
基于激光扫描的蔬菜种子形态特征测量方法研究
2018-02-27 11:43尹文庆杨瑞江张健华蒋丽唐黎吴思远
农业与技术 2018年24期
尹文庆 杨瑞江 张健华 蒋丽 唐黎 吴思远
摘 要:蔬菜种子的形态特征测量在评估种子质量的过程中起着重要作用,但由于蔬菜种子体积小、形状不规则,测量精度很难提高。为了实现蔬菜种子形态特征的精确测量,提出了基于激光扫描的蔬菜种子形态测量方法。利用激光扫描技术采集种子的三维点云数据,应用近邻点距离传播算法对点云进行噪声滤波处理,并采用移动最小二乘法和重采样算法进行平滑处理及漏洞修复,通过贪婪投影三角化算法构建蔬菜种子表面的三角网格模型,计算种子的体积值和表面积值,通过生成模型的OBB包围盒得出种子的长宽厚值,并与用千分尺测量的结果进行对比,计算值与人工测量值的差值均<0.1mm,相对误差均<2%。实验结果证明了基于激光扫描的蔬菜种子形态特征测量方法的准确性和有效性。
关键词:激光扫描技术;激光传感器;蔬菜种子;形态特征测量;点云数据
中图分类号:TH741 文献标识码:A DOI:10.11974/nyyjs.20181233002
引言
蔬菜是人们日常饮食中必不可少的一种食物,而蔬菜种子的优劣影响着蔬菜生产产量和品质。蔬菜种子的三维形态特征是判断种子优劣的重要依据之一,因此,种子的形态特征测量是蔬菜产业中不可缺少的环节之一。
人工测量结合科学的计算方法曾广泛应用于种子大小形状的测量中,但由于种子体积小,人工测量繁琐复杂且误差大。随着计算机图像处理技术在农业工程应用中的快速发展,由数字图像处理技术获取种子特征的方法简化了测量过程且提高了精度,由于种子形状不规则,而图像是三维景物的二维投影,并不具备复现三维景物所有几何信息的能力,且在获取图像时,受图像像素、拍摄环境、拍摄角度等因素的影响,仍会产生误差。
目前,激光扫描技术日益成熟且应用广泛。三维激光扫描仪具有高效率、高精度的特点,可以在不接触被测物体的情况下快速准确地采集到物体的三维点云数据,并输入到计算机设备中进行特征参数计算。因此,本文利用激光扫描技术获取蔬菜种子表面的点云数据,在此基础上,计算获取蔬菜种子形态特征参数。
1 激光扫描仪及原理
1.1 激光三角法原理
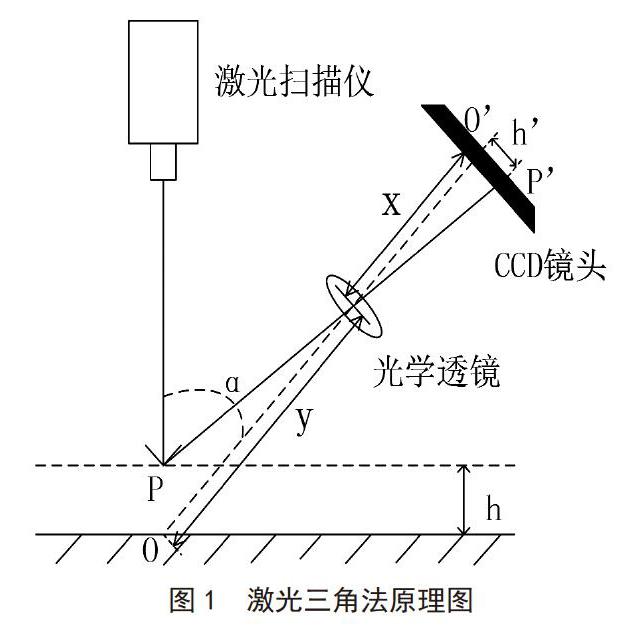
激光发生器中射出的激光由直线传播聚焦到待测物体表面并生成一个激光点,激光点经物体表面反射进入CCD镜头,CCD镜头接收后得到一个像点。待测物体表面不同的点经上述过程得到的坐标也不同,根據两点之间的对应关系,即可计算出物体表面待测点的位置高度。
如图1所示,将线型激光源投射到蔬菜种子表面,反射后的光线经过光学透镜在CCD镜头中成像,根据光路间的三角几何关系,即可测得蔬菜种子表面映射点的三维坐标。h是蔬菜种子表面映射点P相对于基准面的高度,x是光学透镜的像距,y是光学透镜的物距,α是激光线与成像光轴间的夹角,O′、P′分别是O、P两点在CCD镜头中的像点,h′为像点O′、P′的距离。
