
多用途江海直达船模态分析与动力响应预报
2018-03-01 02:53,
船海工程 2018年1期
,
(上海交通大学 a.船舶海洋与建筑工程学院;b.水动力学教育部重点实验室,上海 200240)
船体振动可分为自由振动和强迫振动两大类,前者主要研究船体总振动的固有频率和固有振型,而后者主要研究船体在不同激励力下的响应。在船舶设计阶段确定船舶尺度、装卸载和推进方案时,需考虑避开主船体的低阶共振。如何获得船体梁自由振动特性,对于采取合理的设计方案和减振措施,避免船体梁与主要激励源发生共振是至关重要的[1]。随着有限元技术的发展,船舶振动计算已经由一维梁模型、二维平面模型发展为整船三维模型。目前已有不少基于数值分析对散货船、集装箱船及油船的振动研究,比如,有限元方法研究、振动耦合研究、计算程序研究和计算与试验对比研究等,标志着我国在船舶振动领域已取得重大科研成果。但是,我国在减小江海直达船振动方面还缺少行之有效的措施,在船舶设计阶段很少考虑振动问题和进行必要的振动计算[2]。
多用途江海直达船因其江海两用的特性,有着中转周期短、货物损耗少、营运成本低等优势,受到国家航运部门和企业的重视。该类船舶在航行过程中,吃水变化大,易受到浅水效应的影响。而且该类船舶目前越来越趋于大型化,又采用多机多桨船型,主机功率和螺旋桨转速也越来越大,使得船舶振动问题越来越突出,并且与主机振动、螺旋桨空泡、船尾部型线等都有密不可分的关系。考虑以典型的2 000 t级江海直达船为例,研究其振动特性。
1 模态分析理论基础及有限元建模
1.1 模态分析理论概述
通过求解振动特征方程,可以得到特征值和特征向量,其分别对应结构的固有频率和模态振型,再根据初始条件求得所需响应,即为模态分析。相比单自由度系统,对多自由度系统进行模态分析时,需要考虑单自由度系统所没有的特性,增加了复杂性,而实际的工程结构均可视为多自由度系统。
系统的运动方程为

(1)
由于在船舶总体振动中,船舶一般假定为一根悬在水面的变截面空心弹性基础梁,为一个平衡力系,整体模型处于弱约束状态,可看成在水面上的无阻尼自由振动,因此,本文以不考虑阻尼影响的系统自由振动为例,解耦方程。
不考虑阻尼时,多自由度系统自由振动方程为

(2)
其方程解为
a=φsin[ω(t-t0)]
(3)
式中:φ为n阶向量即模态振型;ω为φ的振动频率即固有频率;t为时间;t0是初始条件。将式(3)代入式(2),就得到一个广义特征值问题:
Kφ-ω2Mφ=0
(4)

0≤ω1<ω2<…<ωn
(5)
(6)
(7)
由式(6)和式(7)可以知道固有振型φ对M是正则正交性质,即
(8)
将(8)代入(4),可得
(9)
定义固有振型矩阵和固有频率矩阵为
Φ=[φ1φ2…φn]
(10)
(11)
求解固有振型矩阵和固有频率矩阵的方法有Lanczos法、Subspace法、Ritz法等。在Abaqus中集成了Lanczos法和Subspace法,可以选择其中之一进行计算。
1.2 有限元建模
以典型的江海直达散货船为例,全船主要为横骨架式结构,少数部分如上甲板、双层底及舷侧,采用纵骨架式结构,船型采用单甲板、双层底、双机、双舵、双桨、尾机船型,全船拥有一个货舱,货舱区域设双壳结构,横剖线图如图1所示。总长85.6 m、垂线间长80 m、型宽14.6 m、型深5.6 m,设计吃水3.8 m总吨位2 000 t。全船为Q235钢,弹性模量E=210 GPa,泊松比v=0.3,屈服强度σ=308 MPa。在建立三维有限元模型时,对上层建筑结构进行简化。船底、甲板和舷侧采用S4R四节点壳单元,骨材采用B31梁单元,建立的整船模型如图2所示,模型采用自由边界条件。
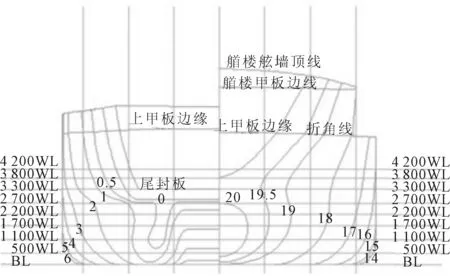
图1 总吨位2 000江海直达船横剖线图

