月球探测器力学环境研究及试验条件制定
2018-02-28 00:44李青任德鹏王闯张熇
航天器工程 2018年1期
李青 任德鹏 王闯 张熇
(北京空间飞行器总体设计部,北京 100094)
不同于传统航天器,月球探测器经历的飞行过程复杂、存在多器组合体或单器运行状态,对探测器的结构力学设计有更加复杂的力学环境适应性要求。月球探测器在整个任务过程中,除了要经历传统航天器必须经历的发射段低频振动环境、中高频段声振环境、高频段火工品爆炸冲击环境[1]之外,还要经历一些特殊的力学环境,包括着陆探测器在软着陆过程中经历的着陆冲击环境和巡视探测器在月面移动过程中经历的颠簸振动环境。因此,在探测器研制过程中除了要进行常规的力学环境试验之外,还必须考虑所经历的特殊力学环境并开展有针对性的环境模拟试验。相关的环境分析和试验条件制定方法在国内尚处于研究阶段,文献[2]提出了软着陆冲击动力学仿真方法并分析了结构设计参数对冲击响应的影响,但对环境模拟试验及其试验条件的制定没有给出完整的解决方案;国外在这方面的研究也鲜见于公开发表的文献中。
本文结合我国月球探测器研制实践,对探测器任务过程中经历的力学环境及对探测器的影响进行了分析,对着陆冲击环境和颠簸振动环境等特殊力学环境提出了环境分析和试验条件制定方法,并应用于嫦娥三号和嫦娥五号月球探测器的研制过程中。
1 月球探测器的飞行阶段和力学环境
根据月球探测器承担任务的不同,探测器系统所经历的飞行阶段也不尽相同。对于执行绕飞探测任务的月球探测器,一般经历发射入轨段、地月转移段、近月制动段、环月飞行段;对于执行着陆探测任务的月球探测器,经历的飞行阶段还包括着陆下降段、月面工作段;对于执行采样返回任务的月球探测器,经历的飞行阶段还包括月面起飞上升段、交会对接段、环月等待段、月地转移段和再入回收段等,如图 1所示。在不同的飞行阶段,月球探测器经历的力学环境有着不同的特点。
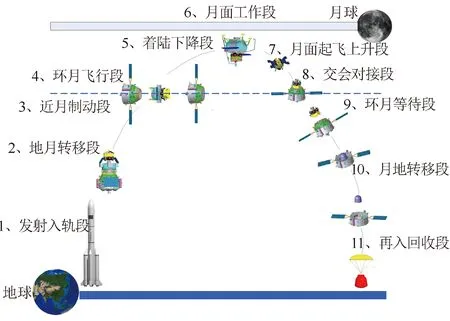
图1 月球探测器飞行阶段示意图Fig.1 Illustration of flight phases for lunar probes
发射入轨段一般是力学环境最为恶劣的阶段,月球探测器经历的力学环境与传统航天器所经历的基本一致,主要包括由运载火箭发动机推力产生的稳态加速度环境,由火箭发动机点火关机过程、跨音速过程、助推和级间分离过程等导致的低频瞬态振动环境,由火箭发动机喷气流和大气层内飞行的气动噪声导致的中高频声振环境,以及器箭分离过程中火工品起爆产生的高频瞬态冲击环境[1]。上述力学环境是制定月球探测器及其组件力学环境试验条件的主要依据,分别对应着加速度试验条件(对于结构类产品可用静力试验条件等效替代)、正弦振动试验条件、随机振动试验条件和冲击试验条件。
地月转移段、近月制动段、环月飞行段的力学环境也与传统航天器的类似,主要是探测器在变轨和轨道修正过程中的发动机推力脉动环境,此外还有太阳翼等机构解锁展开、器间舱段解锁分离产生的火工品爆炸冲击环境。前者一般能被发射段力学环境试验条件覆盖;而后者对冲击源附近的组件可能产生比器箭分离冲击更高的响应环境,作为制定冲击试验条件的补充依据。