根据光路间的三角几何关系,蔬菜种子表面映射点P相对于蔬菜种子位置下方基准面的高度为:
1.2 激光扫描系统
选用的三维线激光线扫描仪,最高扫描精度可达±0.01mm。如图2所示,在系统初始化完成后,通过运动控制卡和图像采集卡驱动测量头,实现蔬菜种子表面轮廓的数字化过程,并将测得的点云数据以文本文件.txt的形式存储在计算机中,以便后续的分析处理。
2 点云数据的采集及预处理
2.1 点云配准
在种子点云采集过程中,一次扫描只能采集到种子部分表面的点云数据并且可能出现平移错位和旋转错位。为了获取蔬菜种子表面的完整信息,需要进行多次测量,根据不同蔬菜种子的不同形状特征,选取黄瓜和牛角椒种子的2个面以及黄秋葵种子的四个面分别进行测量,在采集到种子分片点云后,将种子不同面的分片点云进行配准,如下图3所示。
2.2 点云预处理
2.2.1 噪声滤波
实际中,扫描时会受到人为或随机因素的影响,如种子表面的粗糙程度、CCD镜头的振动等,导致点云数据中掺杂少量离群点。近邻点距离传播算法是利用主体点数量比离群点大得多的特点,设定点与其近邻点的距离阈值,以点与点之间距离<阈值为约束进行传播,直到点的数目计算完毕,将数目小得多的点视为离群点删除。如图4(a)所示,主体点云较远处有少量离群点,计算种子形态特征之前需去除噪声点。以黄瓜种子点云为例,图(b)为噪声点滤除效果。
2.2.2 平滑处理及漏洞修复
在噪声滤波处理中,去除的噪点是离种子点云较远的离群点,但还有一些噪声点与真实点混杂在一起,直观上表现为点云表面有很多“粗糙毛刺”,且会出现重叠层的情况,影响后续形态特征计算的精度。采用移动最小二乘法(MLS),即对权函数影响区域内节点按加权最小二乘法进行拟合,取合适的权函数来进行曲面平滑,通过重采样算法,对周围数据点进行高阶多项式插值来重建表面缺失的部分。以噪声滤波处理后的黄瓜种子点云为样本,平滑处理及漏洞修复前的点云如图5(a)所示,平滑处理及漏洞修复后的点云如图5(b)所示。
3 种子形态特征的计算
采用贪婪投影三角化算法,即将种子点云投影到二维坐标平面内,再进行平面内的三角化,根据平面内三位点的拓扑连接关系得到种子三角网格模型。图6为黄瓜种子的三角网格模型。
3.1 表面积的计算
三角网格模型由若干个三角面构成,已知每个三角形的顶点坐标,利用欧几里德距离公式可求得第i个三角形的三条边的边长分别为Ai,Bi,Ci,由海伦公式可得,第i个三角形的周长Pi=1/2(Ai+Bi+Ci),则第i个三角形面积为Si=Pi*(Pi+Ai)*(Pi+ Bi)*(Pi+ Ci),模型的总表面积S为所有三角形的面积Si之和。
3.2 体积的计算
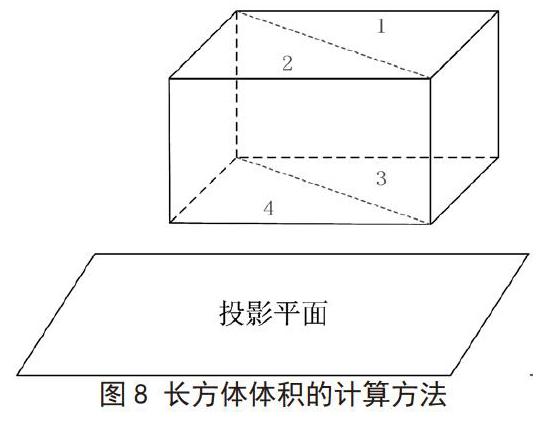
任意三角面与其指定的投影平面所围成的凸五面体称为该三角面的投影体(如图7所示),该凸五面体的体积即为三角面的投影体体积Vi,若三角网格模型的所有三角面围成的空间区域是封闭的,该模型的体积即可由所有三角面的带符号投影体体积之和计算,如图8所示,一长为a、宽为b、高为c的长方体,长方体的下底面与投影平面的距离为h,将该长方体的每个面细分成三角面,长方体体积即可由所有三角面的投影体体积之和计算,由于长方体的侧面与投影平面垂直,投影体体积为0,因此长方体体积为:
