
基于元胞遗传算法的多无人机编队集结路径规划
2018-02-03 02:37,,,,
机械与电子 2018年1期
,,, ,
(南京航空航天大学自动化学院,江苏 南京 211106)
0 引言
近年来,无人机被广泛应用于各个领域,并扮演着越来越重要的作用。为了提高无人机执行任务的效率,人们往往会采取多无人机协同编队完成任务的方式,其前提条件之一便是多机集结路径规划[1]。
无人机航迹规划需要满足在自身动力学约束环境下,能够规避威胁区,安全到达任务地点。目前常用的航迹规划算法有A*算法、动态规划算法、神经网络算法、遗传算法、群智能算法等[2]。而对于多机集结路径规划,除了需要满足单机航迹规划需求之外,还需要考虑多机到达时间的协同性以及多机之间的防碰撞[3-5]。
在此,提出了一种基于元胞遗传算法的航迹规划方法[6-9],保证了全局搜索和局部寻优之间的平衡,更好地保证了种群的多样性。然后针对多机集结路径规划的要求,设计了时间协同和防碰撞策略。最后通过仿真,验证了该算法的有效性和稳定性。
1 单机航迹规划
1.1 航迹编码
对于每一条航迹,都是由一个个航点组成,本文不考虑无人机飞行高度,将航迹规划简化为二维空间内的路径规划,故所涉及到的速度和航程计算都是在二维空间内的投影。记起始点坐标为S(xs,ys),终点坐标为G(xg,yg),中间n个航点的坐标为Pi(xi,yi) (i=1, 2, 3, …,n),则每一条航迹都可以表示为(S,P1,P2,P3, …,Pn,G)的航点序列,为了方便说明,S和G可分别表示为P0(x0,y0)和Pn+1(xn+1,yn+1)。
1.2 适应度函数
适应度函数用于评价航迹的优劣,航迹的适应度越大,说明越满足规划要求。在规划一条航迹时,需要尽可能避开威胁区域,同时为了使油耗最小,航迹应尽可能短。此外,由于多机集结具有时间约束性,所规划的航迹应满足速度约束条件。因此,选取威胁代价、航程代价和速度代价来表示适应度函数。
1.2.1 威胁代价
假设二维空间内有q个威胁点,各威胁点坐标和威胁半径分别为Wj=(xj,yj),rj(j=1, 2, 3, …,q)。

(1)

图1 威胁代价计算示意
dij为Wj到航线段PiPi+1最短距离,由此可以得出Wj到航线段PiPi+1的威胁代价值:
(2)
则航线段PiPi+1威胁代价值为:
(3)
记整条航迹的威胁代价值为S,则:
(4)
1.2.2 航程代价
在航迹规划过程中,需要使油耗最小,因此整个航程也需要尽量小。对于每条航迹,计算航迹的总长度L,由此可以得出航程代价值:
(5)
1.2.3 速度代价
多无人机集结具有时间约束性,假设所有无人机都需要在T时间内集结完毕,那么对于每架无人机,其飞行速度v应满足:
(6)
为了节省燃油以及应对突发状况,无人机应尽量飞行在巡航速度vc,由此可以得出速度代价值V为:
V=v-vcvmin≤v≤vmax
(7)
综上所述,可以得到航迹的总代价值C为:
C=ksS+klL+kvV
(8)
ks为威胁代价权重系数;kl为航程代价权重系数;kv为速度代价权重系数。使用f表示一个足够大的数,则航迹的适应度函数F可以表示为:
F=f-C
(9)
F值越大,说明规划的航迹越符合要求。
1.3 种群初始化
在进行遗传操作之前,需要先初始化航迹种群。由于航迹是由一个个航点组成的,生成初始航迹也就是生成一系列的航点。采用端点启发初始化的方法来生成初始航点,第i个航点Pi(xi,yi)为:
(10)
(11)
这样便保证了单个航线段步长不小于起点到终点的最小航线段。
1.4 初始化元胞空间
假设初始种群规模即初始航迹条数为N,建立N=u×w的二维元胞空间,将初始种群随机分布在元胞空间内。采用Moore型邻居结构,元胞空间边界采用周期型边界,如图2所示。在每一个(周期扩展)九宫格内,所有的“☆”都是“★”的邻居,所有的遗传操作都在邻居之间进行。

