纯延时滤波器提取高频注入响应在无位置传感器IPMSM系统中的应用
2018-02-03 07:14:53刘庆飞
电源学报 2018年1期
王 涛,刘庆飞
(1.河北科技大学资产管理处,石家庄050018;2.天津大学电气自动化与信息工程学院,天津 300072)
永磁同步电机PMSM(permanent magnet synch-ronous motor)无位置传感器控制技术大致可以分为两类,一类是基于电机反电动势来估计转子位置[1-4],但在低速和零速时,反电势很小或者为0,无法准确检测电机的转子位置和转速,因此这类方法只适用于中高速运行。另一类是通过提取高频注入响应追踪电机转子的空间凸极得到转子位置的方法[5-8],可实现电机在零速和低速时的转子位置的有效检测,对电机参数的变化不敏感,具有较好的鲁棒性,如旋转高频信号注入法[5-6]、脉振高频信号注入法[7]、方波信号注入法[8]等。内埋式永磁同步电机IPMSM(interior permanent magnet synchronous motor)转子具有凸极结构,适合用旋转高频信号注入法实现无位置传感器控制[9-11]。
利用高频信号注入法实现永磁同步电机无位置传感器控制有3个主要环节:一是从电机定子电流中提取含有转子位置信息的高频响应信号;二是利用观测器估计出转子凸极的位置和转速;三是检测转子磁极极性,对转子磁极位置和凸极位置的角差进行修正。为限制系统噪声,实际中高频注入响应信号的幅值一般都很小,在信息提取的过程中,如何选择合适的信号提取方法,提高信噪声比SNR(signal to noise ratio)、尽量减小相位滞后是问题的关键。文献[12]采用同步旋转二阶巴特沃斯带通滤波器和二阶巴特沃斯低通滤波器等实现转子位置信息的提取;文献[13]介绍了从定子电流中提取信噪比极低的高频负序电流的数字滤波器的设计方法。这些滤波器或者参数设计复杂,或者会带来有效信号的幅值衰减和相位滞后,会影响到转子位置的观测精度。
在利用观测器对转子位置进行估计的环节,主要采用锁相环观测器[14],锁相环的参数对观测精度和鲁棒性有较大的影响。目前大多数的文献采用极点配置法[15]或从观测器相角裕度[16]出发设计锁相环的参数,未能充分阐述锁相环带宽与转速环带宽的匹配关系,而不适当的锁相环带宽会对位置和转速的估计精度、噪声以及动态过程带来明显的影响。
本文首先简单阐述了通过提取高频注入响应追踪电机转子空间凸极得到转子位置的基本原理,本文的主要贡献是对信号的提取过程进行了改进,提出了应用串联纯延时滤波器和同步轴纯延时滤波器提取高频注入响应、滤除正序分量进而提取转子位置信息的方法。在此基础上,采用对高频负序电流进行标幺化的锁相环进行转子位置和转速观测,在系统设计中根据最小闭环谐振峰值设计准则设计锁相环的参数。最后,系统实验结果证明了所给方法的有效性和实用性。
1 永磁同步电机无位置传感器控制方法
1.1 旋转高频电压注入法
在转子永磁体定向dq坐标系下,PMSM的电压方程为

式中:ud、uq和id、iq为dq坐标系下的电压和电流分量;Rs为定子电阻;Ld、Lq分别为定子的 d、q轴电感;ωr为转子电角速度;Ψf为转子永磁体磁链;p为微分算子。
将式(1)变换到αβ两相静止坐标系下,可得
设在静止坐标系α、β轴上注入的高频电压信号为

式中,uαi、uβi和 iαi、iβi为 αβ轴系下的高频电压和高频电流分量,下标“i”表示高频分量。 如无特殊说明,各信号的相位均以高频注入电压信号的相位为参考零点。
当电机中注入的高频电压频率远大于电机定子的基频频率ωr、感抗远大于阻抗时,则注入的高频电压和由此产生的高频电流间的关系为

