
基于DSP的自适应弱小目标检测方法
2018-02-27 03:06李天甲许四祥姚志生
计算机应用与软件 2018年1期
李天甲 许四祥 姚志生 王 洋
(安徽工业大学机械工程学院 安徽 马鞍山 243002)
0 引 言
弱小目标因其成像面积小,信噪比小,极易淹没在复杂背景杂波中[1-2],因此弱小目标的检测一直是图像处理领域的热点和难点。传统应用于镁合金熔液中弱小目标检测的算法如自适应背景预测法[3]、基于支持向量机法[4]、小波变换图像融合法[5]等多局限于MATLAB软件仿真。随着DSP芯片运算速度、集成度、数据处理能力等性能的不断提高,基于嵌入式DSP的图像处理系统在弱小目标检测方面取得较好的应用,使传统MATLAB算法应用于基于DSP的嵌入式图像处理平台上成为可能。如李正周等[6]在DSP平台实现了对序列图像弱小运动目标的检测,文献[7]采用中值滤波算法在DSP检测平台上实现镁合金熔液弱小目标的检测。但文献[7]中算法的稳定性和实时性存在不足。因此,本研究在DSP图像处理系统平台上,设计一种基于DSP的自适应背景检测算法,应用于镁合金镁熔液中弱小目标检测,取得了较好的效果。
1 DSP图像处理系统平台
本研究采用的DSP图像处理系统平台所使用的芯片是TMS320DM642(简称DM642)。它是TI公司推出的一款32位定点DSP芯片,采用TI公司第二代增强型超长指令字(VLIW)结构,在主频720 MHz下处理速度能达到5 760 MIPS,具有高实时性和高稳定性等特点[8],达到了弱小目标实时检测的硬件要求。且DM642芯片中的EMIF接口数据总线宽度为64位,可直接与大容量SDRAM芯片无缝连接[9],为大量图像数据提供了存储空间。DSP图像处理系统平台如图1所示。
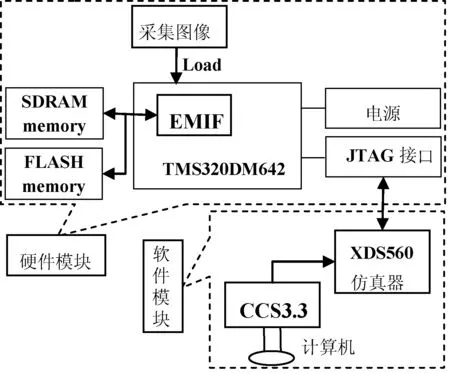
图1 DSP图像处理系统平台
该平台由软件模块和硬件模块两部分组成。硬件模块以DM642为核心,通过EMIF总线外扩了一个256 MB SDRAM的存储器和一个32 MB的FLASH存储器,且通过JTAG接口与仿真器连接,并将采集的图像下载到EMIF的SDRAM中,等待程序处理。软件模块以集成开发软件Code Composer Studio 3.3 (简称CCS3.3)为编程载体,通过仿真器与硬件模块连接组成一个完整的系统平台。该平台图像处理过程为:
(1) 初始化硬件模块和软件模块,并编写检测算法。
(2) 在CCS3.3开发环境下,利用Compiler工具编译程序生成.OUT文件。
(3) 通过USB接口连接的XDS560仿真器将生成的.OUT文件下载到DM642芯片的RAM中,运行程序处理SDRAM中的图像。
(4) 分析处理结果。
2 检测算法
2.1 自适应背景预测算法
背景预测是根据目标点在整幅图像中灰度值不是最大但在局域范围内灰度值最大的特性提出。用局域范围内的背景点预测出一帧不含目标的背景预测图像,用原始图像减去背景预测图像即可消除大部分背景,从而得到含有目标的图像。
自适应背景预测根据当前像素点水平领域、垂直邻域的像素点灰度值之差与预先设定的阈值P差异选择不同的背景预测模型。若灰度差大于阈值P,则背景灰度值起伏较大,该像素点可能为目标点,采用预测窗口较大的分块权值背景预测模型[10]进行预测提高目标点的灰度值。若灰度差小于阈值P,则背景较均匀,该像素点可能为背景点,为了使背景预测值接近背景实际灰度值同时减少算法运算量,采用背景预测窗口较小的固定权值背景预测[11]进行快速预测。本研究的自适应背景算法对图像进行背景预测时,针对图像本身灰度特性,选取不同的模型进行预测,不仅起到了抑制背景杂波和突出目标点对比度的作用,而且减少了算法运算量,更有利于实时性能的提高。
