
基于多柔体动力学的地铁单转向架性能研究
2018-01-31 09:00许方炜唐华平李云召
铁道科学与工程学报 2018年1期
许方炜,唐华平,李云召
基于多柔体动力学的地铁单转向架性能研究
许方炜1,唐华平1,李云召2
(1. 中南大学 机电工程学院,湖南 长沙 410000;2. 中车株洲电力机车有限公司,湖南 株洲 412000)
为系统分析地铁转向架在曲线通过过程中的动力学性能,以单个地铁转向架整体为研究对象,建立包含轮轨接触和各部件真实运动关系的多柔体地铁单转向架仿真模型。根据实际运行情况设计驱动轴运动曲线来模拟真实的列车运行过程,计算其曲线通过过程的垂向、横向加速度、左右轮重以及部分关键部位的动应力。分析转向架的平稳性与稳定性,研究转向架的动力学性能并与实验数据进行对比,结果基本一致。为转向架的研究与分析提出一种更接近实际运行情况的大型多柔体动力学系统仿真建模方法。
轨道车辆;有限元仿真;多柔体;转向架;动力学性能
转向架是承载车体自重以及引导车辆行走的关键部位,地铁的评价标准,即其运行稳定性和平稳性决定着转向架动力学性能的好坏。目前,国内外对于地铁转向架动力学性能的仿真研究主要分为2类,一类是从多体动力学角度出发,建立转向架的多刚体模型,结合线路动力学实验对转向架的动力学性能进行评估,张晖[1]在多刚体动力学分析软件SIMPACK中建立了高速列车单车动力学仿真模型,研究不同车轮踏面对高速列车的动力学性能的影响。晏红文等[2]利用ADAMS/Rail建立了转向架和整车的动力学模型,对整车的曲线通过性能和直线上的平稳性指标进行了分析。张孟等[3−4]提出一种SIMPACK的高速动车转向架动力学性能仿真建模与分析方法。另一类则是从静态或准静态的角度出发,对转向架进行静强度分析,并结合数值计算对所得结果进行校核。Ali等[5]从静力学角度出发,考虑了速度和轨道粗糙度的影响,对双轴转向架进行了静强度分析,并对分析所得的von-Mises应力采用等效应力计算,分析了列车不同部分结构所对应的速度与应力的影响分布。