着陆下降段是着陆探测器特有的飞行阶段,在这个阶段中探测器先经历主动减速过程的发动机推力脉动环境、再经历着陆缓冲过程的瞬态冲击环境。减速下降过程的发动机推力脉动环境一般也能被发射段力学环境试验条件覆盖,但由于持续时间较长,部分组件工作状态与发射段时不同,故对于一些敏感组件需要开展针对性的随机振动试验。着陆缓冲过程的瞬态冲击环境比较特殊,由于着陆缓冲装置的缓冲和滤波作用,高频段响应被削弱而在中低频段会存在较大响应,不同于火工品爆炸引起的高频段响应为主的瞬态冲击环境,典型的着陆冲击响应和爆炸冲击响应对比如图 2所示。因此,一般用来模拟爆炸冲击环境的冲击试验条件不能很好地模拟着陆冲击环境,有必要针对着陆冲击环境开展深入研究,提出更为合理的试验条件制定方法。
月面工作段是月球探测器执行月面任务的关键阶段,月球表面存在重力环境,重力加速度为1.62 m/s2,约为地球表面重力加速度的1/6,此外这个阶段中的力学环境主要由探测器在月面上执行任务规划的相关动作所导致,例如月球车在月面开展巡视探测时经历的颠簸振动环境。月面地貌按自然形态大致可分为月海和高地两大地貌类型,月海是月面上宽广的平原地区,高地是月面上高出月海、起伏较大的地区,月海和高地均覆盖有大大小小的石块和撞击坑[3]。巡视探测器在驶过这些石块和撞击坑时会对器上组件,特别是太阳电池阵、天线等具有悬臂构型的组件,产生明显的颠簸振动环境。针对此环境的试验条件制定没有成熟的经验可以借鉴,需要进行专门的研究。
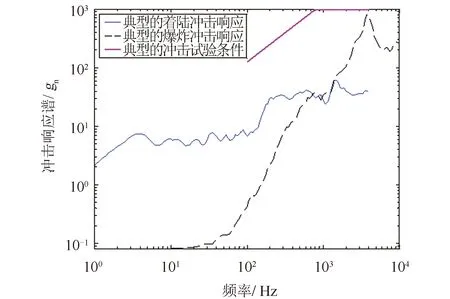
图2 典型的着陆冲击响应和爆炸冲击响应对比Fig.2 Comparison of typical landing impact responses and blast shock responses
月面上升段是执行返回任务的月球探测器所特有的飞行阶段,在这个阶段中探测器发动机点火起飞直至进入上升目标轨道。与着陆下降段类似,探测器主要经历发动机推力脉动环境,对于一些工作状态与发射段时不同的敏感组件也需要开展针对性的随机振动试验。
交会对接段是指月面起飞的探测器进入上升目标轨道以后与留轨的探测器进行对接的过程,期间要进行多次轨道机动,并通过控制系统建立对接停靠所需的初始条件,之后完成捕获、样品转移、舱段分离等工作。在这个过程中,轨道机动会产生发动机推力脉动环境,但持续时间较短,一般能被其它阶段的力学环境试验条件覆盖;捕获锁定环节会产生一定的瞬态冲击环境,但由于控制系统保证了接近零相对速度的对接初始条件,并且对接机构具有缓冲设计,因此该冲击响应一般不大[4-5];样品转移、舱段分离涉及到火工品爆炸解锁,其产生的高频瞬态冲击环境需作为制定冲击试验条件的补充依据。另外,需要注意的是在发动机推力作用期间或在舱段分离过程中分离弹簧推力作用期间会产生一个准稳态加速度环境,该环境一般不会超过发射段的加速度试验条件,但对于像太阳电池阵这样的展开机构应关注其展开状态的承载能力,进行相应的加速度试验或静力试验加以验证。
环月等待段、月地转移段与环月飞行段、地月转移段类似,主要经历轨道修正和变轨过程中发动机推力脉动环境、返回器与轨道器解锁分离产生的火工品爆炸冲击环境。