式(4)可以改写为
把式(3)代入式(5),得高频电流的稳态响应为

式中:Ipi为正序高频电流的幅值为负序高频电流的幅值,

由式(6)和式(7)可以看出,高频电压激励出的电流中包含正序电流分量和负序电流分量,其中只有负序电流分量中含有转子位置信息,须采用合适的信号处理技术提取负序高频电流分量,实现转子位置的观测。
1.2 基于纯延时滤波器的信号提取处理方法
在高频注入无位置传感器IPMSM系统的定子电流信号中,除高次谐波外,只含有基频电流、高频正序电流分量和高频负序电流分量,其中,基频电流的频率 ωr(t)<<ωi,高频正序电流分量的频率为常值ωi,负序电流分量的频率为ωi-2ωr≈ωi。根据前面的分析,为从电机定子电流信号中提取负序高频信号,本文采用静止坐标系下和注入高频电压同步旋转参考坐标系下的纯延时滤波器,分别来滤除电机定子电流中的基频电流分量和正序高频电流分量。
1.2.1纯延时滤波器提取高频电流分量
图1所示为静止坐标系下两级串联的纯延时

图1 串联纯延时滤波器原理Fig.1 Principle of cascaded time-delay filter
进一步表示成相量的形式为滤波器[17]CTDF(cascaded time delayed filter),将采样电流iα、iβ延迟高频注入电压信号的半个周期(τ= π/ωi),通过定子电流信号与延时后的电流信号做差,滤除定子电流信号中的基频电流信号,得到幅值倍增的高频响应电流信号。
单个纯延时滤波器的频率特性为

式中,τ=π/ωi。单个纯延时滤波器的幅频特性曲线和相频特性曲线如图2所示。

图2 纯延时滤波器传递函数的幅频、相频曲线Fig.2 Magnitude-frequency and phase-frequency curve of the transfer function of time-delay filter
从图2可以看出,纯延时滤波器的特点是,可以有效地提取信号中频率为ωi=π/τ或频率在其附近的谐波分量(如图2中的A点),相位位移小,且使幅值倍增,同时可以有效地滤除低频和直流信号分量(如图2中的B点)。可以认为,经过两次延时滤波处理,基频电流信号几乎完全被滤除,而高频响应电流信号的幅值却增大了4倍,提升了高频信号的信噪比。
在无位置传感器IPMSM系统中,总希望用较小的注入高频电压在电流中获取转子位置信息。纯延时滤波器对低频信号的滤除和对指定频率高频信号的提取倍增功能,可以在有效地信号处理的同时,大幅度地减小电机的转矩脉动和系统噪声。
传统信号处理方法中常用二阶带通滤波器实现高频电流信号的提取,为了取得较好的选频特性,带通滤波器的品质因数Q较大。本文注入的高频电压信号频率为400 Hz,所以设计二阶带通滤波器的中心频率为 400 Hz。以带宽为 [380 Hz,420 Hz]、Q为10、谐振频率处的增益为2为例,带通滤波器的传递函数为

