物流仓储自动拖车系统分析与设计
2018-02-02 15:39许哲文
中国新技术新产品 2018年2期
许哲文

摘 要:本文基于逆平行四杆机构设计了一种物流仓储自动拖车系统。该系统由拖车机构和自动化拖车测控系统组成。在分析对比逆平行四杆机构与普通平行四杆机构的特性之后,最终选用逆平行四杆机构,使本文设计的拖车的转向半径为一般拖车的一半,拓宽了其应用范围。同时针对作业环境特点在牵引车上应用多种传感器来实现自动控制,使拖车能转向避障并进行平稳的运动。论文完成了一种能简单运输且安全高效、环境适应性强的自动化拖车的设计。
关键词:拖车;逆平行四杆机构;牵引车;转向半径
中图分类号:F252 文献标志码:A
0 引言
当下,随着网购日益成为民众生活中重要的一部分,人们对快递的完好和送达速度有了更高的要求。而此时物流仓储扮演着相当关键的角色,但是物流分拣自动化水平较低、包裹运输安全等多个问题都在困扰我国物流仓储行业。因此目前物流行业急需一种能够代替工人进行简单运输且安全高效的自动化拖车。针对物流仓储存在着的问题,本文分析并设计了一种物流仓储自动拖车系统。
在结构优化设计方面,本文应用了逆平行四杆机构来减小拖车转向半径。四杆机构因其结构简单,成本低而被广泛应用,文献中关于生产生活中的四杆机构的研究有很多。曹烈以阿克曼原理为研究基礎,对四轮拖车梯形结构分析了误差存在的原因。黄健、张昊克服了常见平行四边形机构的死点问题。孙文刚对飞机牵引车转向系统的研究,提高了牵引车转向性能。本文借鉴前人经验,选用一种四杆转向机构来进行优化。在自动化设计方面,我们采用自动牵引车方案。设计了一套自动控制系统,应用传感器配合控制器实现自动避障运输,最终达到拖车安全快速准确地到达目标位置的自动化目标。
本文设计的物流仓储自动拖车系统实现了自动化的目标,提高物流仓储工作效率,发展并完善物流仓储业,并为其他物流仓储系统的分析与设计提供了一个切实可行的思路。希望本文的研究为今后该领域的研究贡献一份力量。
1 拖车结构设计
根据对市场上常见的拖车种类进行调查,发现其转向机构主要包括梯形机构和平行四边形机构。其中梯形机构能够使拖车转向时左右前轮得到合理的偏转角匹配,从而避免或减少轮子的侧滑,延长了轮子使用寿命。但是在实际工作中,由于原理误差的存在,无法实现拖车转向的纯滚动。而采用平行四边形机构的拖车存在着转向半径大的问题,无法在狭小的空间内进行工作。本文应用四杆机构中的逆平行四边形机构改善了该问题,并实现了其机构设计。
本文基于逆平行四边机构为物流拖车设计了一种转向机构,其特点在于前后轴在车体发生转向时能够协同运动,从而达到减小拖车转向半径的目的,解决了现存拖车转向半径大的问题。
该机构由车身(机架)、转向基座、连杆、滑块、车轮轴组成。转向基座铰接于车身底部前后两端,两车轮轴铰接于前后转向基座。两转向基座相向面设置铰链,并通过连杆进行连接。该机构中有构件5个,低副7个,高副0个,故机构自由度计算式(1)。
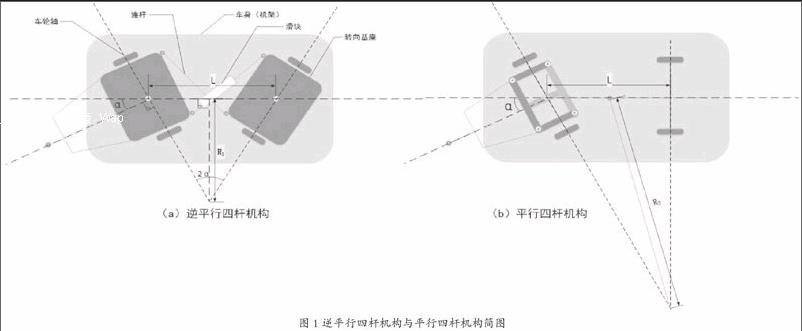
该机构在转向过程中,因逆平行四边机构两曲柄反向转动的特性,前后轮产生相反的转向,使得转向中心与前后轮动的距离减小,即减小了转向半径,如图1(a)所示。
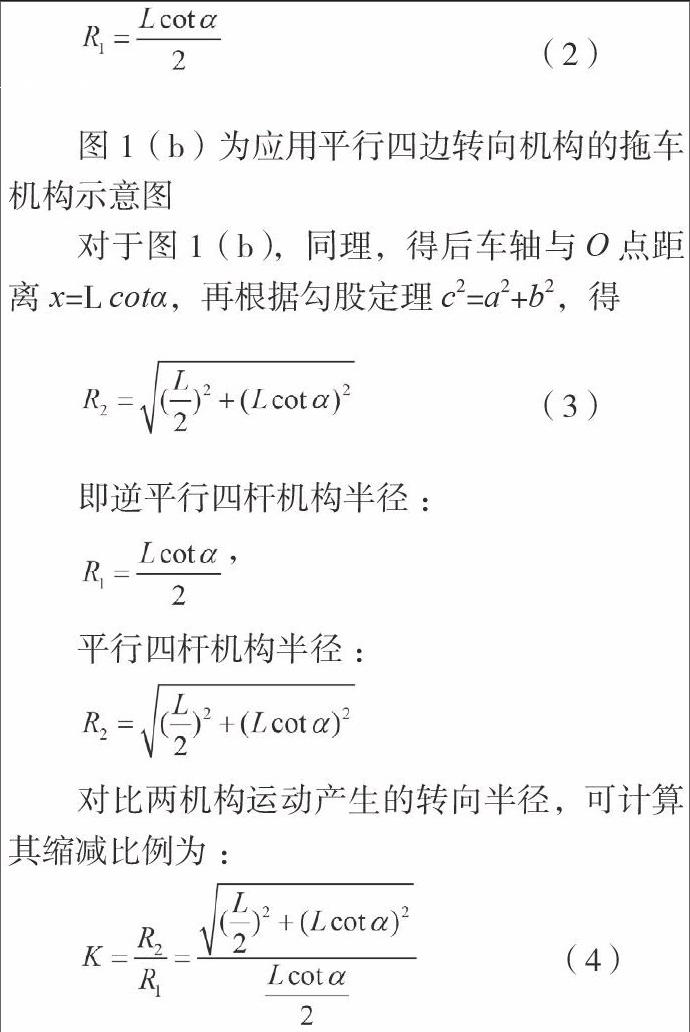