再入回收段是指返回器以再入姿态进入地球大气层,经降落伞减速,着陆至预定回收区域的过程。在这个过程中,返回器主要经历在大气层内飞行时气动阻力导致的稳态加速度环境、气动噪声导致的中高频声振环境和着陆地面时着陆冲击导致的瞬态冲击环境[6],需要分别开展仿真计算和试验分析,以确定它们能否被其它阶段的力学环境试验条件覆盖。
综上,月球探测器的力学环境与所经历的飞行阶段密不可分,需要逐一分析并提出科学合理的力学环境试验条件。下面,本文将着重介绍着陆冲击力学环境试验条件和巡视颠簸振动环境试验条件的制定方法。
2 着陆冲击力学环境试验条件制定方法
在制定着陆冲击力学环境试验条件之前,探测器总体设计部门需对着陆探测器的着陆冲击过程开展动力学仿真[2]和地面试验[7],得到的分析和试验数据作为制定器上组件试验条件的主要依据。
原始的分析和试验数据为着陆探测器各关键部位或组件安装处的瞬态加速度数据,一般采用改进的递归数字滤波算法[8]将其转化为冲击响应谱,转化过程中需根据实际结构特性选取阻尼比和放大因子,一般取阻尼比ζ=0.05,放大因子Q=1/(2ζ)=10[9]。冲击响应谱的横轴为频率,纵轴为响应幅值,表征的是对应固有频率的单自由度振动系统在该瞬态加速度激励作用下的最大响应。
冲击响应谱可以直接用于制定冲击试验条件。冲击试验条件一般由起始频率、上升斜率段、拐点频率、平直段和截止频率组成,受到冲击试验设备控制能力限制,起始频率一般为100 Hz,拐点频率为800 Hz左右,截止频率能达到4000 Hz左右,拐点频率低于300 Hz的冲击试验条件通常难以实现。针对火工品爆炸冲击环境所制定的冲击试验条件一般能够充分包络着陆冲击环境的高频段部分,但是单一的冲击试验条件不能完全覆盖中低频段的着陆冲击环境,对于不能覆盖的频段这里采用其它类型的试验条件进行等效包络。
正弦振动试验条件频率范围通常为5~100 Hz,对于慢正弦扫描输入加速度A,与冲击响应谱S存在等效关系[10],即
S=QA
(1)
式中:Q为放大因子。发射段的正弦振动试验条件都可以通过这个关系式转化成等效的冲击响应谱,利用等效的正弦振动试验条件和已有的冲击试验条件可以覆盖大部分频段的着陆冲击环境。如果中频段的着陆冲击环境依然不能被覆盖,则考虑采用随机振动试验条件进行等效包络。
随机振动试验条件频率范围通常为20~2000 Hz,根据Miles公式[11],随机振动试验条件等效的冲击响应谱为
(2)
式中:R(f)为单自由度振动系统固有频率f处基础加速度的功率谱密度;系数3代表3σ的概率上限,即超过该响应的概率小于0.26%[12]。实践经验表明,利用发射段正弦振动试验条件、随机振动试验条件的等效冲击响应谱和冲击试验条件一般可以覆盖10~4000 Hz频率范围内的着陆冲击环境,若其中有部分频段不能覆盖,则可通过提高相应频段的原有试验条件来确保覆盖。
对于低于10 Hz频段的着陆冲击环境,无法被上述试验条件所覆盖。正弦振动试验条件的起始频率虽然能做到5 Hz左右,但由于振动台振动幅度有限,位移振幅一般不超过20 mm,对应的10 Hz处加速度幅值约为8gn、5 Hz处加速度幅值约为2gn,超过此量值的正弦振动试验条件难以实现。对此,本文采用加速度试验条件来覆盖。在加载速率较低时,加速度试验条件可近似转化为量值相等的平直冲击响应谱,即各固有频率的单自由度振动系统的最大响应均等于该加速度试验条件稳态值;因此,根据着陆冲击环境低于10 Hz频段范围内的冲击响应谱最大值,即可制定相应的加速度试验条件。目前,离心机能够提供的最高稳态径向加速度约在100gn左右[13],可以充分满足对着陆冲击环境低于10 Hz频段范围内等效加速度试验条件的模拟需求。
