
光纤温度和应变特性研究实验仪的开发
2018-01-26 01:26郑回归倪立成彭保进
物理通报 2018年2期
郑回归 骆 琰 倪立成 杜 靓 彭保进
(浙江师范大学信息光学研究所 浙江 金华 321004)
1 引言
光纤传感技术是伴随着光导纤维及光通信技术的发展而逐步形成的.在光传输过程中,光纤易受外界环境因素的影响,如温度、压力、电场、磁场等环境的变化将引起光波量如光强度、相位、频率、偏振态等的变化.光纤传感器就是根据这些参量随外界因素的变化关系来检测各相应物理量的大小.光纤传感器因抗电磁干扰、电绝缘性好,耐腐蚀、本质安全、灵敏度高等优点,已被广泛关注[1~3].
调查发现,目前只有少数几所高校开设了有关光纤传感的实验,而且在已经开设的实验中,一般都要求学生在比较暗的环境下用测微目镜眯着眼睛直接数出条纹移动数目或从白屏上数出移动条纹数目[4,5],而且还需要其他学生配合,记录温度和应变等数据.现有的计算机参与的相关实验中,也只是显示条纹图样,而没有对实验数据进行处理的功能,实验效果不够理想.
本文搭建了干涉型光纤传感实验平台,利用计算机与摄像头的配合取代传统的用肉眼观察白屏得到条纹移动数目的方法,利用温度传感器与计算机的结合取代传统的温度计测量,可以在计算机上同时采集到温度和移动条纹数目,实时描绘出温度和条纹移动数目的关系图,或者应力和条纹移动数目的关系.改进后的系统使得光纤特性研究的实验变得方便、灵活、条理清晰,同时也让实验更具有现代科技气息.
2 Mach-Zehnder干涉型光纤传感原理
图1所示为Mach-Zehnder相位调制型光纤干涉仪结构示意图.由激光器发出的相干光经光隔离器和分路器以后一分为二分别送入两根长度基本相同的单模光纤(即干涉仪的两臂,其一为传感臂,另一为参考臂),此两路光经合路器发生干涉.其中传感臂光纤经过加热器(以改变光纤温度)或经过拉力器(以改变应变), 使传感臂光纤的折射率和长度发生变化从而导致光程变化,引起干涉条纹的移动.
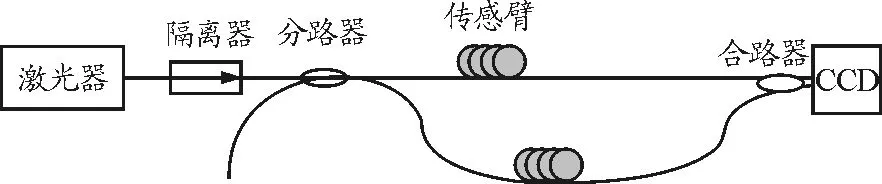
图1 Mach-Zehnder光纤干涉仪示意图
显然,这是一种双光束干涉仪,干涉光的幅度与信号光及参考光的幅度有关,其相位为两臂光相位之差.干涉场光强分布为[6,7]
(1)
(2)

干涉光信号被CCD接收,由计算机软件自动判别条纹移动数,从而得到相关的传感关系.
3 实验装置
基本硬件由激光发生器、分束镜、凸透镜、光纤、测温设备、控温设备、螺旋微拉力器、CCD(或摄像头)、计算机组成,如图2所示.