缪炳荣等[6]则结合上述2类研究方法,先利用SIMPACK的多体仿真技术获得车体结构的动载荷历程,再在ANSYS中利用准静态应力/应变分析法计算结构危险节点应力影响因子,根据模态分析技术确定车体结构固有频率和模态振型以及危险点位置。最后,基于动应力历程以及Palmigren-Miner损伤理论,利用FE-FATIGUE软件的基于应力的结构安全因子分析法对车体结构进行疲劳寿命预测,其中包括应力应变的循环计数、损伤预测和最终寿命估计。以上工作均对类似机车转向架的仿真分析有着重要的指导意义。转向架的工作过程是一个复杂的动态的过程,其结构也并非是理想的刚体结构,因此仅对其进行静态的应力分析、动态的多刚体分析或者是简单的两者相结合都不能充分反映转向架的真实工作情况,缺乏对实际运行情况的综合分析。本文在前人研究的基础上,从大型多柔体系统动力学角度出发,针对某型地铁转向架,建立了地铁运行过程中最为复杂的曲线通过工况的轮轨接触以及各运动部件间的约束关系模型,采用显式动力学方法分析模型得到转向架各个部件在曲线通过工况下的动力响应,分析该转向架的动力学性能以及一些关键部位的动应力时间历程曲线,为转向架的设计分析及优化寻找一种新的方法。
1 轨道车辆动力学性能的评定指标
根据国内外轨道车辆发展、运用与研究的实践经验,我国的GB5599-85车辆动力学性能评定和试验规范对评价车辆动力学性能的内容[14]主要从车辆安全性(即车辆运行稳定性)、车辆平稳性以及转向架重要部位在轮轨动态交变应力作用下的时间−等效应力曲线3个方面来进行衡量。
1.1 车辆运行安全性及其评定指标
轨道车辆的安全性通常按照脱轨系数、轮重减载率等指标对其运行的稳定性进行评定。
1.1.1 脱轨系数
用构架力所反映的整条轮轴横向力与左右轮重1,及2形成的式(1)进行计算,即

脱轨系数评定指标:/<1.2为第1限度,必须满足,且有一定可能危险性的限度;/<1.0为第2限度,满足该指标时具有一定的安全裕量。