图2 整船有限元模型
2 计算结果及分析
2.1 附连水质量
江海直达船可以由江直接驶入海里,反之亦然。当船舶在浅水中航行时,由于水深受到限制,将会产生浅水效应。此时船体与水的相对速度较深水情况就会有所增大,其增加的速度称为回流速度。由于回流速度的存在,船底流速将会增大,从而船底压力降低,船体下沉,造成吃水增加,而且螺旋桨的推进效率也会随之降低[3]。
当船舶在内河航行时,单位长度上垂向附连水质量公式为
(12)
式中:ρ为水的密度;b为剖面水线半宽;CV为修正系数;d为剖面处船舶吃水;S为水面处船舶剖面面积;Ki为修正系数,主要基于三维流动而定义的,与船的长宽比L/B及船舶振动有关;αv为浅水修正系数,和水深及剖面水线半宽有关。
考虑到浅水效应,采用文献[4]推荐的船舶在浅水航行时船体下沉量计算式
T=2×Cb×V2/100
(13)
式中:T为船舶下沉量,m;Cb为船舶方形系数;V为船速,kN。
计算得到,本船浅水效应下沉量为0.99 m。
当船舶在海水航行时,单位长度上垂向附连水质量为[5]
(14)
参数意义与(12)相同。
得到附连水质量后,连同货物载荷以虚拟质量点的方式平均加到船体上。
2.2 模态分析
选取满载出港和压载到港两种工况,分别取前三阶模态进行分析[6]。两工况部分计算结果见图3、4,具体固有频率见表1。

图3 内河航行满载出港垂向1~3阶模态

图4 海中航行满载出港垂向1~3阶模态

表1 垂向固有频率汇总 Hz
由结果可以看出,相比于海中航行工况,在内河航行时,船体固有频率略低,主要是因为受到浅水效应的影响,吃水加深,附连水质量加大。由内河浅水区向深水区行驶时,是易发生船体共振阶段,因为由于吃水的变化导致主机和螺旋桨转速发生变化,因而主机和螺旋桨激励频率也将跟着发生变化,在选择主机和螺旋桨转速时应注意避开船体共振。
2.3 动力响应计算
2.3.1 主机激励和螺旋桨激励
为了更好地了解江海直达船的振动特性,除了振型之外还需要进行一些必要的动力响应预报。主机和螺旋桨是船舶振动的主要振源之一,本船型所使用的主机和螺旋桨参数见表2、3。

表2 船舶主机参数

表3 船舶螺旋桨参数
主机激励主要是指主机工作时对船体产生的周期性力、周期性力矩。而螺旋桨工作时所引起的激振力相比于主机激励要更加复杂,大致分为两类:表面力和轴承力[7]。其中,表面力是主要振源,若螺旋桨产生空泡,桨表面力要增大几十倍。本文用DNV规定的方法,估算该船的脉动压力峰值[8]。见式(15)、(16)。
(15)
式中:Δp0为不计空泡影响的脉动压力峰值,Pa;n为螺旋桨转速,r/min;Dp为螺旋桨直径,m;z为桨叶数;ds为叶片位于正上方时,0.9R螺旋桨半径处距船体距离,m;R为螺旋桨半径,m;K0为系数,当ds/R≤2时,K0=1.8+0.4ds/R;当ds/R>2时,K0=2.8。
(16)
式中:Δpc为计及空泡影响的脉动压力峰值,Pa;Vs为船速,m/s;ha为桨轴沉深,m;Kc为系数,当ds/R<1时,Kc=1.7-0.7ds/R;当ds/R≥1时,Kc=1.0;wamax为伴流分数的最大值;we为伴流分数有效值。
总脉动压力峰值为
(17)
螺旋桨激振力为
(18)
式中:np为主机额定功率时螺旋桨转速;n为低于np的其他转速;Fmax为主机额定功率时螺旋桨的激振力;F为螺旋桨转速为n时的螺旋桨激振力。
螺旋桨表面力属于叶频干扰力,其频率为
f=n×z/60 Hz
(19)
本船在主机额定转速下运行时,其主机激励频率为12.5 Hz,螺旋桨叶频激励为16.7 Hz,倍叶频激励为33.4 Hz。根据CCS要求,为了防止共振的发生,船舶固有频率需要满足一定的频率储备,也就是各激振力频率需要避开的频率[9],见表4。
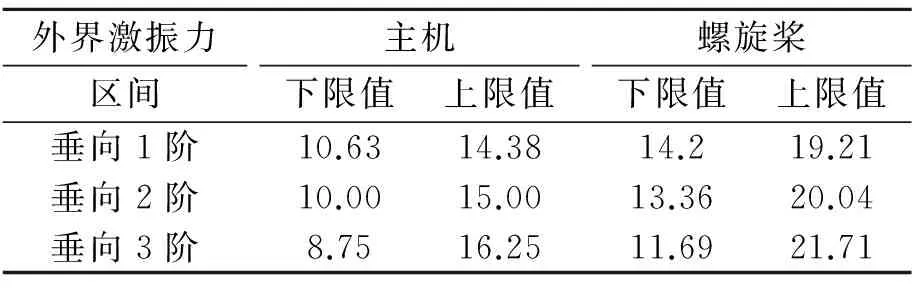
表4 船舶固有频率频率储备 Hz
由计算结果可知,船舶在主机额定转速下运行时,船体梁的固有频率都远低于船舶固有频率储备的下限值,说明该船设计良好,不会发生强烈共振。但是当船舶在由内河转入海里航行时,主机和螺旋桨激振力频率将发生变化,需要注意合理地调整主机和螺旋桨转速,使主机和螺旋桨激振力频率与船舶固有频率错开,并满足频率储备的要求。同时,所计算的船舶固有频率,可以为选择主机及螺旋桨转速提供参考,避免共振现象发生。
2.3.2 加速度响应幅值
根据上节的介绍,可以得出主机和螺旋桨激励力,然后选取船舶典型节点作为研究对象,计算其加速度响应。取机舱上主甲板左舷处(节点编号911)、货舱左舷处(节点编号3673)和首压载水舱主甲板中线处(节点编号10227)为研究对象。考虑了主机和单浆共同激励以及主机和双桨共同激励的情况,由Nastran计算结果见图5、6。
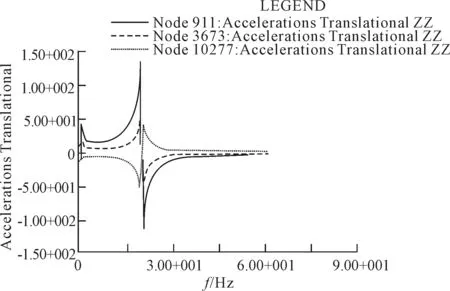
图5 主机和单浆共同激励下节点加速度响应幅值