图2 元胞空间结构
1.5 遗传操作
1.5.1 选择
由于遗传操作只在邻居之间进行,对于每一个中心元胞,只在它的邻居元胞内选择个体遗传到下一代。在此,使用轮盘赌的方式进行个体选择,对于每一个邻居元胞内的个体,分别计算其适应度值Fi,则第i个元胞内的个体被选中的概率psi为:
(12)
1.5.2 交叉
定义交叉概率pc,在[0,1]之间取随机值pcr,若pcr≤pc,则进行交叉操作。
交叉操作如图3所示,进行交叉操作时,对于中心元胞个体Qcen和被选中的邻居元胞个体Qngb,除去初始点和终点,分别选择第c个航点,将其和前一个航点断开,将Qcen的c-1航点和Qngb的c航点相连,将Qngb的c-1航点和Qcen的c航点相连,分别计算新生成的2个航迹适应度,选取适应度大的进入下一代,记为Qnew。

图3 交叉操作
1.5.3 变异
定义变异概率pm,在[0, 1]之间取随机值pmr,若pmr≤pm,则进行变异操作。
(13)
取其中的最小值hm:
hm=min(h1,h2,h3,…,hq)
(14)
若hm>0,则说明Pe在威胁区外,保留个体Qnew无需变异,否则继续进行变异操作。
如图4所示,假设hm对应的威胁点为W,威胁半径为r,变异之后产生新的航点Pe′(xe′,ye′),则新航点坐标为:
(15)
ke为取值在[1, 2]之间随机增益系数,ω为随机旋转角度,使得变异具有随机性。变异之后,Pe便跳到了距离Pe长度为ke|hm|的新航点Pe′上,由于变异具有随机性,因此变异之后Pe′可能依旧在威胁区内。

图4 变异操作
在变异操作之后,更新Qnew为新的个体,仍然命名为Qnew,计算Qnew的适应度Fnew,并与中心元胞个体Qcen的适应度Fcen进行比较,若Fnew>Fcen,则替换中心元胞个体为Qnew,否则放弃新个体。
1.6 算法终止条件
由于算法计算量大,一般很难在短时间内找到全局最优解,因此可以设置以下终止条件以节省计算时间:
a. 设置较为合适的适应度标准F0,一旦新个体中有适应度值不小于F0的出现,则终止寻优,选择该个体作为最终航迹。
b. 设置最大进化次数K,一旦进化次数达到K次,则终止寻优,选取其中适应度值最大的个体作为最终航迹。
同时设置以上2个条件,可以得到相对满足条件的“次优解”。
1.7 航迹平滑处理
由于无人机飞行性能的约束,它的最小转弯角必须大于某个阈值φm,由上述算法生成的最终航迹可能存在大量角度小于φm的尖角,不满足无人机转向要求,因此需要对这些尖角进行平滑处理。
对于航迹上需要进行平滑处理的航点Pi,若Pi-1和Pi+1的连线不经过威胁区,如图5a所示。则将Pi移至航线段的中点Pi′处。若Pi-1和Pi+1的连线经过威胁区,如图5b所示,则分别在PiPi-1和PiPi+1的1/M处取点Pi1和Pi2,连接Pi1Pi2,组成新的航迹。