上述二阶带通滤波器与纯延时滤波器的频率特性对比情况如图3所示。由式(6)知道,高频响应电流的频率会随电机转速的变化在ωi附近变化。而带通滤波器在ωi处的幅频特性比较“尖”,相频特性比较“陡峭”,选频特性好带来的问题是对高频响应电流频率的变化敏感,提取出的高频信号失真大,不利于信号恢复。纯延时滤波器在ωi附近的幅频特性比较“平滑”,相频特性线性变化,且近似为0,提取到的高频响应电流信号失真小。
1.2.2纯延时滤波器提取高频电流负序分量
如前所述,高频电流中只有负序分量含有转子位置信息,为此必须滤除正序分量,正序分量的角频率是固定的,将滤除基频分量的定子电流信号变换到和注入电压同步旋转的同步坐标系下,则高频响应电流中的负序分量频率变为2ωi,而正序分量变为直流量,同样可以用纯延时滤波器来滤除。
同步轴纯延时滤波器 SRFTDF(synchronous reference frame time delayed filter)如图4所示,首先通过坐标变换把静止坐标系中的高频电流iαi、iβi变换到与注入高频电压同步旋转的参考坐标系中;然后把坐标变换后的电流信号延迟τ=π/2ωi,再与延迟之前的电流信号做差,滤除直流量(正序电流在注入高频电压同步旋转的参考坐标系下为直流量),而负序分量的幅值倍增2倍;最后通过坐标反变换得到静止坐标系中的高频负序电流分量。
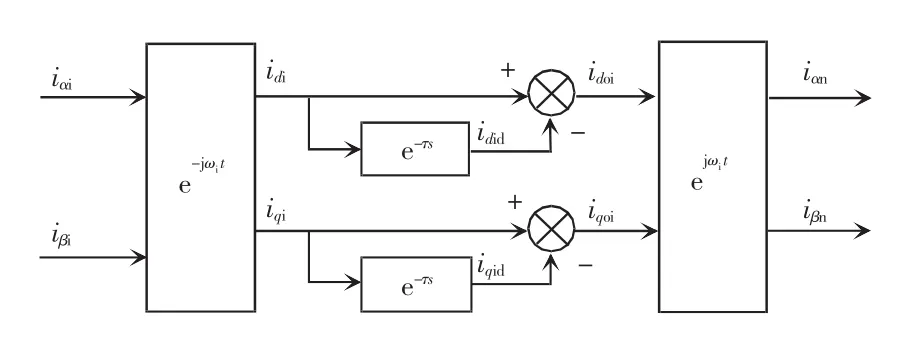
图4 同步轴纯延时滤波器原理Fig.4 Principle of time-delay filter in synchronous reference frame
对高频电流进行串联纯延时滤波器处理,得到幅值倍增4倍的注入高频响应电流;再经过同步轴纯延时滤波器滤波处理,最后得到幅值倍增8倍的高频负序电流,即
式中,iαn、iβn为静止坐标系中的高频负序电流。
传统信号提取方法中通常用同步轴高通滤波器从高频响应电流信号中提取出高频负序电流信号,本文给出了同步轴纯延时滤波器与同步轴高通滤波器的对比实验。本文注入高频电压的频率为400 Hz,故在注入电压同步旋转的同步坐标系下高频负序电流分量的频率约为800 Hz,为了使滤波后的信号失真较小,设计高通滤波器的通带角频率为100 rad/s,则高通滤波器的传递函数为

2 基于锁相环的转子位置观测器
在获取了含有转子位置信息的高频负序电流信号后,采用锁相环对转速和转子位置进行观测,基于锁相环的转子位置观测器框图如图5所示。

图5 基于锁相环的转子位置观测器框图Fig.5 Block diagram of the rotor position observerbased on phase-locked loop
2.1 锁相环原理
数字锁相环由外差运算实现鉴相器功能,对转子位置信息进行解调,得到转子位置误差信号为

式中:θr为实际转子位置;r为估计转子位置。分析纯延时滤波器的频率特性可知,采用纯延时滤波器虽然可以有效地滤除定子电流中的低频分量,提取注入高频响应电流, 但对iαni、iβni所含高频测量噪声,例如PWM开关噪声没有滤除效果。为此,在锁相环中引入一惯性环节,对高频噪声进行滤波处理,如图5虚线框内所示。除可以有效地滤除噪声外,惯性环节的带宽应是锁相环带宽的3~5倍。在本设计中,和系统最高转速相对应,2ωr≈151 rad/s,故可以选择1/T=300 rad/s。
2.2 标幺化锁相环参数设计
首先分析锁相环未进行标幺化时的性能,当锁相环进入相位“锁定”时,满足r≈θr,则
图6 锁相环等效原理框图Fig.6 Equivalent block diagram of phase-locked loop
令k=16Ini,锁相环的等效原理框图如图6所示。根据图6,建立锁相环的开环传递函数为
式中:Kp=16Inikp;Ki=16Iniki。
分析式(16)可知,Kp、Ki的大小受高频负序电流幅值的影响,在确定注入高频电压的幅值和频率后,高频负序电流的幅值主要受电机电感的影响,随着电机负载的增加,受磁路饱和的影响,一般认为d轴电感为常数,而q轴电感随着负载的增大而减小,从而引起负序电流幅值变化,导致影响锁相环的性能不断变化,这是位置观测系统不希望出现的现象。
为了消除上述不利因素的影响,本文对锁相环进行标幺化设计,即
锁相环标幺化设计后,锁相环开环传递函数为