在实际制定试验条件时,需在分析和试验数据基础上加上一定的安全系数以获得极限预示环境值和最高预示环境值。根据GJB 1027A-2005[9]规定,鉴定试验用的极限预示环境值是指用90%置信度估计在至少99%的飞行次数中不会被超过(P99/90值),验收试验用的最高预示环境值是指用50%置信度估计在至少95%的飞行次数中不会被超过(P95/50值)。如果只有一次模拟真实飞行环境的分析数据或试验数据,那么P99/90值将比它高出7.21 dB,而P95/50值比它高出3.29 dB。
图3给出了按上述方法制定着陆冲击力学环境试验条件的示例,预示环境值和各类试验条件均以冲击响应谱的形式画在一张图中进行比较。可见,已有的鉴定级正弦振动试验条件、随机振动试验条件和冲击试验条件能够很好地包络10~4000 Hz频率范围内的极限预示环境值,只需针对低于10 Hz频段的极限预示环境值制定出相应的加速度试验条件即可完成对极限预示环境值的全频段包络;另外,随机振动试验条件的等效冲击响应谱通常低于正弦振动试验条件的等效冲击响应谱和冲击试验条件所构成的包络,因此简单起见,一般用冲击试验条件、正弦振动试验条件和加速度试验条件即可完成着陆冲击力学环境试验条件的制定。
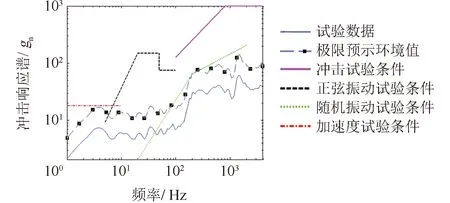
图3 着陆冲击力学环境试验条件制定示例Fig.3 Illustration of designing mechanical environmental test conditions for landing impact
实际上,本文提出的着陆冲击力学环境试验条件的分频段制定方法适用于任何具有多频段成分的瞬态冲击力学环境模拟。当瞬态冲击力学环境主要为高频段成分时,该方法退化为冲击试验条件制定方法;当瞬态冲击力学环境主要为低频段成分时,该方法退化为正弦振动试验条件制定方法。该方法为不同类型力学环境试验条件之间的相互等效比拟提供了思路。
3 巡视颠簸振动环境试验条件制定方法
巡视颠簸振动环境以周期性低频振动为主,其主要频率一般低于正弦振动试验的起振频率5 Hz,且振幅较大,对于某些工况还叠加着一定的周期性高频振动成分,因此不能用通常的加速度试验条件、正弦振动试验条件、随机振动试验条件和冲击试验条件等效覆盖。对于在月面移动过程中有工作性能要求的组件,特别是处于展开状态的柔性组件,如太阳翼、天线等,需要制定合理的巡视颠簸振动试验条件进行设计验证。
借鉴地面车辆进行道路模拟试验的方法,巡视颠簸振动试验采用道路模拟试验台[14]模拟颠簸振动的时域过程和能量,如图4所示,试验条件一般包括振幅、波形、转速、方向和持续时间等要素。下面依次介绍每个要素的制定方法。
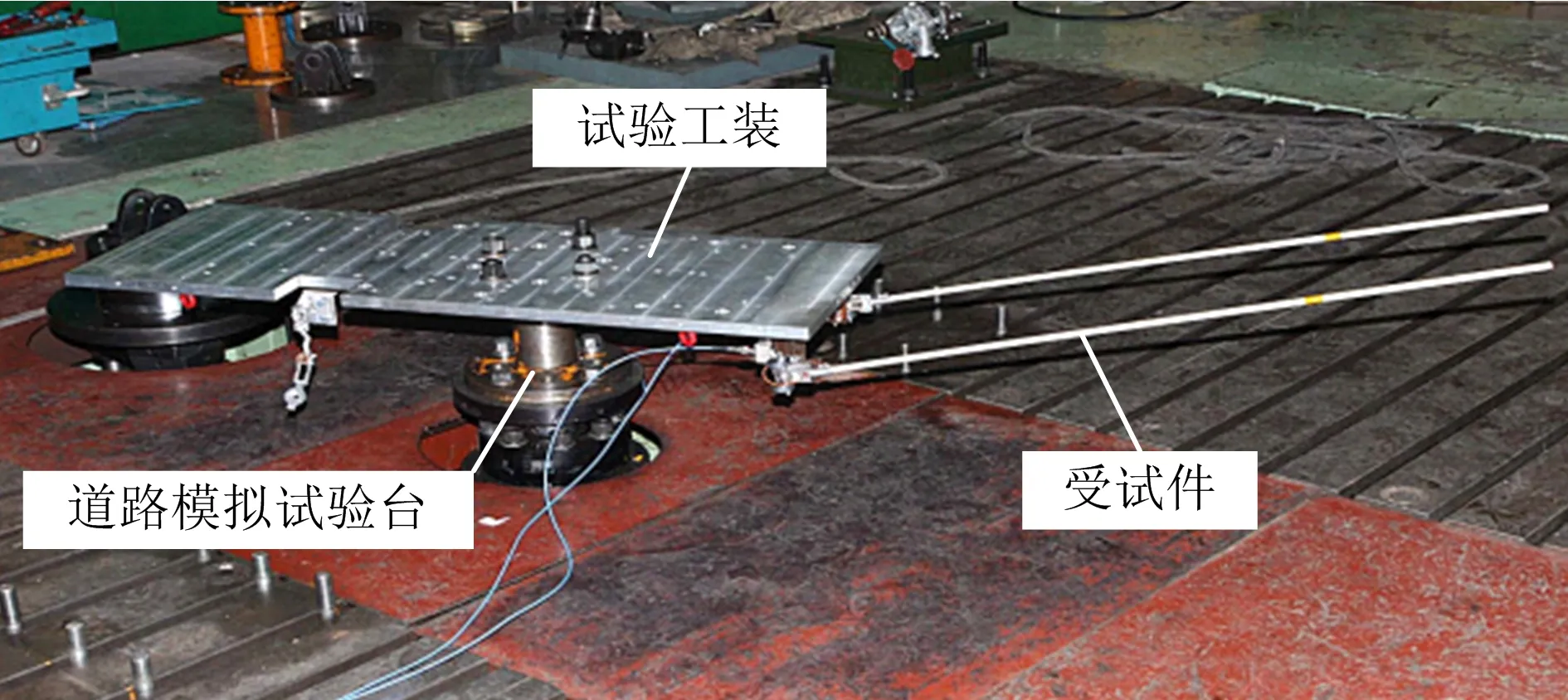
图4 颠簸振动试验示例Fig.4 Illustration of a jolt vibration test