1.1.2 轮重减载率
脱轨系数所评价的仅仅是两轮均载情况,而无法评定左右轮载荷分布严重不均的情况,所以这里采用轮重减载率对运行安全性进行评价,轮重减载率按照式(2)进行计算。
采用轮重减载率评定时,第1限度为0.65,第2限度为0.6。脱轨系数计算式(1)是基本的评定标准,但本文所研究问题涉及到转向架曲线通过的情况,左右轮载荷分布不均,故需采用轮重减载率评定式(2)对其安全性进行评定。
1.2 车辆运行平稳性及其评定指标
车辆运行平稳性按照平稳性指标来评定,以车体的振动性能为评价对象,平稳性的计算可按式(3)进行。平稳性评定指标如表2所示。
式中:为平稳性指标;为振动加速度,g;为振动频率,Hz;()如表1所示。
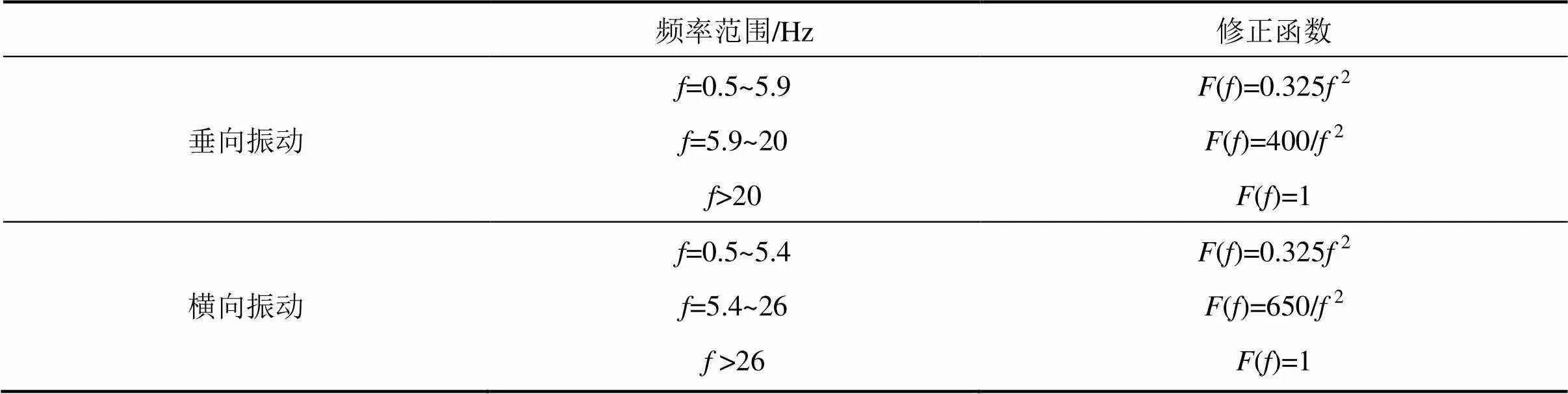
表1 频率修正函数

表2 轨道客车平稳性评定标准
1.3 轮轨动态作用下转向架重要部位应力谱
根据试验实际测点设置单元应力输出点,记录重要部位在交变应力作用下的von-Mises等效应力−时间曲线,并对曲线进行分析,得出转向架最大应力部位以及其出现的时间点。
2 转向架仿真模型
2.1 模型参数
转向架参数参考某转向架的工程设计参数,地铁转向架的构架为H形无端梁结构,由2根对称分布的侧梁和中间的横梁构成构架主结构,侧梁下端对称分布4个U型轴箱支座,两端共设置了4个一系钢簧安装座,侧梁中间凹下部分为空气弹簧安装座,由2根圆形横梁连接,横梁上安装有牵引电机支架与中央牵引装置,实体模型如图1所示。
转向架构架为冷轧或热轧钢板、钢管以及铸件焊接而成的钢结构。其主要材料参数见表3。悬挂系统参数如表4所示。
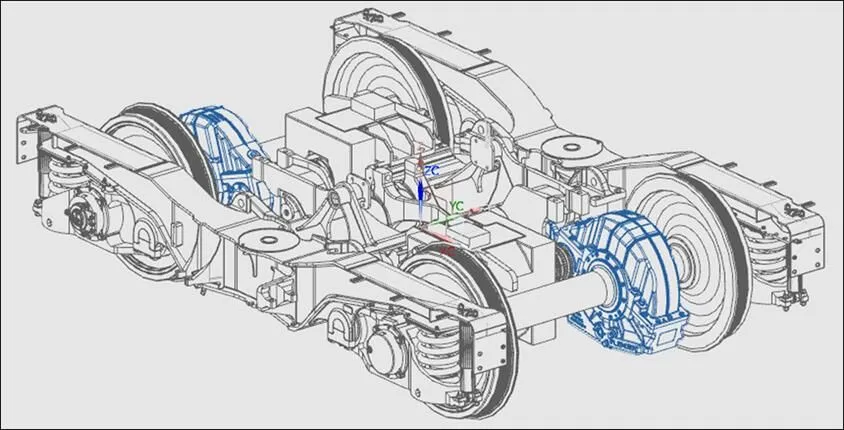
图1 转向架实体模型
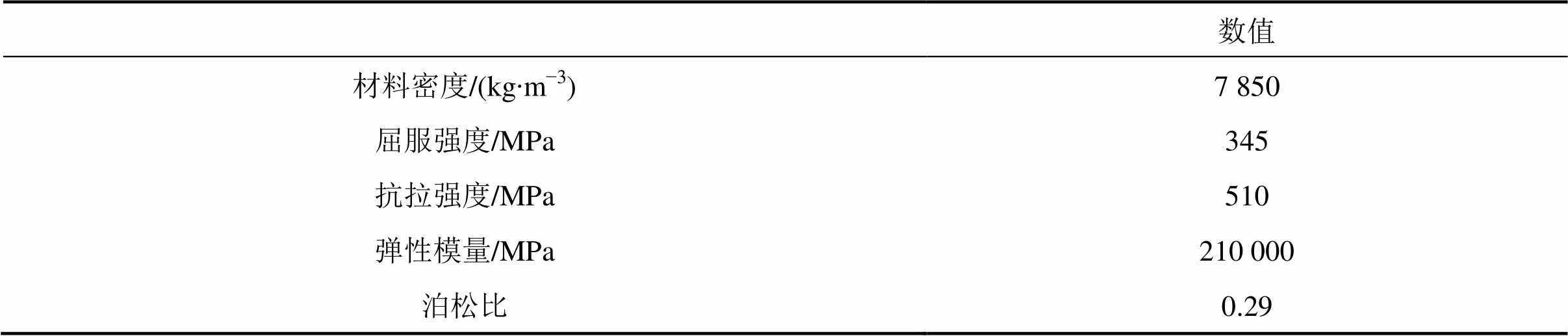
表3 各部分材料参数

表4 悬挂系统参数