2.2 检测算法流程
该方法首先对连续四帧图像进行预处理,得到四帧残差图,对得到的残差图交叉差分得到两帧差分图像。其次对两帧差分图像进行自适应阈值分割得到两帧二值图像,对两帧二值图像进行逻辑“与”操作得到一帧二值图像。最后采用形态学开运算,完成弱小目标的检测。检测算法流程如图2所示。

图2 检测算法流程图
Setp1预处理。读取四帧连续图像,图像A和图像B分别为弱小目标析出前的连续两帧图像,图像C和图像D是目标析出后的连续两帧图像,其中圆圈代指目标。对读取的连续4帧图像进行自适应背景预测,得到四帧预测图像,原始图像与得到的预测图像作帧差运算,最终得到4帧预测残差图像。其中阈值P取19。
Setp2交叉差分运算。对得到的4帧预测残差图进行交叉差分运算,得到两帧差分图像。镁合金熔液中弱小目标经历了从无到有的过程,采用交叉差分运算可以实现弱小目标的定位检测。
Setp3自适应阈值分割。阈值分割即通过设置门限阈值T将图像中像素点的灰度值设置为0或255,使图像呈现出明显的黑白效果[8],同时阈值分割消除了经过交叉差分图像中的类目标点和噪声点。根据图像特性进行自适应阈值选取,即阈值T=mean+λσ,其中,mean为图像的均值,σ为图像的均方差,λ为阈值分割加权系数,通常取2~15,本研究λ取4.5。
Setp4逻辑“与”操作。对经过自适应阈值分割后的二值图像进行逻辑与“与”操作,可消除一些仅在单帧图像中出现的虚警点。
Setp5形态学开运算。形态学开运算包括腐蚀和膨胀两步,先对逻辑“与”操作后的图像进行腐蚀操作去除比结构元素小的杂点和噪声点,再进行膨胀操作还原目标区域的灰度级[12],获得最终检测结果。本研究选用结构元素为3 Pixel×1 Pixel垂直结构元素。
3 实验结果分析
本实验利用构建的DSP图像处理平台,在集成开发软件 CCS 3.3上采用C语言编写弱小目标检测程序,编译成功后生成.OUT可执行文件。通过仿真器把生成的可执行文件下载到DSP芯片的RAM中,并在CCS中运行Main程序,对目标析出前的三帧原始图像和目标析出后的一帧原始图像进行仿真实验。图像大小为560 Pixel×530 Pixel,CCS3.3集成开发软件是在Intel(R)Core(TM)i5-3210M的PC机上运行的,主频2.5 GHz,内存2 GB。
在相同实验条件下,将文献[7]中提到的中值滤波算法和自适应背景预测算法分别应用于本研究的检测中。分别实验50次,并将对两种算法在目标面积、虚警次数、预处理的时间三个方面进行对比,目标点面积由目标点所占像素的个数来体现,目标点所占像素个数越多,则目标点面积越大,越能体现目标点真实大小。两种算法的图像检测性能对比见表1,表1中数据是50组实验数据的平均值。

表1 两种算法的图像检测性能对比
从表1中可看出:与中值滤波算法相比,自适应背景预测算法对四帧图像预处理时间缩短了3.65 s,算法速度得到提高;检测到的目标面积增加了4个像素点,有利于目标点的观察;在50次试验中,中值滤波算法出现3次虚警,虚警概率[13]为6%,而本研究算法50次全部检测到目标,没有虚警,检测率为100%。说明自适应背景预测算法稳定性和准确性更强,更有利于复杂背景下弱小目标的检测。图3为目标析出前的原始图像,图4为目标析出后的原始图像,图5为检测结果,其中白色方框内为弱小目标。
