基于三维激光扫描技术的数据处理及模型重建
2018-01-24 05:55唐雯
山西建筑 2018年2期
唐 雯
(1.上海理工大学环境与建筑学院,上海 200093; 2.上海师范大学建筑工程学院,上海 201418)
1 概述
三维激光扫描技术是一门新兴起的测绘技术,通过该技术可以有效获取被测物体的点云数据,并通过专用逆向软件实现被测物体的模型重建。
目前它的使用价值十分突出,在很多领域都有杰出表现,在文物保护、工程监测、结构改造、工艺加工、城市数字化等领域有着广泛的应用前景。
本文借助某体育场为契机,研究分析三维激光扫描技术获取建筑物点云数据及三维模型重建方法。
2 地面三维激光扫描仪工作原理
现场实地作业扫描某体育场时,采用的仪器是Leica公司生产的ScanStation C10三维激光扫描仪,属于地面型三维激光扫描系统。根据扫描系统的区别,属于固定式三维激光扫描系统,包含三维激光扫描仪、扫描控制系统、内置电池、配套数据处理cyclone软件等组件构成。
原理上基于脉冲测距法,是一种高速激光测时测距的有效技术。这种测距系统的理论测距范围可达到几百米甚至上千米的测距距离(然而,在实际操作中,对于某体育场的扫描有效距离基本上在200 m多左右)。
三维激光扫描仪在目标物后,获取对象表面上每个采集点的坐标后,最终汇总成一个点的集合,称为“点云”(Point Clouds),每个坐标点的原始观测值是一个测绘距离和两个角度值。三维扫描仪最终获取的是目标物的三维空间坐标(X,Y,Z)、激光束反射的强度以及目标物的内在信息属性。
通常情况下,把仪器中心设置成激光束发射处,扫描测量为仪器自定义坐标系。Z轴位于仪器的竖向扫描面内,向上为正,与横向扫描面垂直;X轴位于仪器的横向扫描面内,与Z轴垂直;Y轴位于仪器的横向扫描面内,与X轴垂直,同时,Y轴正方向指向物体,且与X轴、Z轴一起构成右手坐标系,激光发射器发出强劲的激光脉冲信后,经过反射,接收器收集反射回来的激光回波信号,可以计算出点P到扫描仪距离观测值S,并且可以同时得到测量每个横向扫描角度观测值α和纵向扫描角度观测值θ如图1所示,从而可以获得P的坐标(x,y,z)。
利用徕卡ScanStation C10三维激光扫描仪,扫描镜头可以垂直方向进行270°的旋转扫描,水平旋转装置是为了保证扫描仪在水平面方向上的360°无障碍扫描,从而获取三维点云数据,可以获得点P的三维坐标如式(1)所示。
三维激光扫描点坐标(X,Y,Z)的计算公式如下:

(1)

扫描后,获取到的点云数据,由配套专用逆向软件cyclone进行点云数据化,并以*.imp格式保存,通常,鉴于扫描物体外形的差异,经常需要设立多个测站点进行扫描,以防止建筑物数据的缺失,更好地获取建筑物深层数据。
3 点云数据处理
为了保证后期的三维模型构建的效果及精度,在获取三维点云数据后,需要使用一些滤波算法过滤掉现场作业时背景等遮挡物的点云数据和离散点,保留目标物的主点云数据,这过程称为点云数据的预处理。点云拼接、点云去噪、点云滤波、数据压缩、点云封装等都是点云数据预处理的手段。
点云的拼接。
对于大型建筑物,在三维扫描过程中,每个测站点下扫描获取的数据,是在这个测站点的独立坐标系下产生。把多个不同的独立坐标系下的点云集合拼合在一起,生成单一的完整坐标系统的过程,就称之为点云拼接。点云拼接可以区分为基于标靶拼接、基于控制点拼接以及基于点云拼接,在本文中,采用标靶拼接。
拼接步骤如下:在cyclone软件中,打开菜单栏【creat】→【Registration】命令,执行菜单栏【ScanWorld】→【Add ScanWorld】命令,导入每个测站点扫描信息,在现场三维激光扫描的过程中,我们扫描了靶标,因此执行菜单栏【Constraint】→【Auto-Add Constraints】命令来自动添加标靶信息,点击菜单栏【Registration】→【Register】命令进行拼接。