2.2 转向架有限元模型的建立
2.2.1 网格划分
对构架大部分薄壁结构采用中面处理,仅将一些厚度不均不适合处理成中面的的结构处理成四面体网格。将轮对、轴箱转臂、橡胶关节、轨道以及枕木处理成体网格,其中轮对以及轴箱转臂采用四面体网格处理,轨道采用六面体网格处理;弹性元件根据其所在位置以及所承受载荷分别采用不同的简化方式,如一系钢簧简化处理成弹簧单元,而轴箱转臂橡胶关节则需按原模型处理为六面体实体单元。总共生成366 452个节点、20 732个面单元和248 164个体单元。
2.2.2 关键部件间的相对运动以及连接关系
电机采用横向布置,以全悬挂的方式安装在转向架构架上;轴箱定位采用转臂式定位,一系悬挂系统(包括螺旋钢弹簧、橡胶垫、橡胶关节定位器等)布置在轴箱体外侧;牵引装置采用Z字形拉杆中心牵引销方式。
2.3 轮轨接触关系仿真
轮轨接触的处理在本模型中属于一大难点,其准确与否对仿真结果有着重大的影响。本文中轮对及轨道踏面几何模型与实际物理模型一致,在建立有限元模型时对轮轨相互接触部分进行了网格细化处理,使其充分接近实体模型,轮对与轨道间采用自动面面接触来模拟,以反映真实的轮轨间相互作用的情况[11]。
2.4 单转向架边界等效设置
由于地铁整车模型巨大且复杂,对于目前大多数计算机性能来说都是不可能完成的任务,且除头车外的动车车厢结构相同,具有重复性,各车厢转向架部分结构基本一致,且在运动过程中受力情况相似,因此本文在建模中取具有一般性的动车单转向架建模,在车体连接处施加等效面载荷来模拟车体在运行过程中对转向架的作用力,从而模拟在整车运行过程中该转向架的运动及受力情况[7]。
2.5 转向架曲线通过过程的仿真
设计曲线为一段由“直线—入缓和曲线—圆曲线—出缓和曲线—直线”组成的曲线[8]。其中入缓和曲线与出缓和曲线为三次抛物线,设置轮轨摩擦系数为0.3,转向架通过曲线的速度为70 km/h,具体各段的曲线参数见表5,线路总体模型如图2 所示。

表5 曲线参数