图5 航迹平滑处理
2 多机协同规划
多机协同飞行主要需要考虑同时到达目标点和飞行过程中的防碰撞。对于可以相互通信的无人机而言,只需相互之间实时汇报自己的状态,再通过速度调整即可。对于通信无法正常建立的情况下,可由下文提出的策略进行调整。
2.1 时间协同
多无人机编队集结需要多架无人机在规定时间内到达指定集结地点,最简单的方法就是进行速度控制。对于第k架无人机,其初始飞行速度vk0为:
(16)
Lk为第k架无人机的总航程,T为集结时间。由于无人机飞途中会有各种不确定性,无法保证全程都是按照设定速度飞行,由此提出了速度调整策略。
扩展第k架无人机航迹的航点编码Pki(xki,yki),增加到达第i个航点的约定时间tki,其值为:
(17)
Lki为无人机飞到Pki时的总航程。这样得到新的航点编码Pki(xki,yki,tki)。无人机飞行到Pki时,根据已飞时间tk和飞到下一航点的约定时间tk(i+1),可以确定下一阶段的飞行速度vk:
(18)
通过不断地对速度进行微调,便可以基本保证在约定时间到达对应航点,直至到达终点。
2.2 防碰撞策略
由于每架无人机都是单独进行航迹规划,因此规划出的航迹之间可能存在交叉或距离过近的情况,可能导致无人机之间发生碰撞,因此需要进行无人机之间防碰撞设计。
本文是在简化的二维空间内进行的航迹规划,而无人机实际飞行在三维空间内,因此,对于航迹有交叉或者距离小于安全距离Ds的无人机,可使其飞行在不同的高度层,每层之间相差至少1个安全距离。为了平衡燃油消耗,二维空间内航程大的无人机应飞行在较低的高度。这样,即使航迹有交叉或距离过近,也不会发生碰撞事故。
3 仿真验证
为验证本算法的有效性,设计了仿真验证环节,约束条件如下所述:
a. 待集结的无人机为3架,分别为UAV1,UAV2和UAV3。
b. 各无人机的起点分别为S1(10, 10),S2(20, 0),S3(0, 30),终点为G(100, 100),单位为 km。
c. 设置6个威胁区域,威胁中心和威胁半径分别为:W1(15, 88),r1=10;W2(23, 50),r2=15;W3(25, 15),r3=10;W4(57, 10),r4=10;W5(23, 50),r5=15;W6(55, 75),r6=20。
d. 无人机最小转弯角φm=60°,最小速度vmin=40 km/h,最大速度vmax=200 km/h,巡航速度vc=140 km/h,安全距离Ds=80 m。
e. 集结时间T=60 min。
设置每条航迹的航点数为9,初始种群大小(即航迹数)为40,分布在5×8的元胞空间内,进化代数为50。仿真结果如图6所示。
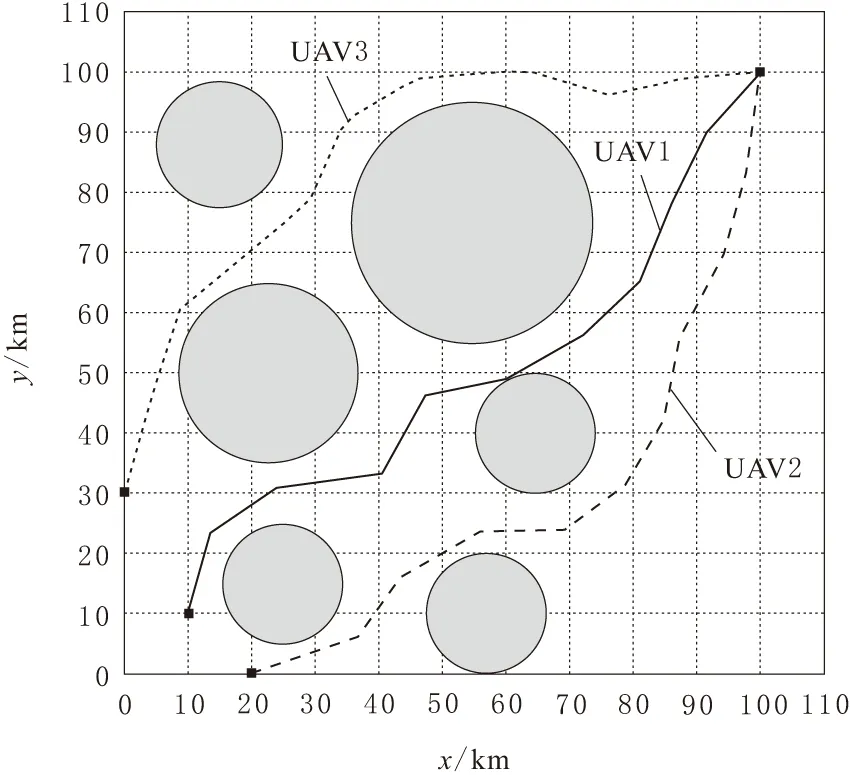
图6 三无人机协同航迹规划
根据仿真数据,计算各无人机的初始速度分别为v10=137.69 km/h,v20=142.49 km/h,v10=141.84 km/h,基本接近巡航速度vc,满足规划要求,由此可以计算出无人机到达各航点的预定时间,部分航点数据如表1所示。