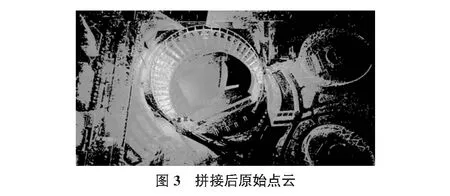
分析拼接后的结果,如图2所示,拼接后点云数据的最大误差为3 mm。一般情况下,误差小于6 mm是能够接受的,选择菜单栏【Registration】→【Create ScanWorld/Freeze Registration】命令将整个拼接冻结,菜单栏【Registration】→【Create and Open ModelSpace】命令,如图3所示,展示拼接成果。
4 模型重建
对于扫描所获得的点云数据,最终目的是为了实现所测目标物的模型重建。通过模型来准确地表现扫描对象的信息属性。本文利用专用逆向工程cyclone软件,把通过预处理后的点云数据,拟合还原实物原型。简要构建流程如下。
4.1 复杂点云的分割
对于像体育场那么繁杂的点云,难免会发生构件结构的观察不够直观,会出现构件周围有遮挡其属性的点云的存在,为方便观测清晰、立体,采用分割功能(pick mode)把需要观察的构件从原始点云分割拷贝到新的模型空间中,确保所选构件在独立清晰的空间视角中建模,同时,此法也帮助删掉建筑物背面的遮挡点云。
打开ModelSpace视口,在Pick Mode选择模式下,选择切割的点云。然后在Fence Mode选择模式下,用鼠标勾勒出一个框,在ModelSpace窗口,执行【Create Object】→【Segment Cloud】→【Cut by Fence】命令,切割框选的点云。所切割的点云生成为一个独立的子集点云。旋转点云,确保切割后点云背面没有遮挡物体的点云。
4.2 支撑体系的主要构件重构
对于柱和梁的构建,采取分段建模的方式进行处理,对柱点云的分割,选择菜单栏【File】→【Launch】→【Copy Selection to New ModelSpace】命令,把分隔出来的柱点云创建在一个临时ModelSpaces窗口中,在此临时ModelSpaces窗口对柱进行拟合,柱的拟合利用多选工具点击钢柱点云上的两处点,执行【Create Object】→【Region Grow】→【Cylinder】命令对柱进行建模,拟合后合并到原始ModelSpaces中去,完成对柱的构建,如图4,图5所示。


类似于柱点云的分割,在对梁点云进行分割后,选取一段梁,用多选工具点击这段梁上的点云,然后用【Create Object】→【Region Grow】→【Cylinder】命令对这段梁进行建模,以此类推,完成一段梁的分段拟合。
两段梁之间的链接用多选工具点击已经拟合后的两段梁,执行【Tool】→【Piping】→【Reducer Connectors】命令来处理两段梁之间的直线链接问题,使得链接处拟合的更佳平滑。
5 结语
该文结合某体育场三维扫描建模的实例,着重在于研究基于三维激光扫描技术的模型重建方法,介绍了点云数据拼接预处理方法,在模型重建中,运用专业逆向软件cyclone探讨了建筑支撑系统构件的重建方法。在今后的工程实际中,会有很好的运用前景。
随着社会的进步,技术的革新,三维数据处理软件不断涌现,积极推动着三维扫描技术向着高智能、高效率以及高精度的方向努力发展,如何将现实世界的三维立体目标有效转换PC应用处理的数据,是值得我们今后一直去研究和拓展的课题。
[1] 张维强.地面三维激光扫描技术及其在古建筑测绘中的应用研究[D].西安:长安大学,2014.
[2] 谢宏全,谷风云.基于激光点云数据的三维建模应用实践[M].武汉:武汉大学出版社,2014:1-2.
[3] 李 滨.徕卡三维激光扫描系统在文物保护领域的应用[J].测绘通报,2008(6):72-73.
猜你喜欢
娃娃乐园·综合智能(2022年3期)2022-04-19
文物春秋(2020年6期)2020-12-01
读者·校园版(2020年17期)2020-09-02
模具制造(2019年3期)2019-06-06
军营文化天地(2018年2期)2018-04-20
山东工业技术(2016年1期)2016-04-22
中国老区建设(2016年9期)2016-02-28
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
CHIP新电脑(2015年10期)2015-10-15
现代营销·经营版(2015年3期)2015-04-20