易知锁相环的性能不受高频负序电流幅值变化的影响,从而便于锁相环参数设计。根据典型II型系统设计锁相环系统的参数,则有

式中:K=ki,τ=kp/ki。
为了使锁相环系统稳定,设计参数τ>T,当K和τ取值合适时,可以使得锁相环传递函数的开环对数幅频特性以-20 dB/dec的斜率穿越零分贝线,且幅值交接频率满足1/τ<ωc<1/T,令ωα=1/τ、ωβ=1/τ,根据典型II型系统的对数幅频特性曲线可得到

可以根据工程上常用的最小闭环谐振峰值设计准则(Mrmin设计准则)来设计锁相环的参数,由Mrmin设计准则可以得到

矢量控制系统要求锁相环转子位置观测器具有超调小、响应迅速的特点,根据工程经验一般选择h=5。由第2.1节分析得ωb=1/T=300 rad/s,则有ωa=ωb/h=60 rad/s,由式(25)可得ωa=180 rad/s。
根据上面的分析,由式(19)可计算锁相环的参数为

把这组参数作为锁相环的初始参数,在实验过程中,根据实验效果再对锁相环的参数进行调整。
3 仿真结果
为了验证上述控制算法的有效性,用Matlab软件进行了仿真验证,仿真用永磁同步电机参数为:额定功率0.07 kW,额定电压140 V,额定电流0.5 A,额定频率12 Hz,额定转矩3.7 N·m,额定转速180 r/min,永磁体极对数4,定子电阻Rs=28 Ω,Ld=0.123 H,Lq=0.218 H,注入高频电压幅值为30 V,频率为400 Hz。仿真过程中永磁同步电机采用无位置传感器闭环矢量控制,仿真结果如图7和图8所示。
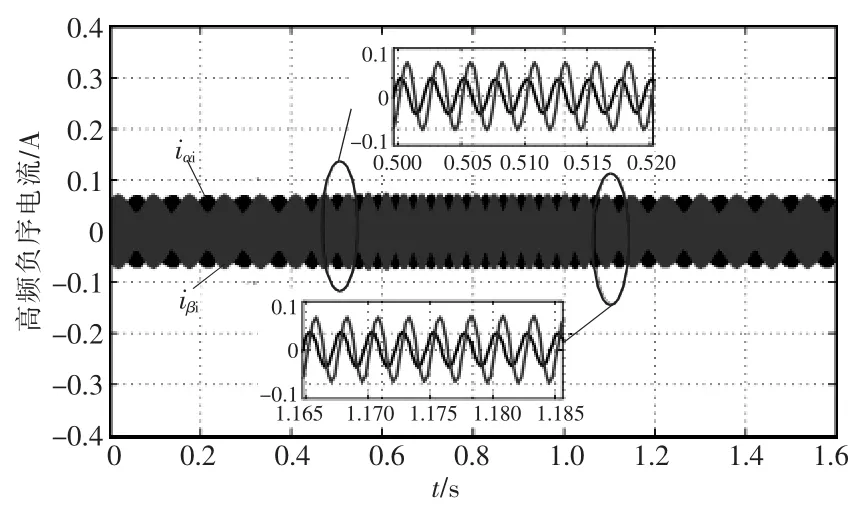
图7 高频响应电流波形Fig.7 Waveforms of high frequency currents