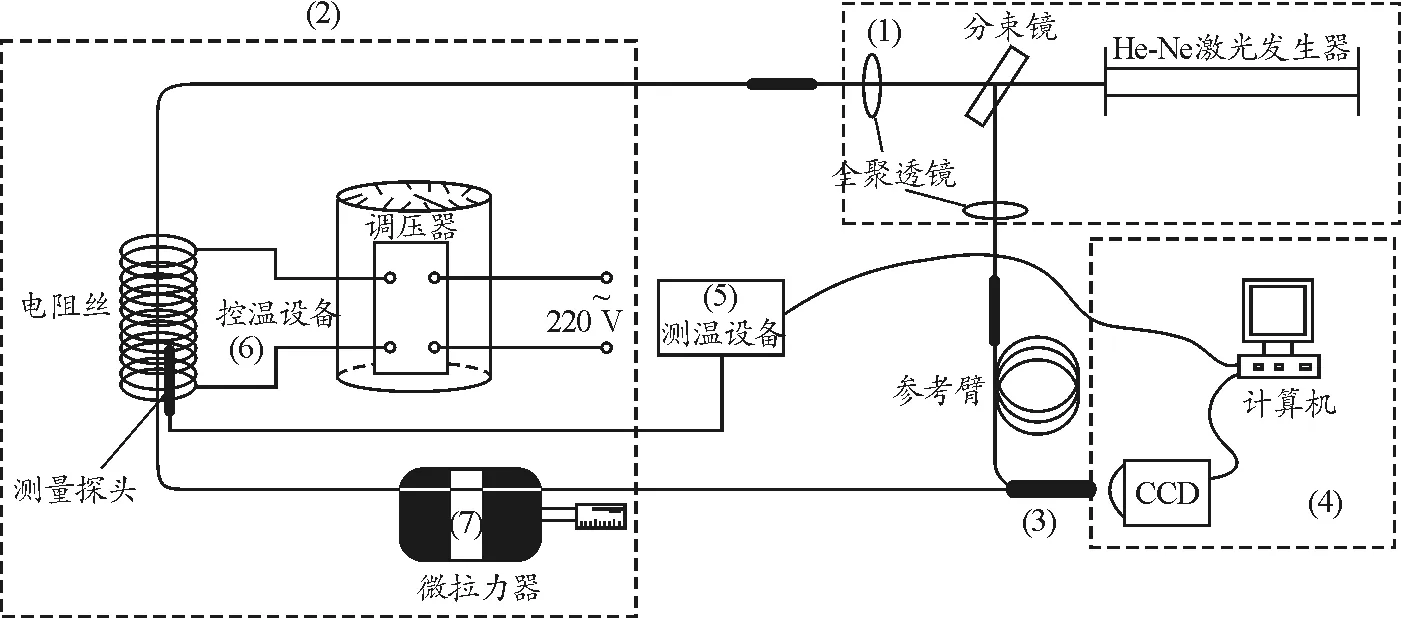
图2 实验系统的基本硬件组成
图示(1)部分的激光发生器发出的光由分束镜分成两束后,能为实验提供稳定的相干光源,从分束镜出来的两束光分别再经过两个凸透镜的汇聚作用,进入系统两臂的光纤.图示(2)部分是传感,实验中就用该部分光纤来探测温度、应力等物理量的变化.图示(3)部分将两光纤的出射端合并,产生干涉条纹.图示(4)部分是CCD(或摄像头)和计算机.图示(5)部分用以测温,由测温探头(热敏电阻)和计算机采集卡等部分组成.图示(6)部分用以控温,由电阻丝和调压器组成.调压器的输出端与电阻丝的两端相连,光纤从电阻丝的腔内穿过,调压器可由调节电阻丝两端的电压从而控制电阻丝腔内的温度.图示(7)部分是微拉力器,利用物理外力来拉伸光纤,从而研究其应变特性.图3所示为搭建的实验系统实物图.
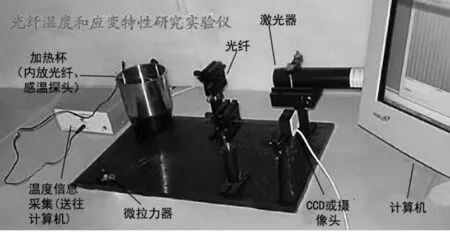
图3 实验系统的实物图
4 软件设计
软件主要由6部分组成,包括实验总界面、光纤温度特性实验界面、光纤应力特性实验界面、了解实验原理及操作步骤界面以及学生完成实验报告界面和教师批改实验报告界面[8].篇幅所限,这里仅给出干涉条纹的图像处理.