设拖车期望路径偏移量为α,两转向基座轴距为L,两车轴延长线相较于点O。则由图1(a)所示的几何关系可知,R1与转向基座侧边垂直。由图中余角关系,得两车轴延长线夹角为2α,
通过不等式放缩式4,得Kmin=2。经上述比较计算可知,当拖车轨迹偏移量相同时,应用逆平行四杆机构的拖车转向半径更小。
2 拖车运动分析
对图1所设计逆平行四杆转向机构进行抽象,绘制其机构简图及其坐标系,如图2所示。对其进行速度分析,分析其转向运动特点。
首先根据图2所示的逆平行四边坐标系对该逆平行四边机构进行矢量建模,创建矢量l0,l1,l2,l3来表示各构件。设各矢量的正方向与x轴正方向的夹角为θi(i=1,2,3,0)。从而建立位移方程:
经上述分析计算可知,逆平行四杆机构摇杆与曲柄,即l1与l3,运动时等速反向。
3 控制系统设计
本文设计优化了一种小转向半径的拖车机构,并为其设计了一套与之匹配的自动化拖车测控系统。该系统由牵引车及拖车构成,针对其作业环境特点在其上添加了传感器,以达到自动控制的目的。基于逆平行四杆机构设计的物流仓储自动拖车的测控系统由控制器、驱动器、传感器、直流电机和执行机构等部分组成,如图3所示。
在此系统中,牵引车的前、左、右三面都安装红外距离传感器,在运动过程中传感器将外界距离信号反馈传输给控制器。当小车与左(右)侧障碍物距离较近时,控制器收到信号控制驱动器,使得左(右)侧电机转速提高,从而使小车向右(左)侧行驶;当小车与前方障碍物距离较近时,控制器收到信号控制驱动器,使得左右两侧电机转速降低,从而使小车减速行驶。上述传感器的控制作用,使小车在牵引车的牵引下实现转向避障。
4 结论与展望
本文设计了一种物流仓储自动拖车系统,并应用逆平行四杆机构优化了拖车的转向机构以实现拖车的小半径转向功能。本文首先对拖车的转向机构进行了机构优化设计,降低了一般拖车50%的转向半径,使其能够在狭小的环境中进行作业,并分析了该机构的运动特点。同时为该拖车设计了一套自动控制系统,应用多种传感器,通过接收外界信号来完成自动化控制。本文所完成的机构优化仅应用了四杆机构,在今后的研究中,可以采用六杆或者其他多机构组合的优化方式对该机构进行再优化。
参考文献
[1]曹烈.四轮拖车转向梯形机构分析[J].科技资讯,2015,13(34):109-109.
[2]黄健,张昊,周国军,等.开门机构中反平行四边形机构的性能分析[J].机械工程师,2013(4):4-5.
[3]孙文刚.飞机牵引车转向系统研究[D].长安大学,2008.
[4]曹烈.地面设备拖车转向梯形机构分析[C].沈阳科学学术年会, 2015.
猜你喜欢
商用汽车(2022年7期)2022-10-11
装备制造技术(2020年3期)2020-12-25
专用汽车(2018年10期)2018-11-02
现代临床护理(2018年5期)2018-03-07
中国新闻周刊(2017年21期)2017-06-15
中国设备工程(2017年23期)2017-01-20
小雪花·初中高分作文(2016年2期)2016-05-30
阅读(中年级)(2016年8期)2016-05-14
汽车实用技术(2015年8期)2015-12-26
环球时报(2009-01-15)2009-01-15