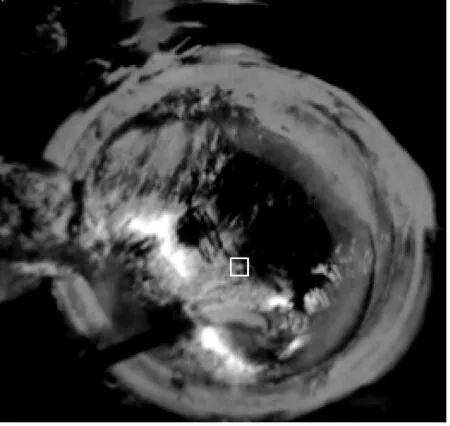
图4 目标析出后的原始图像
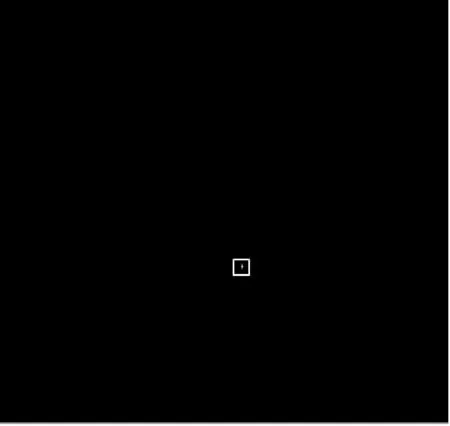
图5 检测结果
4 结 语
1) 提出的基于DSP的自适应背景预测检测方法,应用于镁合金熔液中弱小目标的检测,能快速有效地检测到弱小目标。
2) 在DSP图像处理系统平台上,自适应背景预测算法与中值滤波算法相比,预处理时间减少22%。目标面积增大了2.3倍,更便于目标点的观察。同时,虚警率降低了6%,检测率为100%,为图像处理应用于复杂背景下弱小目标实时检测提供了新的方向。
[1] 管志强,陈钱,钱惟贤,等.一种基于算法融合的红外目标跟踪方法[J].光学学报,2008,28(5):860-865.
[2] 杨琳娜,安玮,林再平,等.基于空间距离改进的视觉显著性弱小目标检测[J].光学学报,2015,35(7):0715004.
[3] 刘腾飞,许四祥,冯在东.基于自适应背景预测的镁熔液第一气泡检测算法[J].特种铸造及有色合金,2012,32(1):89-92.
[4] 张炳刚,许四祥,侍海东.基于支持向量机的镁熔液弱小目标检测[J].特种铸造及有色合金,2015,35(8):886-889.
[5] 张炳刚,许四祥,侍海东.基于小波变换图像融合的镁熔液弱小目标检测[J].安徽工业大学学报,2015,32(1):55-59.
[6] 李正周,田蕾,郑微.基于DSP的序列图像弱小运动目标检测[J].计算机技术与应用,2011,37(7):134-137.
[7] 侍海东,许四祥,王忍宝.基于DM642图像处理的镁熔液第一起泡检测[J].铸造,2015,64(5):437-439.
[8] 赵小强.DSP原理及图像处理应用[M].北京:人民邮电出版社,2013:26.
[9] 许永辉,杨京礼,林连雷.TMS320DM642DSP原理与应用实践[M].北京:电子工业出版社,2012:12-13.
[10] 陈振学,汪国有.基于自适应背景预测的红外弱小目标检测算法[J].激光与红外,2005,35(8):608-610.
[11] 朱斌,樊祥,马东辉,等.基于固定权值背景预测的红外弱小目标检测[J].舰船电子对抗,2008,31(1):54-56.
[12] 冈萨雷斯.数字图像处理 [M].阮秋奇,译.北京:电子工业出版社,2007:449.
[13] 徐军.红外图像中弱小目标检测技术研究[D].西安:西安电子科技大学,2003.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
网络安全与数据管理(2022年2期)2022-05-23
现代临床医学(2022年2期)2022-04-19
天津医科大学学报(2021年1期)2021-01-26
雪豆月读·高年级(2020年2期)2020-09-10
中国信息技术教育(2020年2期)2020-02-02
电子制作(2019年15期)2019-08-27
电子制作(2019年15期)2019-08-27
飞天(2018年8期)2018-10-29
红领巾·萌芽(2015年1期)2015-04-10