将三角网格化后的种子点云递归细分成更小的三角面片,种子体积V可由其三角网格模型中的所有三角面的带符号投影体积Vi之和来计算。
3.3 长宽厚的计算
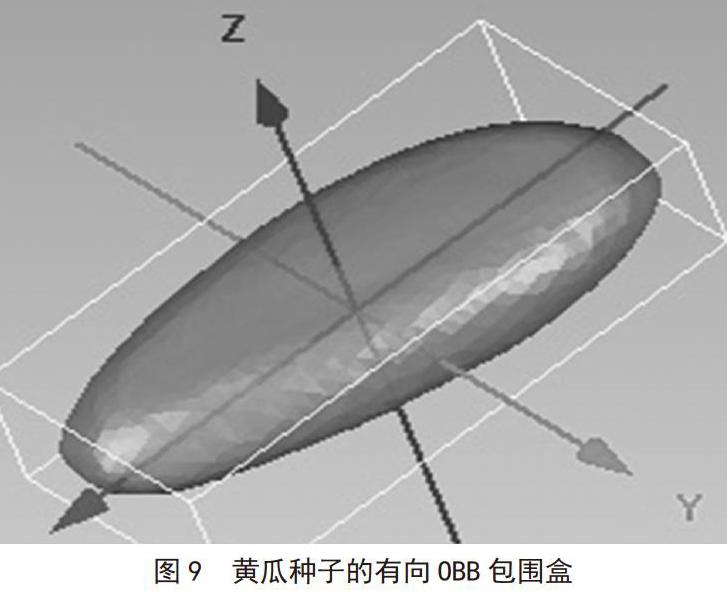
有向OBB包围盒(Oriented Bounding Box)是最贴近三维几何体的平行六面体。其位置和方向是利用模型对象顶点坐标的一阶(均值)及二阶(协方差矩阵)统计特性来计算的,其最大的特点是方向的任意性,根据被包围物体的形状特点任意旋转,如图8为黄瓜种子的有向OBB包围盒。
种子的长L、宽W、厚H即为包围盒的长宽高,分别对应x、y、z坐标值的最大值与最小值之差,即xmax-xmin、ymax-ymin、zmax-zmin。
4 结果和分析
4.1 体积与表面积
选取黄瓜种子、牛角椒种子、黄秋葵种子各20颗作为试验样品,采集种子表面点云并计算每颗种子的体积V和表面积S,结果如图10所示。
由于蔬菜种子表面不光滑且形状不规则,真实值难以测量,为了验证该方法的有效性,选取与实验种子形状相近的规则椭球体和球体(如图12所示,a=4.3mm,b=1.2mm,c=2.1mm,r=2.2mm)进行计算,并与其真实值进行分析对比,结果如表1所示,相对误差(取绝对值)在1.5%左右,验证了体积表面积算法的有效性。
4.2 长宽厚
选取黄瓜种子、牛角椒种子、黄秋葵种子各20颗作为试验样品,采集种子表面点云并计算每颗种子的长L、宽W、厚H,结果如图13至15所示,将计算的结果与用千分尺测量的结果进行分析对比,黄瓜种子的长宽厚计算值与人工测量的实际值最大差值分别为0.09mm、0.09mm、0.10mm,牛角椒种子的长宽厚计算值与人工测量的实际值的最大差值分别为0.09mm、0.09mm、0.10mm,黄秋葵种子的长宽厚计算值与人工测量实际值的最大差值分别为0.07mm、0.08mm、0.08mm,种子的长、宽、厚计算值与人工测量值的差值均<0.1mm,相对误差均<2%。结果证明了基于激光扫描的蔬菜种子形态特征测量方法的有效性。
5 结论
以种子的完整三维点云为基础,采用贪婪投影三角化法构建蔬菜种子的三角网格模型,计算种子的体积值和表面积值,并利用对规则椭球体和球体的表面积、体积的测量验证了该方法的有效性。
通过生成种子模型的OBB包围盒得出种子的长宽厚值,并与用千分尺测量的结果进行对比,计算值与人工测量值的差值均<0.1mm,相对误差均<2%,结果证明了该方法的准确性和有效性。
参考文献
[1]张义君.豆科种子鉴别方法的研究Ⅲ、种子大小的测量和表示方法[J].种子,1984(4):32-35.