(1)振幅:根据控制系统避障能识别的最小月面石块和凹坑尺寸,可以确定月面巡视时可能引起颠簸振动的最大坡高L,如图5所示。根据能量等效原则,受试组件从颠簸最高点到最低点的重力势能变化量等效(即mgLL=mgLT,其中m为组件质量、gL为月面重力加速度、g为地面重力加速度),推导出在地面进行颠簸试验的等效坡高LT=L/6(月面重力加速度约为地面重力加速度的1/6),故制定试验振幅为不小于L/6。
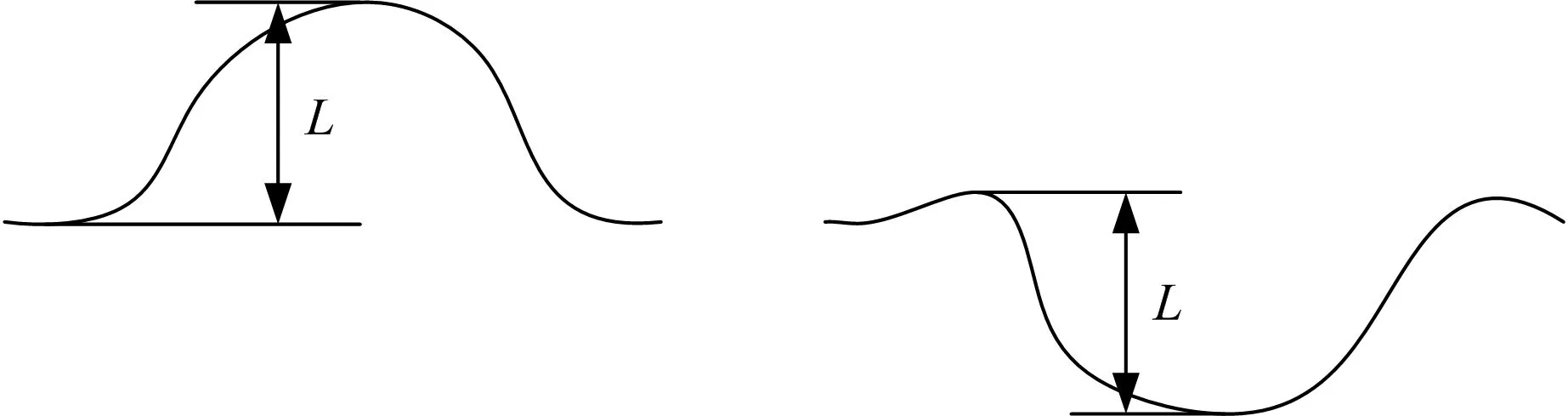
图5 月面石块和凹坑所对应的最大坡高示意图Fig.5 Illustration for the maximum height of lunar bulges and craters
(2)波形:一般采用正弦波模拟颠簸振动,如图6所示,对于极端恶劣工况或根据实际月面情况,可采用三角波、矩形波或定制波形来模拟。
(3)转速:根据巡视器最大行驶速度、月面石块和凹坑的分布距离来确定凸轮转速,即试验台凸轮在每单位时间内转过的圈数,制定过程中考虑极端颠簸情况并留有足够的安全系数。
(4)方向:模拟可能的实际颠簸方向,一般是沿着巡视器的纵向。
(5)持续时间:根据巡视器总设计行程内驶过月面石块和凹坑的最大数量、以及之前确定的转速来制定试验持续时间,确保试验颠簸总次数不少于实际颠簸总次数。

图6 典型的颠簸振动试验位移波形Fig.6 Typical displacement waveforms for a jolt vibration test
4 结束语
本文结合我国探月工程研制实践,研究了月球探测器在整个任务过程中所经历的飞行阶段和对应的各类力学环境;并针对月球探测器相对于传统航天器所特有的力学环境,包括着陆探测器在软着陆过程中经历的着陆冲击环境和巡视探测器在月面移动过程中经历的颠簸振动环境,开展了专门的分析研究,提出了工程上可行的环境模拟试验条件制定方法。此方法已成功应用于嫦娥三号和嫦娥五号月球探测器的研制过程中。通过嫦娥三号月球探测器的实际飞行验证,器上组件经历了月面着陆冲击力学环境和巡视颠簸振动环境均能正常工作,证明了环境模拟试验的充分性和试验条件制定方法的有效性。该方法亦可供其它地外天体探测器的总体设计师参考。
References)
[1] 彭成荣. 航天器总体设计[M]. 北京: 中国科学技术出版社, 2011
Peng Chengrong. System design for spacecraft[M]. Beijing: China Science and Technology Press, 2011 (in Chinese)
[2] 董威利, 刘莉, 周思达, 等. 月球探测器软着陆动力学及影响因素分析[J]. 宇航学报, 2014, 35(4): 388-396
Dong Weili, Liu Li, Zhou Sida, et al. Analysis on soft-landing dynamics and influence factors of lunar lander[J]. Journal of Astronautics, 2014, 35(4): 388-396 (in Chinese)