图8 转速和转子位置波形Fig.8 Waveforms of motor’s speed and position
电机以10 rad/s机械转速启动后,增速到20 rad/s,然后降速到10 rad/s。变速过程中串联纯延时滤波器提取到的高频响应电流的波形如图7所示;电机转速和转子位置波形如图8所示。从图7可以看出,纯延时滤波器可以很好地从测量电流中提取出高频响应电流,变速过程中一直处于稳定状态,并且具有很快的收敛速度。从图8可以看出,电机启动后估计转速能够很好地跟踪给定转速,转子位置误差较小;变速过程中估计转速和转子位置均能快速、稳定地跟踪实际转速和转子位置,具有很好的动态性能和稳定性。可见本文提出的控制策略可以满足IPMSM无位置传感器运行要求。
4 实验结果
构建实验平台对本文提出的控制策略进行实验研究,IPMSM无位置传感器矢量控制框图如图9所示,永磁同步电机实验用参数与仿真中的电机参数相同。

图9 IPMSM无位置传感器矢量控制框图Fig.9 Block diagram of sensorless IPMSM vector control system
电机由IGBT/Diodes开关管构成的电压源型逆变器供电,功率开关管频率为16 kHz,死区时间为2 μs;通过TI公司的TMS320LF2407A来实现控制算法,选用TBC05SY电流传感器进行定子电流采样,采用HAD-CXB/4096绝对磁电编码器检测实际转子位置,绝对式编码器只用作实验对比。注入高频电压幅值为30 V、频率为400 Hz,矢量控制中转速环采样周期为10 ms,电流环采样周期为62.5 μs,转速环PI参数为kpsd=150、kisd=9,锁相环 PI参数为kpll=120、kill=15 000,永磁同步电机采用无位置传感器矢量控制运行,实验波形均是通过横河DL1640L型示波器获取。实验结果如图10~图15所示。
图10为电机运行给定转速60 r/min的实验波形。图10(a)为采样电流经过串联纯延时滤波器提取的高频电流波形,从图中可以看出iαi与iβi相位互差π/2,幅值交替变化,与理论分析吻合。图10(b)为高频电流快速傅里叶变换分析的结果,从图中可知频率为400 Hz的高频电流的幅值很大,其他频率的幅值很小,证明本文设计的串联纯延时滤波器能够很好地从定子采样电流中提取注入高频响应电流。