[2] Myeong H.Kim,Eun G.Choi,Gyeong Y.Baek,Chi H.Kim,Byeong O.Jink,Byeong E.Moon,Byeong E.Moon,Dong E.Kim,Hyeon T.Kim.Lettuce growth prediction in plant factory using image processing technology[J].IFAC Proceedings Volumes,2013,46(4):62-67.
[3] Qiu Hong Ke,Jun Mei Zhang,YeTian.Arabidopsis Growth Analysis Using Image Processing Technology[J].Advanced Materials Research,2013,2450(712):271-313.
[4]李錦卫,廖桂平.基于数字图像处理的油菜种子形状特征参数提取及模糊聚类分析[J].计算机辅助工程,2006(3):75-78.
[5]戈广双,李子龙,杨凯,马瑞鑫.基于激光扫描测距的机器人粒子滤波定位技术研究[J].传感器与微系统,2017,36(12):36-39.
[6]杨明珠.基于三维激光扫描点云数据特征点提取及建筑物重建[D].昆明:昆明理工大学,2017.
[7]章金敏.基于激光三角法的物体三维轮廓测量系统[D].武汉:武汉理工大学,2015.
[8]曹鹏,尹文庆,吴林华,等.基于激光传感器的稻种轮廓形状测量方法研究[J].传感器与微系统,2017,36(3):29-32.
[9]郝慧丽,刘先勇.含噪点云预处理技术研究[J].微型机与应用,2012,31(12):68-70.
[10]吴晓庆,黄玉清.基于移动最小二乘法的点云平滑及重采样[J].微型机与应用,2017,36(11):47-49,53.
[11]朱化红.基于Delaunay生长法的三维点云曲面建模研究[D].成都:成都理工大学,2016.
[12]张小青.基于三角网格模型的文物几何信息计算[D].北京:北京建筑工程学院,2012.
[13]王泉德.任意三角网格模型体积的快速精确计算方法[J].计算机工程与应用,2009,45(18):32-34,58.
[14] S.E.Kim,J.K.Han,J.G.Kim.An efficient scheme for motion estimation using multireference frames in H.264/AVC[J].IEEE Trans Multimedia,2006,8(3):457-466.
作者简介:尹文庆,湖北人,男,教授。
猜你喜欢
江西农业(2021年6期)2021-12-07
今日农业(2020年22期)2020-12-14
现代园艺(2017年22期)2018-01-19
科技创新与应用(2017年3期)2017-02-18
科技与创新(2015年15期)2015-08-04
科技与创新(2015年12期)2015-07-21
长江蔬菜(2013年23期)2013-03-11