图6 主机和双浆共同激励下节点加速度响应幅值
结果显示,主机额定转速下,单浆工作状态船舶振动加速度响应要大于双桨工作时,说明船舶双桨工作振动性能好于单桨工作。而且靠近船艉区域振动最大,艏部次之,中部区域振动最小;沿吃水方向,振动响应随着距船体底部的距离的增大而减小。
3 结论
1)浅水效应导致船舶下沉,使船舶吃水加深,附连水质量加大。满载出港时,船舶固有频率降低10%~15%;压载到港时,船舶固有频率降低12%~30%。这是因为满载比空载船舶总体质量大,振动频率低,不易发生大的振动。
2)船舶由内河浅水区驶入深水区或者海中时,是共振易发阶段,主要是因为单双桨交换工作,主机和螺旋桨激励频率变化大,期间很可能没有错开船体某阶固有频率。而且单桨工作时,相比于双桨工作船舶振动幅度增大了40%,因此船舶航行时宜采用双桨同时推进的方式航行。
3)除艉部区域振动外,艏部振动也比较大,主要因为艏部压载增加吃水,加重了船舶的振动,建议减少艏部压载重量,或采取其他方式调整平衡。
在后续的船舶设计与建造中,应充分考虑引起振动的不利因素,避开共振频率,如考虑压载水、油等液体在舱内的晃荡,风、浪、流载荷对船舶振动的影响,以及浅水效应时船底流体旋涡及粘
性对螺旋桨激励等的影响。此外,为更准确地评估全船振动时,还应分析水平振动和扭转振动。
[1] 周清华,肖蕾,耿厚才.VB.NET和NASTRAN混合编程在船体梁振动计算中的应用[J].船海工程,2017,46(2):69- 72.
[2] 骆庆卫.内河船舶振动及减振措施[J].江苏船舶,2004:21(5):17- 18.
[3] 周清华,李祥宁,胡要.滑行艇尾部结构的模态分析和响应预报[J].舰船科学技术,2011(7):50- 53.
[4] J.N. Newman. The Theory of Ship Motions[J]. Advances in Applied Mechanics,1979(18):221- 283.
[5] 姚熊亮.船体振动[M].哈尔滨:哈尔滨工程大学出版社,2004.
[6] 赵振轶.小水线面双体船总振动分析计算[D].大连:大连理工大学,2016.
[7] 王智群.某94.8 m集装箱船的振动分析与噪声预报[D].广州:华南理工大学,2016.
[8] A. Jha, E. Nikolaidis, S. Gangadharan. Cyclostationary Random Vibration of a Ship Propeller[J]. Journal of ship research,2003,47(4):299- 312.
[9] 中国船级社. 船上振动控制指南2000[S].北京:人民交通出版社,2000.
猜你喜欢
机械传动(2022年10期)2022-10-21
房地产导刊(2022年4期)2022-04-19
东坡赤壁诗词(2022年1期)2022-02-25
天津理工大学学报(2021年1期)2021-02-25
舰船科学技术(2020年6期)2020-11-27
航空发动机(2020年3期)2020-07-24
农产品市场周刊(2018年15期)2018-05-16
中学科技(2017年10期)2017-11-04
小学生·多元智能大王(2014年7期)2014-08-22
计算机辅助工程(2012年5期)2012-11-21