图10 高频电流实验波形Fig.10 Experimental waveforms of high-frequency currents
图11为电机运行给定转速60 r/min时负序高频电流实验波形,图11(a)、图11(b)为同步轴纯延时滤波器提取的负序高频电流波形及其快速傅里叶变换分析结果;图11(c)、图11(d)为同步轴高通滤波器提取的负序高频电流及其快速傅里叶变换分析,通过DL1620型示波器,把电流波形保存为. CSV格式数据,该文件对电流波形进行离散采样,得到10 000个电流数据,将这些数据导入MATLAB变量空间中,然后用MATLAB进行波形分析,最后得到高频电流的频谱图。对比图11(a)和图11(c)可以看出,相比于普通高通滤波器提取的负序高频电流,纯延时滤波器提取的高频电流的幅值更大,波形更好,增加了负序高频电流的信噪比;对比图11(b)和图11(d),可以看出,纯延时滤波器提取的负序高频电流的谐波含量相对与普通高通滤波器少的很多,并且高频负序电流的幅值远大于谐波分量的幅值,能够显著增加转子位置观测器的抗干扰能力。
图12为给定转速为-60 r/min,采用纯延时滤波器和普通滤波器提取转子位置对比实验结果,图中波形为负序高频电流和转子位置实验波形。前1.25 s为普通滤波器提取的高频负序电流和转子位置,后1.75 s为纯延时滤波器提取的高频负序电流和转子位置,可以看出相比于普通滤波器,纯延时滤波器可以得到信噪比更大的负序高频电流,使用纯延时滤波器得到的观测转子位置能够更好地跟踪实际转子位置,位置观测误差较小。
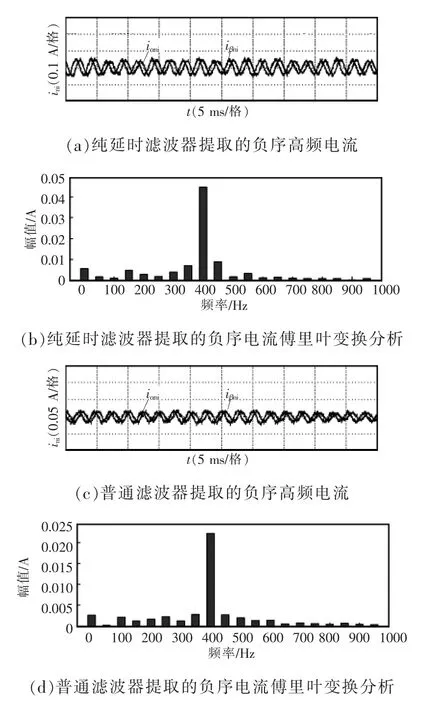
图11 负序高频电流波形Fig.11 Waveforms of negative-sequence high-frequency currents
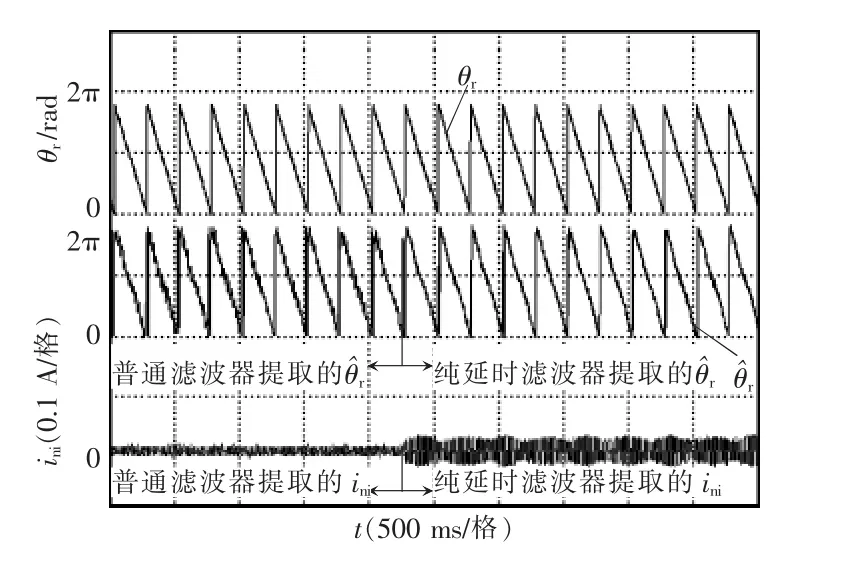
图12 两种滤波器实验结果对比Fig.12 Comparison of experimental results between two filters
图13为给定转速为60 r/min时电机正反转运行的实验结果,图中波形分别为:估计转子位置和实际转子位置、估计转速和实际转速。对比转子位置波形可以看出,在动态过程中估计转子位置均能良好地跟踪实际转子位置,响应快速且误差很小,说明本文设计的锁相环位置观测器具有很强的稳态性能和动态性能。从图中的转速波形可以看出估计转速能够快速平稳地跟踪实际转速的变化,且误差较小,能够满足电机闭环矢量控制的要求。