图2 缓和曲线模型
3 地铁单转向架曲线通过动态特性
3.1 质量增加及能量变化曲线
在LS-DYNA的仿真过程中,质量增加比例和沙漏能所占总能量的比例是2个决定仿真是否在理论上有效的参数。为了加快模型的计算速度,将质量缩放系数引入了模型增加计算时间步长,单也因此不可避免的会出现质量增加现象。一般情况下,质量增加在5%以内可以认为此次仿真有效;而为了简化数值积分计算过程,减少运算次数,LS- DYNA采用的是单点高斯积分,这种模式会导致沙漏模式,即零能模式,该模式在数学算法上稳定,但在物理上是不可能出现的状态,因此对沙漏能的控制应保持在系统内能的5%以内[9]。图3和图4分别为此次仿真的质量增加百分比曲线以及沙漏能占总能量的百分比曲线。由图3和图4可以看出,在曲线通过过程中质量增加的比例为0.32 %,沙漏能所占总能量比例为3.4%,两者均小于5%,此次模型的仿真计算结果有效。
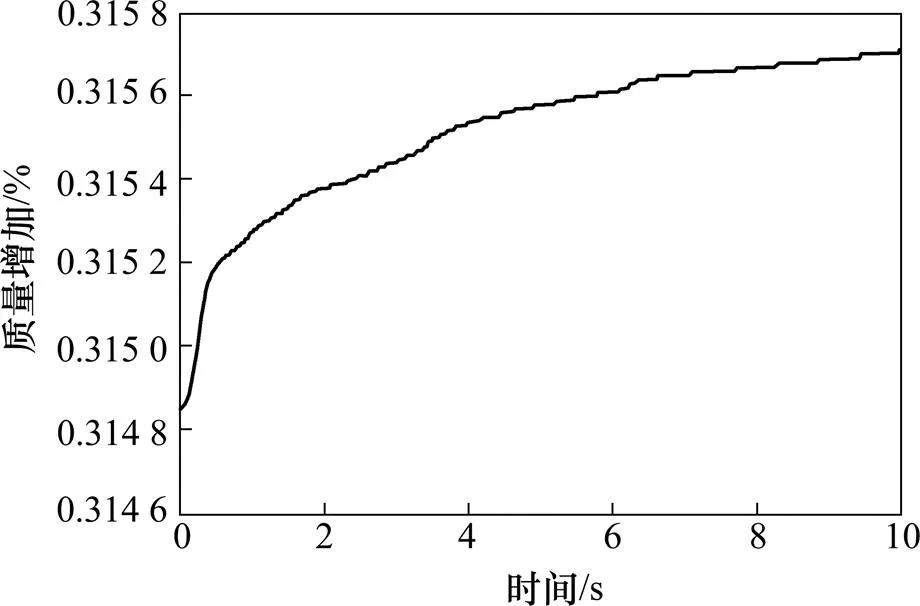
图3 质量增加百分比曲线
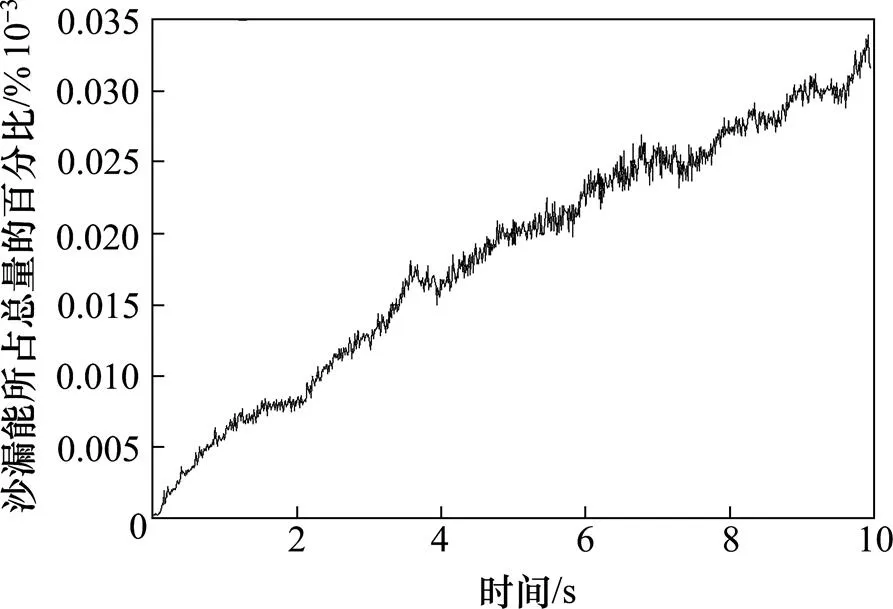
图4 沙漏能所占总能量百分比
3.2 转向架动力学响应仿真分析结果
3.2.1 轮重减载率
记录动力轴左右轮的铰链所受支反力来代表左右轮所受载荷,图5为左右动力轮的载荷时间历程曲线。由此可根据式(2)计算转向架在曲线通过过程中的平均轮重偏载率为0.34,最大轮重减载率为0.63。
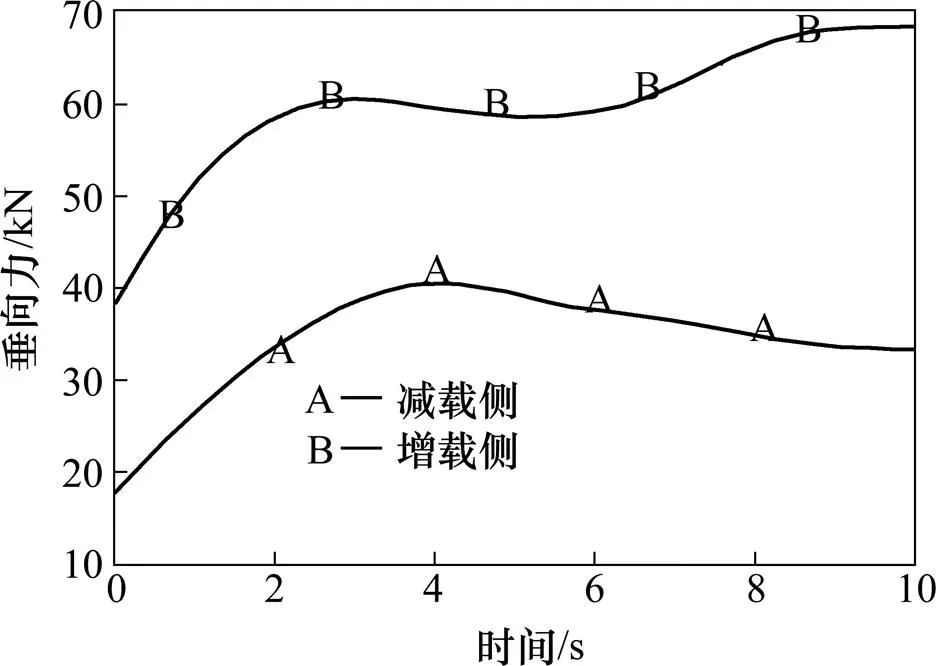
图5 动力轴轮重载荷
3.2.2 车辆运行平稳性
选取车体质心关键点作为转向架垂向以及横向加速度的测点,在仿真过程中记录加速度曲线,垂向、横向加速度曲线分别如图6和图7所示。
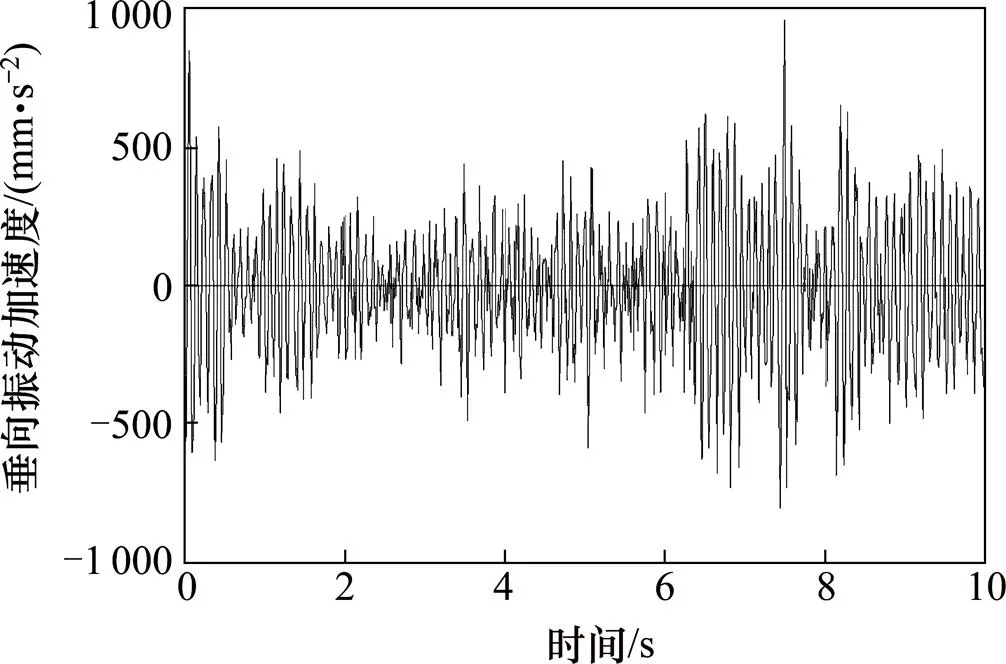
图6 垂向加速度时间历程
对曲线数据进行快速傅里叶变换可得转向架的垂向、横向振动频率如图8和图9所示。