[3] 张伍, 党兆龙, 贾阳. 月面数字地形构造方法研究[J]. 航天器环境工程, 2008, 25(4): 301-305
Zhang Wu, Dang Zhaolong, Jia Yang. Construction method of lunar digital terrain[J]. Spacecraft Environment Engineering, 2008, 25(4): 301-305 (in Chinese)
[4] 时军委, 徐峰, 胡雪平, 等. 对接机构动力学仿真[J]. 上海航天, 2011, 28(6): 17-22
Shi Junwei, Xu Feng, Hu Xueping, et al. Docking mechanism dynamic simulation[J]. Aerospace Shanghai, 2011, 28(6): 17-22 (in Chinese)
[5] 饶天宇. 对接与样品转移机构的结构设计及动力学仿真[D]. 长沙: 湖南大学, 2013
Rao Tianyu. The structure design and dynamic simulation of the docking and sample transferring mechanism[D]. Changsha: Hunan University, 2013 (in Chinese)
[6] 王晓姝, 赵会光. 应用土壤修正模型的返回器着陆冲击响应预示[J]. 航天器工程, 2015, 24(3): 45-50
Wang Xiaoshu, Zhao Huiguang. Returnable capsule landing impact response based on modified soil model[J]. Spacecraft Engineering, 2015, 24(3): 45-50 (in Chinese)
[7] 张熇, 柳忠尧, 饶炜. 月面软着陆探测器地面力学试验方法研究[J]. 航天器工程, 2007, 16(6): 33-38
Zhang He, Liu Zhongyao, Rao Wei. Study on methods for lunar lander dynamical experimentations[J]. Spacecraft Engineering, 2007, 16(6): 33-38 (in Chinese)
[8] Smallwood D O. Improved recursive formula for calculating shock response spectra[J]. Shock and Vibration Bulletin, 1980, 51(2): 211-217
[9] 国防科学技术工业委员会. GJB 1027A-2005运载器、上面级和航天器试验要求[S]. 北京: 国防科工委军标出版发行部, 2006