图13 60 r/min电机正反转实验波形Fig.13 Experimental waveforms under forward-reverse operation at 60 r/min
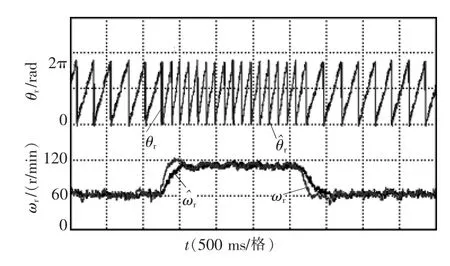
图14 电机升降速实验波形Fig.14 Experimental waveforms at increasing and decreasing speeds

图15 60 r/min负载以50%额定转矩谐波扰动的实验波形Fig.15 Experimental waveforms under 60 r/min operation and with 50%slope rated load disturbance
图14为在100%额定负载下,电机无位置传感器运行初始给定转速为60 r/min,升速到120 r/min然后又降速到60 r/min的实验结果,图中波形分别为实际转速和估计转速、实际转子位置和估计转子位置。可以看出变速过程中转子位置的观测误差很小,估计转速可以快速地跟踪实际转速的变化,稳定时的误差大约为7 r/min,无位置传感器控制系统能够满足负载条件下电机的调速运行。
图15为电机无位置传感器运行在60 r/min转速时,负载以50%额定转矩大小发生斜坡变化时的实验结果,图中波形分别为实际转速和估计转速、实际转子位置和估计转子位置,可以看出转子位置的观测误差较小,动态过程中的最大观测误差的电角度为10°,从转速波形可以看出,转速估计值可以快速的跟踪实际值的变化,动态过程中的最大估计误差为10 r/min,经过短暂的调整可以很快地消除误差,锁相环转子位置观测器可以快速地响应负载的变化,具有较好的抗负载能力。
5 结论
本文提出了一种基于纯延时滤波器的高频注入响应提取方法,给出一种根据最小闭环谐振峰值设计准则对标幺化锁相环的参数进行设计的方法,实现了永磁同步电机无位置传感器运行,获得了较好的控制效果,理论分析和实验结果表明:
(1)纯延时滤波器应用于高频信号的处理过程,获得了较好的提取效果,相对于传统方法,纯延时滤波器算法简单,对高频信号无相位延迟作用,增大了高频信号的信噪比,提高了转子位置的观测精度。
(2)所设计的标幺化锁相环转子位置观测器在不同运行条件下均能获得较高的观测性能,具有较强的稳态性能和动态响应速度,该方法能有效改善IPMSM无位置传感器矢量控制系统的控制性能。
[1]Quang N K,Hieu N T,Ha Q P.FPGA-based sensorless PMSM speed control using reduced-order extended kalman filters[J].IEEE Transactions on Industrial Electronics,2014, 61(12):6574-6582.
[2]李冉,赵光宙,徐绍娟.基于扩展滑模观测的永磁同步电动机无传感器控制[J].电工技术学报,2012,27(3):79-85.
Li Ran,Zhao Guangzhou,Xu Shaojuan.Sensorless control of permanent magnet synchronous motor based on extended sliding mode observer[J].Transactions of China Electrotechnical Society,2012,27(3):79-85(in Chinese).
[3]Bae B H,Sul S K,Kwon J H,et al.Implementation of sensorless vector control for super high speed PMSM of turbo-compressor[J].IEEE Transactions on Industry Applications,2003,39(3):811-818.
[4]王高林,张国强,贵献国,等.永磁同步电机无位置传感器混合控制策略[J].中国电机工程学报,2012,32(24):103-109.
Wang Gaolin,Zhang Guoqiang,Gui Xianguo,et al.Hybrid sensorless control strategy for permanent magnet synchronous motors[J].Proceeding of the CSEE,2012,32(24):103-109(in Chinese).
[5]Jansen P L,Lorenz R D.Transducerless position and velocitv estimation in induction and salient AC machines[J]. IEEE Transactions on Industry Applications,1995,31(2):240-247.
[6]Degner M W,Lorenz R D.Using multiple saliencies for the estimation of flux,position and velocity in AC machines[J]. IEEE Transactions on Industry Applications,1998,34(5):1097-1104.
[7]Jang J H,Sul S K,Ha J I,et al.Sensorless drive of surface-mounted permanent magnet motor by high frequency signal injection baced on magnetic saliency[J].IEEE Transactions on Industry Applications,2003,39(4):1031-1038.