4.1 条纹宽度的计算
本实验中摄像头接收得到的条纹图像是640*480像素.条纹宽度是以像素为单位的,只要知道了屏幕上的条纹数目,根据640与条纹数目之比就能得到条纹宽度.判断条纹数的关键是正确判断亮条纹的最亮点,假如灰度分布是一个理想的正弦曲线波,可以用很多方法来得到干涉条纹的峰值,从而计算条纹的移动数.本实验仪可以进行手动测量条纹宽度和自动测量条纹宽度.
设一条与条纹方向垂直的直线为x轴,如图4所示.将像素映射在x轴上,把每一点的灰度值累加到它在x轴的射影点上,然后取平均值,得到一条以像素值为x轴、灰度值为y轴的近似正弦曲线.
自动测量条纹宽度的关键问题是计算屏幕上的条纹数目.对以像素值为x轴、灰度值为y轴、近似正弦的曲线上的各个点取导数,可能出现的4种情况如图5所示.

图4 像素的映射
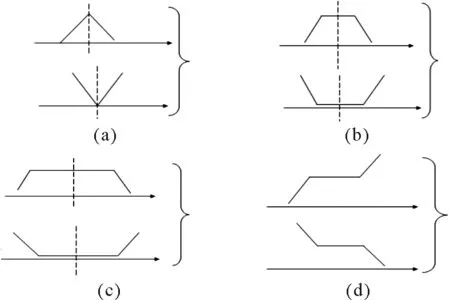
图5 取导数后的4种曲线类型
第一种情况如图5(a)所示,相邻的3个点中出现峰值,取中间点的坐标为峰值位置;
第二种情况如图5(b)所示,相邻的4个点中出现峰值,取中间两点坐标的平均值为峰值位置;
第三种情况如图5(c)所示,在饱和情况下,相邻的多个点都是峰值,取饱和长度的中间点为峰值位置;
第四种情况如图5(d)所示,不出现峰值.
4.2 条纹移动数目的判别
本实验仪的重点是读取条纹的移动数目.计算只在屏幕范围内条纹的移动数目很简单,只需要选定一根条纹进行跟踪,记录这根标记条纹经过的位移,那么这根条纹的位移与条纹宽度值之比就是条纹的移动数目.
判断条纹移动数目的关键问题是如何测量超量程(标记条纹移出视野范围)的移动条纹.本实验使用的方法如图6所示.
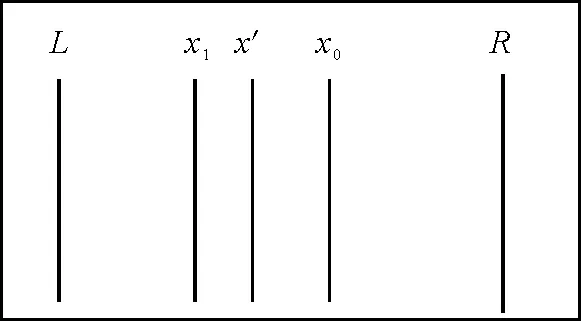
图6 超量程测量法示意图
图6中,x0为初始基准线,L为左跳跃边界,R为右跳跃边界,x1为跳回时的初始位置,x′为跳回后的峰值跟踪位置,x为所跟踪的峰值的实际位置.
实验开始时,设置一条初始基准线x0.当跟踪的直线到达R或者L的时候就立即跳回至x1,如果x1不是峰值位置,马上寻找到最近的峰值x′,再接着跟踪.假定跳回一次,则
x-R=x′-x1
那么实际直线的位移为
x-x0=(x-R)+(R-x0)=
x′-x1+(R-x0)=
(x′-x0)+(R-x1)
设置一个参量xSum,初始值为零.直线每跳回一次,将R-x1累加到xSum中,那么最终的公式为
x-x0=(x′-x0)+xSum
即这根条纹的总位移.条纹的位移与条纹宽度之比就是条纹移动的数目.
