
全地形机器人小车设计
2018-01-26 04:58南京林业大学机械电子工程学院强璐亚陆袁博王皖君
电子世界 2018年1期
南京林业大学机械电子工程学院 强璐亚 马 帅 陆袁博 王皖君
1 引言
2 结构设计
全地形机器人采用六轮悬挂式车身结构,将车身分成两段,以前四轮为整体,后两轮悬挂,车身两部用套筒连接。机器人利用加宽并附有螺帽的车轮,配合独立供电的四台直流电机、两台360°旋转的圆周舵机,其攀爬和稳定性显著提高。机器人核心控制器采用探索者创新平台的BigFish主控板,它能够连接多种传感器,使得机器人能够高效的采集处理外部信息。为保证机器人平稳寻迹和正确转弯,机器人配置两个灰度传感器和一个近红外传感器;为提高机器人在弯道中行驶速度,除配备转向轮外,机器人前两轮加载两个标准舵机,辅助机器人在弯道中调整转弯半径,机器人整体结构如图1所示。
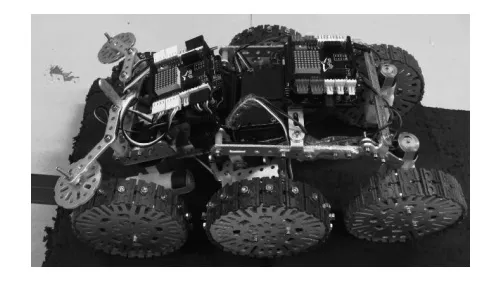
图1 全地形机器人总体结构
图1中机器人小车采用悬挂式结构防止车辆的倾覆同时提高车辆的攀爬能力,混合驱动保证机器人的动力,能够平稳快速的通过各个障碍;六轮式机器人具有越障能力高、承载能力强、结构和控制简单、转向灵活、工作效率高等优势[2]。加宽的车轮可以降低机器人轮对地面接触面的压力,起到防陷效果;设计限位转向装置,避免机器人轴距过长导致转弯半径过大的缺陷。六轮悬挂式车身设计成后两轮悬挂,前四轮一体使得机器人可以平稳攀爬高矮坡、快
机器人控制系统的结构如图2所示,工作原理是通过灰度传感器和近红外传感器获取外界环境信息,然后主控板处理、加工,让其循着黑线依次通过窄桥、U形管、楼梯、栅格等地形。主控板采集处理灰度传感器反馈的信号,并利用程序控制转向舵机,使机器人能够不断调整方向,实现寻迹行驶。近红外传感器用来辅助机器人在U形管中调整适当的转弯半径,提高机器人在弯道中行驶速度,减少在转弯过程中的因碰撞导致的动能损失。
机器人的驱动由四个直流电机和两个圆周舵机相互配合实现。当机器人在爬坡过楼梯时悬挂式车身能够保证至少四个轮子着地,保证机器人通过率,微控制器对传感器采集的信息进行处理后,对转向和行驶驱动机构实时控制,保证机器人平稳行驶。
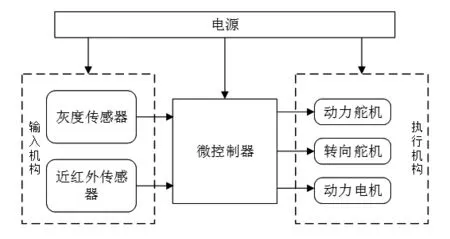
图2 全地形机器人系统结构
3 软件设计
控制软件是整个机器人小车的核心,实现寻迹、转向、行驶等控制功能。主控制板上电后首先给各个模块初始化,并使得转向舵机处于中位,直流电机启动,圆周舵机开始工作保证机器人能够直线行驶。在系统定时器的作用下以10Hz的频率传感器读取寻迹和外界信息,并以TTL电平的形式传递给主控制器[3]。灰度传感器检测到黑线时或者近红外传感器检测到进入管道时,立刻产生一个低电平信号传递给主控制器,主控制器综合传感器信息产生执行机构的控制信号,系统控制流程图如图3所示。

图3 系统控制软件流程图
3.1 传感器信号处理模块
灰度传感器可以识别白色背景中的黑色区域或悬崖边缘,并将识别信号处理传送给控制器实现寻迹行进的功能,灰度传感器可以提供稳定的输出信号,使得寻迹更加稳定准确,它的有效距离在0.7cm~3cm之间;工作电压为4.7~5.5V。近红外传感器可以发射并接收反射的近红外信号,它的有效检测范围在20cm以内,工作电压 4.7V~5.5V,频率38KHz。灰度传感器自动取样、自动计算灰度平均值,而当前灰度值与灰度平均值进行比较,输出控制信号,机器人在循迹前进时,依靠控制信号自动进行换向,实现自主控制,使得机器人能够更精确地循迹前进,调节简单[4]。
3.2 舵机驱动轮控制
圆周舵机的旋转速度和旋转方向采用PWM控制方式,脉冲周期为20ms,脉宽为500-1500us时正转,值越小,旋转速度越快;脉宽为1500-2500us反转,值越大,旋转速度越快。脉宽为1500us停止,转向舵机的旋转角度,采用PWM控制方式,脉冲周期为20ms,脉冲宽度500-2500us对应控制舵机转动0-180度。机器人动力舵机机构由两个圆周舵机构成,圆周舵机的+5V和GND分别接在控制板自带的舵机驱动口上,信号线与控制口D7、D8相连,主控制器接收传感器数据后,经过判断,产生指令,使得机器人加速或减速。机器人的转向舵机的信号线与主控板的D11、D12输出口相连。主控板产生左转或右转指令后,转向舵机得到一个占空比固定的PWM电信号,转向舵机动作,转到相应的位置。
4 结束语
机器人参考月球车和全地形四驱车设计而成,悬挂式车身和混合式驱动提高了机器人对整体赛道的通过性,并能够从容应对各类复杂地形,更好的适应环境。机器人能够适用于不同的工作环境中,为进一步的全地形赛车的设计和创新提供了很好的思路,具有一定的实际应用价值。
[1]张韬懿,王田苗,吴耀,等.全地形无人车的设计与实现[J].机器人,2013,35(6):657- 664.
[2]王福德.一种新型六轮全地形移动机器人的设计与研究[D].沈阳理工大学,2012.
[3]杨俊驹,睿,王振华,等.轮式移动机器人运动控制系统研究与设计[J].现代电子技术,2016,39(2):22-27.
[4]杨小莉,谢钦福.一种灰度传感器及一种基于灰度传感器的循迹控制方法,CN 103970136 B[P].2017.
猜你喜欢
世界汽车(2022年11期)2023-01-17
控制与信息技术(2022年3期)2022-07-08
自动化学报(2019年6期)2019-07-23
网络安全和信息化(2018年2期)2018-11-09
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
电子制作(2016年11期)2016-11-07
汽车维修与保养(2015年7期)2015-04-17
汽车维护与修理(2015年6期)2015-02-28
汽车维护与修理(2015年2期)2015-02-28