表1 部分航点数据
仿真结果表明,规划出的航迹能很好地规避威胁区,并且满足航程和速度约束。
4 结束语
采用元胞遗传算法对多无人机协同编队的集结路径进行了规划,保证了全局搜索和局部寻优之间的平衡,使得初始种群(航迹)能够更好地保持其多样性。针对多机协同航迹规划的时间约束,在适应度函数中加入了基于时间约束的速度代价,使得规划出的航迹满足无人机在较大的范围内实时调整速度的要求,以便各无人机能够在突发状况下依旧能够准时到达集结点。针对多机防碰撞问题,设计了基于高度差的规划策略。最终仿真结果表明,规划出的航迹满足各项基本要求,算法搜索成功率高,具备良好的稳定性。
[1] 樊琼剑, 杨忠, 方挺, 等. 多无人机协同编队飞行控制的研究现状[J]. 航空学报, 2009, 30(4): 683-691.
[2] 陈江涛, 王文光, 孙进平. 基于改进遗传算法的无人机航迹规划[J]. 计算机工程与应用, 2016, 52(增刊1): 11-15.
[3] 倪良巧, 王道波, 蒋婉玥. 时间协同多无人机编队航迹规划[J]. 机械与电子, 2016, 34(2): 7-11.
[4] 周青, 张锐, 索晓杰, 等. 具有时间约束的无人机遗传算法航迹规划[J]. 航空计算技术, 2016, 46(2): 93-96, 101.
[5] Cetin O, Yilmaz G. Real-time autonomous UAV formation flight with collision and obstacle avoidance in unknown environment[J]. Journal of Intelligent & Robotic Systems, 2016, 84(1/2/3/4): 1-19.
[6] 林志龙, 鲁宇明. 元胞遗传算法的多样性研究[J].电子科技, 2015, 28(4): 9-12.
[7] Zhang Y, Wan X Y, Zheng X D,et al. Cellular genetic algorithm for multiobjective optimization based on orthogonal design[J]. Acta Electronica Sinica, 2016, 23(10): 4742-4746.
[8] Canyurt O E, Hajela P. Cellular genetic algorithm technique for the multicriterion design optimization[J]. Structural & Multidisciplinary Optimization, 2010, 40(1/2/3/4/5/6): 201-214.
[9] 张屹, 刘铮, 胡方军, 等. 基于元胞遗传算法的移动机器人路径规划[J]. 机床与液压, 2014, 42(9): 17-20.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
现代计算机(2021年32期)2022-01-11
青年歌声(2019年12期)2019-12-17
舰船电子工程(2019年4期)2019-05-07
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
北京测绘(2016年2期)2016-01-24
舰船科学技术(2015年8期)2015-02-27