Commission on Science, Technology, and Industry for National Defense. GJB 1027A-2005 Test requirements for launch, upper-stage, and space vehicles[S]. Beijing: Military Standard Publishing Department of Commission on Science, Technology, and Industry for National Defense, 2006 (in Chinese)
[10] 唐照千, 黄文虎. 振动与冲击手册第二卷:振动与冲击测试技术[M]. 北京: 国防工业出版社, 1992: 271-272
Tang Zhaoqian, Huang Wenhu. Vibration and shock handbook Volume 2: vibration and shock testing technology[M]. Beijing: National Defense Industry Press, 1992: 271-272 (in Chinese)
[11] Scharton T D. Vibration and acoustic testing of spacecraft[J]. Sound and Vibration, 2002, 36(6): 14-18
[12] 袁家军. 卫星结构设计与分析[M]. 北京: 中国宇航出版社, 2004
Yuan Jiajun. Design and analysis of satellite structures[M]. Beijing: China Astronautics Press, 2004 (in Chinese)
[13] 谭维炽, 胡金刚. 航天器系统工程[M]. 北京: 中国科学技术出版社, 2009
Tan Weizhi, Hu Jingang. Spacecraft systems engineering[M]. Beijing: China Science and Technology Press, 2009 (in Chinese)
[14] 雷达, 陈剑, 汪学岭. 汽车电器试验台道路模拟试验方法的研究与实现[J]. 噪声与振动控制, 2009, 29(4): 67-69
Lei Da, Chen Jian, Wang Xueling. Research and implementation of road simulation for automotive electric products test bed[J]. Noise and Vibration Control, 2009, 29(4): 67-69 (in Chinese)
猜你喜欢
快乐语文(2021年11期)2021-07-20
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
地震研究(2021年1期)2021-04-13
快乐语文(2020年36期)2021-01-14
快乐语文(2020年30期)2021-01-14
学苑创造·A版(2020年10期)2020-11-06
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
航天电子对抗(2019年4期)2019-12-04
小学科学(2019年12期)2019-01-06