结合式(3)即可得转向架垂向振动加速度、频率以及平稳性参数如表6所示。
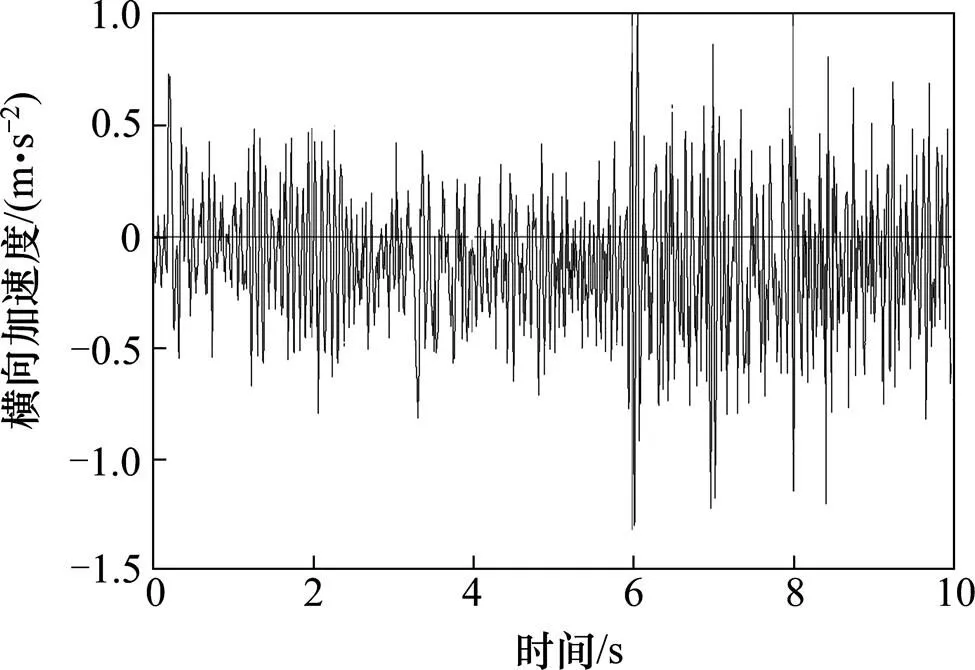
图7 横向加速度时间历程
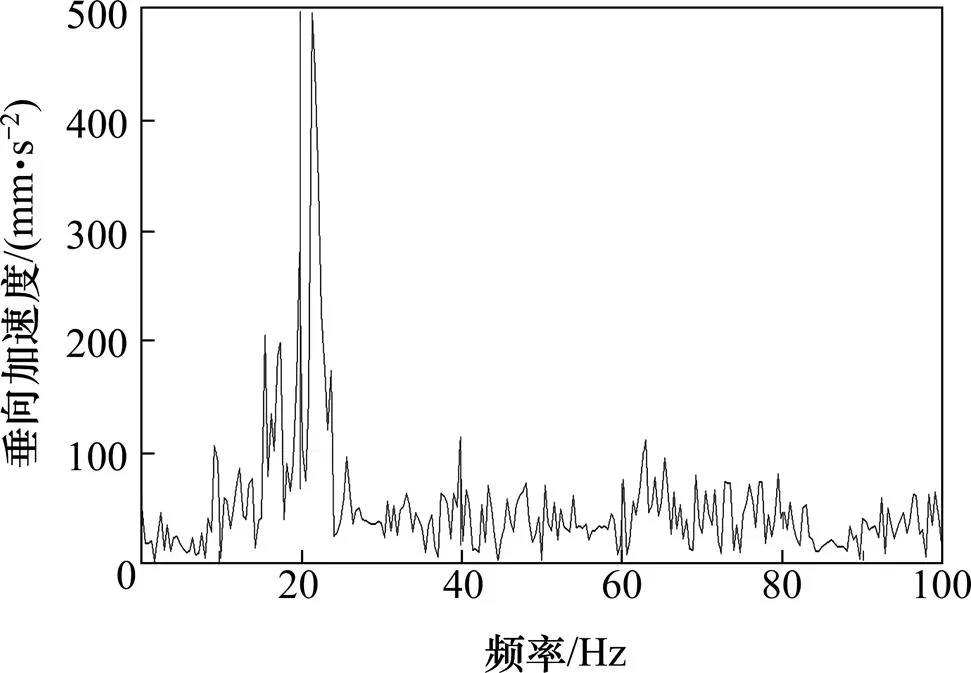
图8 垂向振动频率曲线
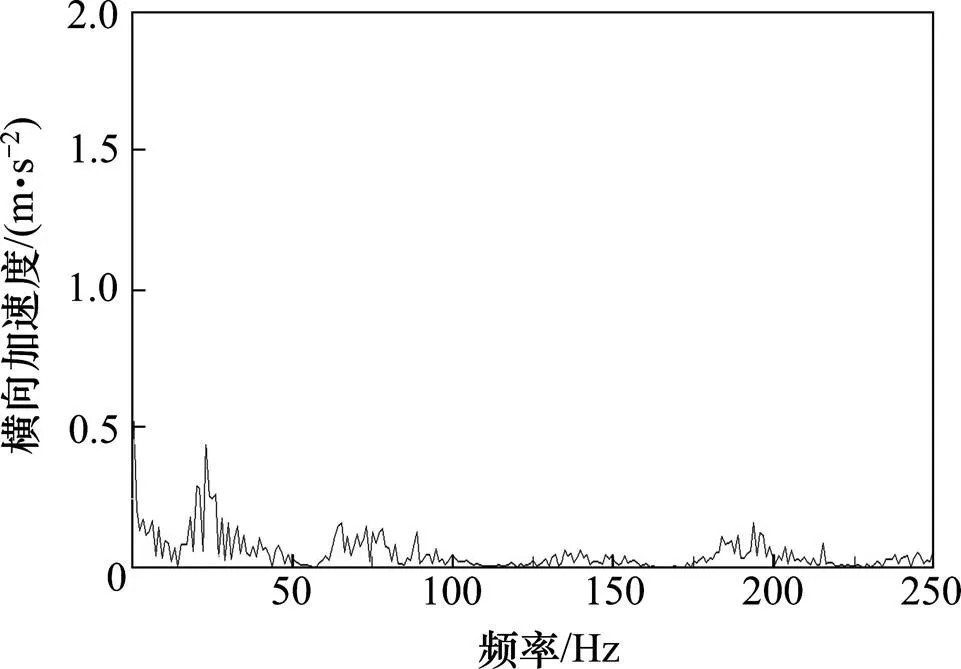
图9 横向振动频率曲线
转向架平稳性参数在平均加速下均小于2.5,等级为优,仅在个别最大加速度处达到2.5以上,但仍处于合格范围内。

表6 转向架平稳性系数
3.3 转向架各测点部位等效应力曲线
转向架结构本身包含多种材料类型,其各个结构之间的运动关系复杂,当结构受载时,可能会引起结构屈服,出现弹塑性、黏弹性变形,严重时甚至出现材料硬化的现象[12−13]。在模型中按照转向架静强度试验标准选取应力测点,并对所得Von- Mises应力曲线进行适当滤波后得到如图10的应力曲线。
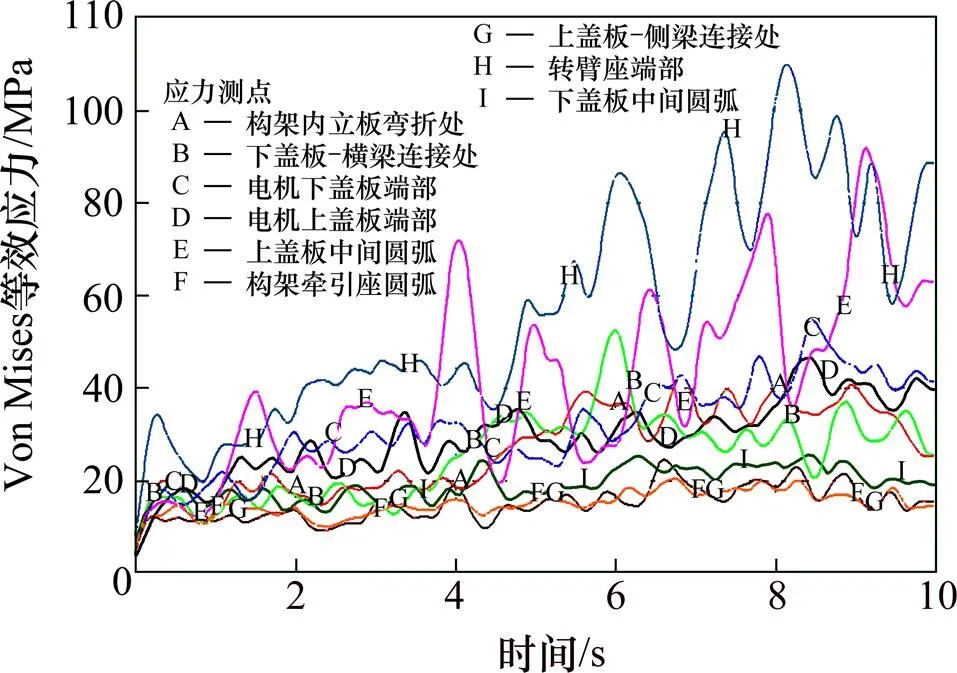
图10 构架各测点等效应力曲线
由图10可知:上述部位的动应力时间响应均处于较低的应力水平,其中下盖板的轴箱转臂座与下盖板中间圆弧处在4~10 s的时候有应力增加现象,是由于转向架转弯时一系、二系悬挂与构架之间存在着较大的横向力传递引起的[10],最大应力处为109 MPa,仍处于安全应力范围。
4 实验数据对比
在某型转向架中心距地面1 000 mm处布置横向,垂向加速度传感器,对该转向架空车在70 km/h的速度下通过半径为350 m的曲线过程中的垂向、横向振动加速度进行了测试,并将其与仿真结果进行对比,结果如表7所示。

表7 加速度试验结果及与仿真结果的对比
由表7可知,平均加速度的仿真误差均在20%以内,与试验结果符合的较好,最大加速度由于存在某些干扰点,与试验结果有一定的出入,最大误差为−13.2%,但在误差允许范围之内,此次仿真结果与试验结果较为符合。