[8]Yoon Y D,Sul S K,Morimoto S,et al.High-bandwidth sensorless algorithm for AC machines based on square wave type voltage injection[C].IEEE Transactions on Industry Applications,2011,47(3):1361-1370.
[9]Bianchi N,Bolagnani S,Jang J H,et al.Advantages ofinset PM machines for zero-speed sensorless position detection[J].IEEE Transactions on Industry Applications,2008, 44(4):1190-1198.
[10]Hasegawa M,Yoshioka S,Matsui K.Position sensorless control of interior permanent magnet synchronous motors using unknown input observer for high-speed drives[J]. IEEE Transactions on Industry Applications,2009,45(3):938-946.
[11]邱鑫,黄文新,卜飞飞.内置式永磁同步电机宽转速范围无位置传感器直接转矩控制[J].电工技术学报,2014, 29(9):92-99.
Qiu Xin,Huang Wenxin,Bu Feifei.Sensorless direct torque control of interior permanent mag netsynchronous machines over wide speed range[J].Transactions of China Electrotechnical Society,2014,29(9):92-99(in Chinese).
[12]王高林,杨荣峰,李刚,等.基于高频注入的IPMSM无位置传感器控制策略[J].电工技术学报,2012,27(11):62-68.
Wang Gaolin,Yang Rongfeng,Li Gang,et al.Position sensorless control strategy of IPMSM based on high frequency signal injection[J].Transactions of China Electrotechnical Society,2012,27(11):62-68(in Chinese).
[13]Raca D,Harke M C,Lorenz R D.Robust magnet polarity estimation for initialization of PM synchronous machines with near-zero saliency[J].IEEE Transactions on Industry Applications,2008,44(4):1199-1209.
[14]Harnefors L,Nee H P.A general algorithm for speed and position estimation of AC motors[J].IEEE Transactions on Industrial Electronics,2000,47(1):77-83.
[15]陈乐柱,杜荣权,穆瑜.有源滤波器的最优安装点和检测点的研究[J].电源学报,2015,13(5):10-14.
Chen Lezhu,Du Rongquan,Mu Yu.Research on optimal location and detection point of active power filter[J].Journal of Power Supply,2015,13(5):10-14(in Chinese).
[16]Seok J K,Lee J K,Lee D C.Sensorless speed control of nonsalient permanant magnet synchronous motor using roter position tracking PI controller[J].IEEE Transactions on Industrial Electronics,2006,53(2):399-405.
[17]张立红.基于高频注入法的永磁同步电机无传感器控制系统研究[D].天津:天津大学,2008.
Zhang Lihong.Sensorless control system of permanent magnet synchronous motor based on high frequency injection[D].Tianjin:Tianjin University,2008(in Chinese).
[18]Wang Yifei,Li Yunwei.Analysis and digital implementation of cascaded delayed signal cancellation PLL[J].IEEE Transactions on Power Electronics,2011,26(4):1067-1080.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:36
自动化仪表(2020年10期)2020-11-13 03:31:00
西南交通大学学报(2018年6期)2018-12-18 02:22:18
测控技术(2018年10期)2018-11-25 09:35:38
电子测试(2018年14期)2018-09-26 06:04:00
电测与仪表(2017年24期)2017-12-19 05:15:22
船舶力学(2015年6期)2015-12-12 08:52:20
电测与仪表(2015年9期)2015-04-09 11:59:28
电力工程技术(2014年6期)2014-03-20 14:19:40
汽车维护与修理(2014年10期)2014-02-28 12:15:01