5 实验结果
实验过程界面图如图7和图8所示.两图的右上角分别为实时描绘出的干涉条纹移动数与温度和应变的关系图,左下角的文本框实时报告当前温度(研究温度特性时)及条纹的移动数.研究温度特性时,可根据需要由软件设定每隔多少度自动记录一次(图7所示为每隔2 ℃记录一次);研究应变特性时,一边转动螺旋微拉力器,一边可直观看到屏幕上报告的条纹移动数,根据需要点击按钮记录数据.实验过程中,为了便于区分,在条纹向左移动的时候,在条纹的移动数前加“-”号,在条纹向右移动的时候,在条纹的移动数前加“+” 号.通过标准温度计及人工方法用白屏读条纹数比对,本系统实验相对误差小于5%,可满足学生实验的需要.

图7 光纤温度特性实验结果

图8 光纤应力特性实验结果
6 结束语
本实验系统将光纤传感与摄像头、计算机等融为一体,注重与前沿科学技术之间的衔接,注重提升学生学习能力,加强科研及动手实践环节的训练,把学生从枯燥乏味的重复性观测、读数中解放出来,把精力放在实验本身的理解与分析上,实验效果好.有以下特点:
(1)用低成本的市售摄像头代替传统的人眼读数或昂贵的线阵CCD;
(2)计算机自动记录光干涉条纹的移动数;
(3)对于温度传感的实验,利用温度传感器替代传统温度计,实时报告当前光纤温度,读数方便;
(4)计算机根据用户设定,在屏幕上直观地描出温度与相位关系曲线图和应变与相位关系曲线图;
(5)学生可在系统上做实验报告,教师可在系统上批改实验报告;
(6)将计算机辅助教学思想融入其中,实验中的每一步及相关原理都在软件中有恰当的提示,方便学生对实验的分析和理解.
1 Zhao Yong, Wang Dan, et al. A novel optical fiber temperature sensor based on Fabry-Perot cavity, Microwave and Optical Technology Letters, 2013, 55(10):2 487~2 490
2 张正文. 分布式光纤温度传感系统的设计及优化:[学位论文].淮南:安徽理工大学,2016
3 宫顺顺,李丽君,蒋露,等. 一种全光纤Mach-Zehnder干涉式温度传感器设计. 中国新通信,2017(02):26~28
4 尚玉峰,吴重庆,刘学,等.光纤Mach-Zehnder空间干涉系统的实验研究. 大学物理,2004,23(4):35~38
5 陈伟成,严伟国.基于迈克尔逊干涉仪的光纤传感实验.仪器仪表用户,2010,17(2):69~70
6 廖延彪.光纤光学.北京:清华大学出版社,2001.11~32
7 彭保进,廖茂,廖延彪,等.光纤水听器灵敏度测试的研究.光子学报,2005,34(11):1 633~1 638
8 彭保进,李勇,金洪震. 让计算机与普通物理实验“结缘”. 实验室研究与探索,2001,20(5):37~40
9 李涛,戴玉堂,赵前程. 一种新型微结构高灵敏度光纤温度传感器. 光电子·激光,2014(04):625~630
10 陈雪. 干涉型微结构光纤传感器的传感特性研究:[学位论文].深圳:深圳大学,2015
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
小猕猴智力画刊(2021年6期)2021-08-05
小福尔摩斯(2019年2期)2019-09-10
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
电子制作(2018年23期)2018-12-26
中国民族医药杂志(2016年5期)2016-05-09
作文大王·低年级(2016年3期)2016-03-11
娃娃画报(2014年9期)2014-10-15