5 结论
1) 基于多柔体动力学建立包含轮轨接触和各部件真实运动关系的多柔体地铁单转向架仿真模型,根据实际运行情况设计了驱动轴运动曲线来模拟真实的列车运行过程。
2) 采用显示动力学软件LS-DYNA对地铁转向架进行了动力学性能的分析,计算了转向架的垂向及横向振动加速度、动力轴两端支反力以及转向架一些关键部位的动应力响应。
3) 分析转向架的轮重偏载率和运行平稳性,并将转向架的横向与纵向加速度部分分析结果与实验数据进行了对比,结果表明,仿真结果与实验结果符合的较好,说明该转向架的多柔体动力学建模方法能比较准确的模拟转向架的动态特性。
[1] 张晖. 高速动车转向架动力学性能研究[D]. 长沙: 中南大学, 2011. ZHANG Hui. The research on high-speed train bogie dynamic performance[D]. Changsha: Central South University, 2011.
[2] 晏红文, 郭红锋. 新型地铁车辆转向架的研究[J]. 机车电传动, 2006(2): 36−39. YAN Hongwen, GUO Hongfeng. Study on new metro bogie[J]. Electric Drive For Locomotive, 2006(2): 36−39.
[3] 张孟, 张轮, 罗意平, 等. 高速动车转向架动力学性能SIMPACK仿真建模与分析[J]. 城市轨道交通研究, 2015(10): 36−41. ZHANG Meng, ZHANG Lun, LUO Yiping, et al. SIMPACK modeling and analysis of the high-speed emu bogie dynamic performance[J]. Urban Mass Transit, 2015(10): 36−41.
