 电流比较环节Fig.6 Current compare block
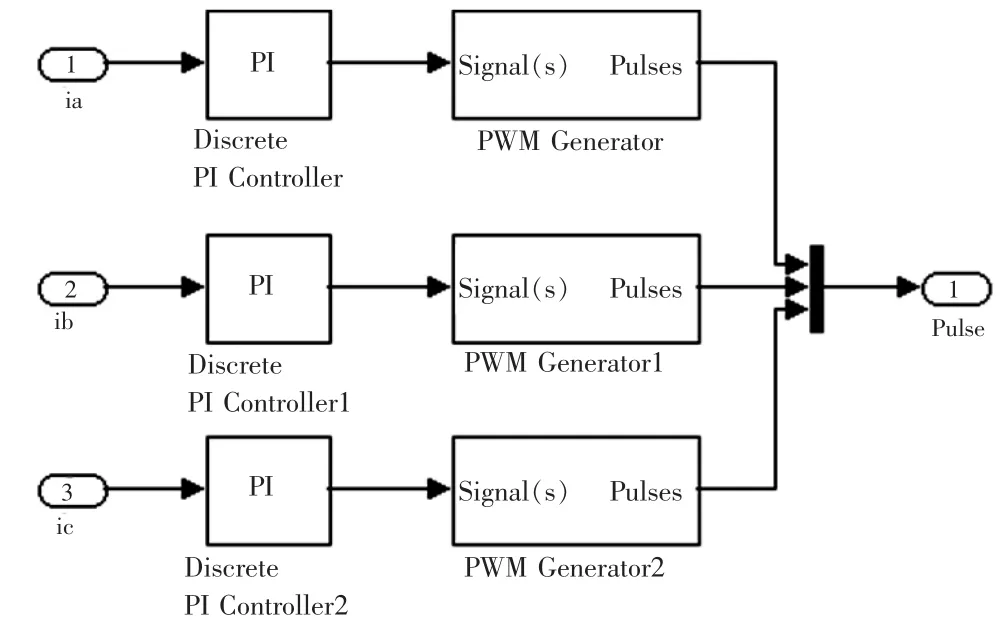
图7 电流PI调节和PWM发生环节Fig.7 Current PI controller and PWM generator block
位置环控制器是由S-function模块实现,模块功能是将给定位置和反馈位置实时比较,经过非线性分段PID处理,输出相对应的转速控制信号,模块程序流程图如图8所示。
为了构建实际系统的仿真模型,保证与实际系统相匹配,电机部分参数测量获得,单相电阻R=0.05Ω,电机铭牌标示额定转速3000r/min,电机额定输入电压AC165V,实际测量直流母线测端电压255V,启动最大电流155A,额定输出转矩30Nm,静转矩75Nm(最大值),最大转矩200Nm,电机轴转动惯量 Ge=0.0454kg·m2。
本文只针对舰炮高低系统做仿真,由于实际高低系统通过齿轮啮合将力矩传送给高低,在设计位置环控制器的时候将减速比计算在内,仿真显示速度和误差都是按照舰炮高低实际运行的速度来显示,保持与舰炮监控台的一致的速度显示效果,经过模型参数设置、PID参数调试,仿真结果如下:
等速 60°/s 转动60°,速度、误差响应曲线如图9所示。
正弦运动,振幅25°,周期 3.75s,速度、误差响应曲线如图10所示。

图8 位置环控制器程序流程图Fig.8 Position loop controller program flow chart
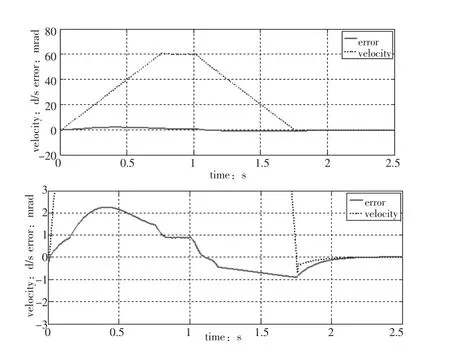
图9 等速60°/s转动60°速度、误差响应曲线Fig.9 Constant speed 60°/s rotate 60°velocity error response curve
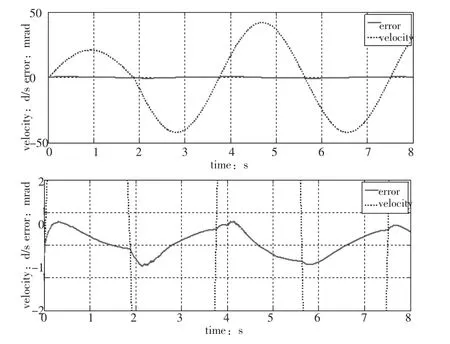
图10 正弦运动,周期3.75s、幅度25°速度、误差响应曲线Fig.10 Sinusoidal motion Cycle 3.75s Amplitude 25°velocity error response curve
从等速60°/s误差曲线可以看出,加速、减速阶段误差比较大,达到2mrad左右。当运行时间大于等于2s的时候,速度经过位置环控制器调整,误差减小,达到了0.1mrad,基本保持了与实际伺服系统一致的运行结果。
从正弦运动误差曲线看出,误差保持在正负0.8mrad范围内,与实际物理伺服系统保持一致。
3 结论
仿真模型能够实现调转、等速、正弦运动三种基本运动形式,仿真的速度、误差曲线与实际物理系统基本一致,所建立的仿真模型很好的模拟了实际物理系统,能为分析和设计位置环控制器提供帮助。
[1]张琛.直流无刷电机原理及应用[M].上海:机械工业出版社,1995.
[2]洪乃刚.电力电子、电机控制系统的建模与仿真[M].北京:机械工业出版社,2010.
[3]叶金虎.现代无刷直流永磁电动机的原理和设计[M].北京:科学出版社,2007.
[4]陈伯时.电力拖动自动控制系统(第三版)[M].北京:机械工业出版社,1992.
[5]杨向宇,杨进,邹利平.直流无刷电机控制系统的建模与仿真[J].华南理工大学学报,2005,8.
[6]许镇琳,柔建平,王秀芝.永磁式BLCDM交流伺服系统转矩脉动最小化[J].天津大学学报,1994,4.
[7]许镇琳,吴忠,王秀芝,江伟.无刷直流伺服电机换向最优控制[J].自动化学报,1996,4.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
体育科技文献通报(2022年3期)2022-05-23
新高考·高二数学(2022年3期)2022-04-29
煤气与热力(2021年12期)2022-01-19
电子制作(2019年23期)2019-02-23
制造技术与机床(2017年3期)2017-06-23
中学数学杂志(初中版)(2016年5期)2016-11-01
北京航空航天大学学报(2016年4期)2016-02-27
弹箭与制导学报(2015年1期)2015-03-11
筑路机械与施工机械化(2014年4期)2014-03-01