
基于PID算法板球控制系统的设计
2018-01-28 21:55董尧尧王大庆陈瑶蔡文瑶潘文惠
电子技术与软件工程 2017年18期
董尧尧+王大庆+陈瑶+蔡文瑶+潘文惠

摘要
本控制系统由STM32单片机控制模块、舵机执行模块、图像采集模块、图像处理模块、平板和球以及板球机械结构组成的闭环控制系统。0V7725负责采集小球的位置信息,单片机处理图像位置数据后通过PID精确算法调节舵机以控制平板运动,从而达到控制小球运动轨迹的目的。本系统实现了小球仅在平板自身角度调整控制下快速寻位、恢复静止的功能,并能准确按照规定路线到达目标位置,且受外力影响后能够在5秒内恢复板球平衡状态,具有很好的适应性。另外,本系统小球及平板位置图像可通过液晶显示,智能性好,反应速度快。
【关键词】STM32 0V7725 PID 算法 板球系统
1机械结构方案
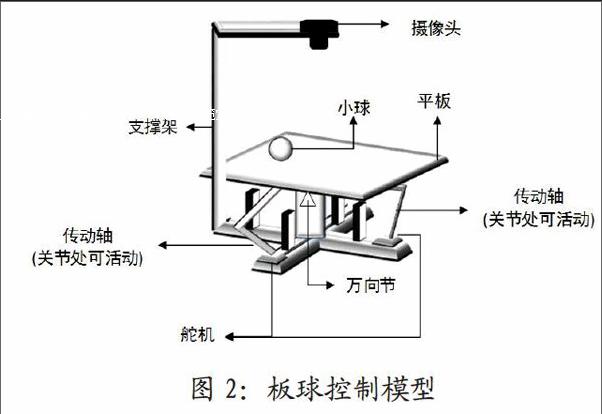
本控制系统主要包括单片机控制模块、舵机执行模块、图像采集模块、图像处理模块、平板和球以及板球机械结构组成。平板采用铝镁合金材质,具有强度高,质量轻等优点。平板由万向节连接碳杆再连接舵机组成。系统采用MG995舵机,其金属外壳能提供较好的散热,更牢固的固定位置,让舵机内的电机运行在更高功率下,以提供更高的扭矩输出。金属齿轮强度高,能提供13KG的扭矩。位于平板最上方的图像采集模块不断采集小球和平板的图像,运用图像处理算法对提取的图像进行处理,获取小球的坐标位置信息,通过坐标变换转换成小球在平板上的位置信息,将该位置信息返回单片机控制模块。图像采集模块采用OV7725,一个高集成度的CMOSCamera Chip传感器,在单芯片上提供了VGA图像处理器的全部功能。OV7725内部集成了对图像传感器的完善控制,包括曝光控制、伽马校正、白平衡、色彩饱和以及色调控制,可硬件二值化。单片机控制系统通过处理数据后控制PWM波占空比控制舵机转速及转动角度,不断调整圆盘的倾角,从而实现对小球的控制。单片机控制系统采用STM32F407ZET6,其内核为ARM32位Cortex-M3CPU,最高工作频率为72MHz,有112个快速I/O端口,11个定时器:4个16位定时器,每个定时器有多达4个用于输入捕获、输出比较、PWM、脉冲计数的通道和增量编码。该芯片运行速度快,可操控性强。本系统结构框图如图1所示,板球控制模型如图2所示。
2小球运动检测及处理方案
OV7725传感器的输出采用VGA。一个像素用16位的数据(RGB565)表示,而OV7725的数据总线宽度最多可设置为10位,故采用了8位的数据宽度(D2-D9)输出图像信息。对OV7725内寄存器的配置接口采用SCCB总线。利用传感器读入数据,即读取底板上像素点的颜色并进行识别。由于RGB格式的颜色数据的效果不明显,所以将其转换为HSL格式数据。首先遍历寻找腐蚀中心,然后在之前腐蚀中心点处进行迭代并向外寻找新的腐蚀中心。腐蚀算法从该点开始分别向上下左右四个方向进行读点,若点的颜色符合条件则往外读,四个方向都结束后得到四个边缘点的坐标,记左边缘点的x轴坐标为left,右边缘点的x轴坐标为right,上边缘点的y轴坐标为up,下边缘点的y轴坐标为bottom,那么坐标((right-left)/2,(up-bottom)/2)即為新的腐蚀中心,从而确定小球的位置。
3执行机构控制算法与驱动
本系统采用PID算法来控制舵机转动的速度及角度。舵机开始工作后,图像采集模块不断采集当前小球位置坐标状态,并与之前的状态比较,使得小球的运动状态逐渐趋向于平稳。PID算法控制器由平板转动角度比例P、角度误差积分I和角度微分D组成。
平板转动角度比例P:对舵机角速度进行比例调整,即对平板转动角度调整。比例越大,调节速度越快。但不能过大,过大可能造成舵机因工作状态突变而使平板不稳定。
角度误差积分I:使系统消除稳态误差,提高无差度。加入积分调节可使系统稳定性下降,动态响应变慢。本系统追求更快更稳完成对小球的控制,对积分调节的需要就非常弱。即保证在不需要时系统不会受到影响。
角度微分D:微分作用反映平板角度的变化率,即角速度。具有预见性,能预见偏差变化的趋势因此能产生超前的控制作用,在偏差还没有形成之前,己被微分调节作用消除。因此,可以改善系统的动态性能。在微分时间选择合适情况下,减少调节时间。
4小结
使用了基于PID算法的板球系统控制,可以迅速提高单片机运行速度,使得板球系统可以快速寻迹、稳定。
参考文献
[1]曾乘,柳强.板球系统PID控制响应的多项式响应面建模研究[J].电子设计工程,2016(16):28-30.
[2]李爱莲.基于视觉检测的板球系统控制研究[J].科技视界,2014:26-27.
[3]史智慧.基于视觉检测板球系统的变论域模糊控制研究[J]西南师范大学学报,2017(02):148-152.
[4]翟晨汐.板球系统的直接自适应模糊滑模控制[J]计算机仿真,2016(02):383-388.
[5]徐云云.基于视觉的板球控制系统算法研究[D].成都:西华大学,2012.
[6]李剑敏.板球系统的控制算法研究[D].江门:五邑大学,2013.
[7]张新楠.板球系统的控制算法研究[D].大连:大连理工大学,2011.endprint
猜你喜欢
灌篮(2022年4期)2022-06-17
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
动漫界·幼教365(中班)(2020年8期)2020-06-29
家教世界·创新阅读(2020年4期)2020-06-03
家教世界(2020年10期)2020-06-01
自动化学报(2019年6期)2019-07-23
意林(绘英语)(2018年1期)2018-04-28
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
当代体育科技(2015年3期)2015-12-05