[4] 李亨利, 李芾, 傅茂海, 等. 曲线几何参数对货车转向架曲线通过性能的影响[J]. 中国铁道科学, 2008, 29(1): 70−75. LI Hengli, LI Fu, FU Maohai, et al. Influence of curve geometric parameters on the curve negotiation performance of freight car bogies[J]. China Railway Science, 2008, 29(1): 70−75.
[5] Ali Ziaei Asl, Fatemeh Ahmadian, Mohammad Zehsaz, et al. Effect of increasing speed on stress of biaxial bogie frames[J]. Engineering, 2011, 3(3): 276−284.
[6] 缪炳荣, 张卫华, 肖守讷, 等. 基于多体动力学和有限元法的车体结构疲劳寿命仿真[J]. 铁道学报, 2007, 29(4): 38−42. MIAO Bingrong, ZHANG Weihua, XIAO Shoune, et al. Carbody fatigue life simulation basedon multibody dynamics and FEM[J]. Journal of the China Railway Society, 2007, 29(4): 38−42.
[7] Palli, Srihari, Koona, et al. Dynamic analysis of Indian railway integral coach factory bogie[J]. International Journal of Vehicle Structures & Systems, 2015, 7(1): 16−20.
[8] Park Joon Hyuk, Koh Hyo In, Hur Hyun Moo, et al. Design and analysis of an active steering bogie for urban trains[J]. Journal of Mechanical Science and Technology, 2010, 24(6): 1353−1362.
[9] Eom Beom Gyu, Kang Bu Byoung, LEE Hi Sung. A study on running stability assessment methods for 15 small scaled bogie of saemaul using small-scaled derailment simulator[J]. International Journal of Precision Engineering and Manufacturing, 2013, 14(4): 589−598.
[10] Seyed Milad Mousavi Bideleh, Viktor Berbyuk. Multiobjective optimisation of bogie suspension to boost speed on curves[J]. Vehicle System Dynamics, 2016, 54(1): 69−96
[11] YANG Chunlei, LI Fu, HUANG Yunhua, et al. Comparative study on wheel–rail dynamic interactions of side-frame cross-bracing bogie and sub-frame radial bogie[J]. Journal of Modern Transportation, 2013, 21(1): 1−8.
[12] 赵天祺. 副构架式转向架刚柔耦合动力学研究[D]. 成都: 西南交通大学, 2015. ZHAO Tianqi. Research on rigid-flexible coupling vehicle system dynamic for sub-frame bogie[D]. Chengdu: Southwest Jiaotong University, 2015.
[13] 沈鹏. 基于线路试验的重载货车转向架动力学性能研究[D]. 成都: 西南交通大学,2015. SHEN Peng. Research on bogie dynamic performance of heavy haul freight car based on track test[D]. Chengdu: Southwest Jiaotong University, 2015.
[14] GB/T 5599—1985, 铁道车辆动力学性能评定和试验鉴定规范[S]. GB/T 5599—1985, Railway vehicles--Specification for evaluation the dynamic performance and accreditation test[S].
The research on performance of metro bogie curve passing process based on multi flexible dynamics
XU Fangwei1, TANG Huaping1, LI Yunzhao2
(1. College of Mechanical Engineering, Central South University, Changsha 410000, China; 2. CRRC Zhuzhou Locomotive Co., Ltd, Zhuzhou 412000, China)
To analyze dynamic performance of metro bogie`s course of traveling along curves systematically, a multi flexible simulation model of the whole bogie was built, which takes the mutual contact between wheels and tracks and the motion relationship among different parts of the bogie into account. The curve of the actuating axis`s motion was designed to simulate the real process of electric motor`s actuating process. The vertical and horizontal acceleration, the wheel load of each side and the dynamic stress of some particular parts of the bogie was calculated. The ride stability and running stability was analyzed. The dynamic performance of the bogie was researched and compared to the experiment data. The simulation result is quite consistent to the experiment data. A new method of system simulation modeling which is closer to the real running state was put forward for the research and analysis of bogies based on multi flexible body dynamics.
railway vehicles; finite element analysis; multi flexible body; bogie; dynamic performance
U260.331;U231
A
1672 − 7029(2018)01 − 0206 − 07
2016−12−27
南车120 km/h米轨城际动车组研制资助项目(2011NCK020)
唐华平(1964−),男,湖南郴州人,教授,博士,从事大型重载车辆动力学研究;E−mail:huapingt_csu@163.com
猜你喜欢
铁道机车车辆(2022年6期)2023-01-04
铁道建筑(2022年3期)2022-04-07
科技与创新(2020年19期)2020-10-09
哈尔滨铁道科技(2020年4期)2020-07-22
现代商贸工业(2020年24期)2020-07-17
汽车世界·车辆工程技术(中)(2020年1期)2020-07-09
铁道运营技术(2020年2期)2020-04-08
铁道通信信号(2020年10期)2020-02-07
制造技术与机床(2019年12期)2020-01-06
中国铁道科学(2019年2期)2019-04-20
