基于ADAMS的六自由度机器人关节驱动力矩仿真分析
2018-01-24 11:56王一辉
中国设备工程 2018年1期
王一辉
(中车株洲电机有限公司,湖南 株洲 412000)
机器人动力学研究机器人运动与关节驱动力(矩)之间的动态关系,处于不同位置的机器人,各关节的有效惯量及耦合量都是时变的,因此,各关节的驱动力(矩)也是时变的。机器人动力学研究两类问题:各执行器驱动力(矩)已知,求解关节位移、速度和加速度的动力学正问题;关节位移、速度和加速度已知,求解关节力(矩)的动力学逆问题。本文讨论在机器人本体设计开发中具有重要实际意义的动力学逆问题。
1 机器人动力学分析
机器人动力学的Lagrange(拉格朗日法)是基于能量项(动能T、势能V)对系统变量及时间的微分而建立的。对于任何机械系统,拉格朗日方程为:

L为拉格朗日函数,Ek为系统总动能,Ep为系统总势能。
系统动力学拉格朗日方程:

将式(1)代入式(2)中,可写成:
人工计算六自由度机器人的动力学方程工作量非常大,且很难保证结果的准确性,故借助ADAMS仿真软件对机器人进行动力学分析,求出各关节峰值扭矩。
2 机器人动力学仿真模型
在UG中建立的六自由度机器人三维模型,负载6kg,做动力学分析时对模型做些简化:①零部件统一刚体化;②省去倒角、细孔等一些对仿真结果影响不大的细节特征。模型从UG中导入到ADAMS中,统一单位,并且使得ADAMS模型的质心坐标系与UG的质心坐标系一致。ADAMS中建立好的机器人虚拟样机模型如图1所示。
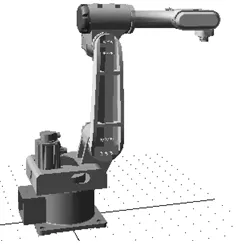
图1
3 机器人动力学仿真
样机设计阶段,采用有路径搜索求解关节峰值扭矩Tmax,即结合机器人实际操作情况,选定一些工作路径(极限工作状况的极限空间位置)进行动力学仿真,求解其Tmax。其思路:每个关节选定几个工况,分别对各工况仿真,得出仿真数据,求解出的最大扭矩是其操作情况下的极限值,可以作为关节峰值扭矩的参考值。
3.1 机器人零位置状态
将机器人调整到大、小臂水平伸直成一条直线(零位置状态),如图2所示。
3.2 关节一峰值扭矩求解

图2
机器人零位置状态上设定其余关节以单轴最快角加速度α启动,模拟各关节耦合情况。一关节的T受四、五、六关节的θ变化影响不大,为了降低求解规模,我们只设定了第二、第三关节的α,不设定四、五、六关节。
关节一仿真工况如表1、运动模式如表2所示。

表1 关节一各工况表
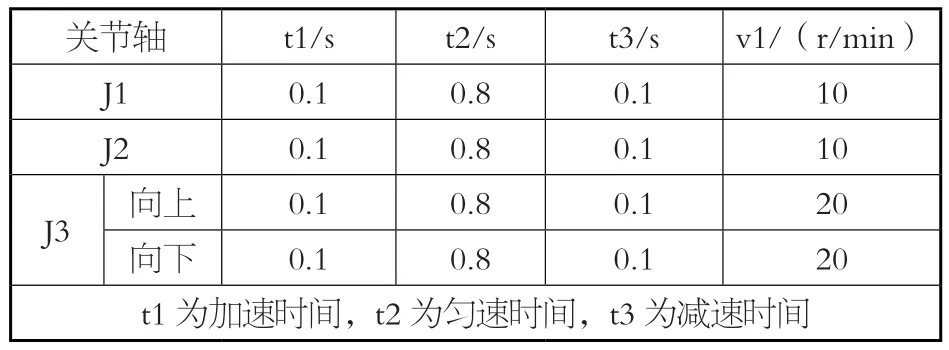
表2 关节一各轴运动模式
对表3各工况进行仿真,结果整理如图3~8。
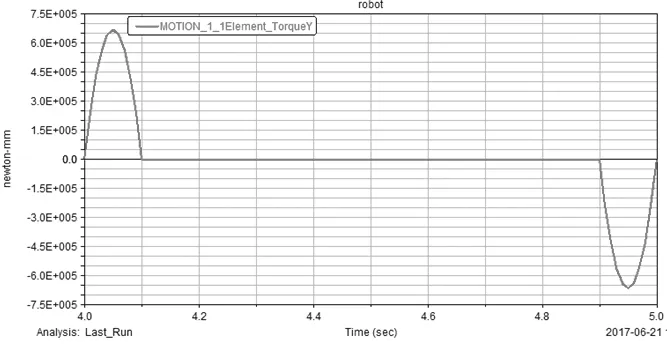
图3 工况一驱动扭矩
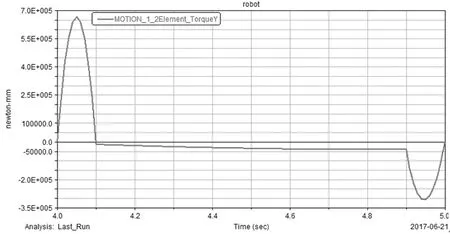
图4 工况二驱动扭矩
关节一电机扭矩(如表3)。
工况一为J1轴单独运动,其余各工况为关节耦合运动。由表可知,工况一的数值和其余各工况数值不同,说明关节耦合运动影响关节扭矩的求解;数值变化不大,因为机器人处于零位置状态,J1启动时只有启动惯性矩,不管J2、J3如何加速启动,对回转中心的转动惯量改变不大。选取工况六的681.7N为一关节的峰值扭矩参考值。

表3
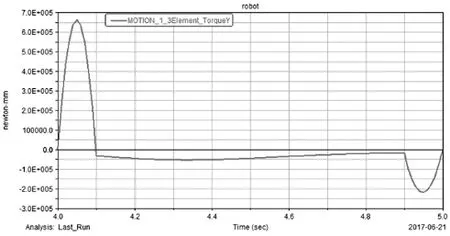
图5 工况三驱动扭矩
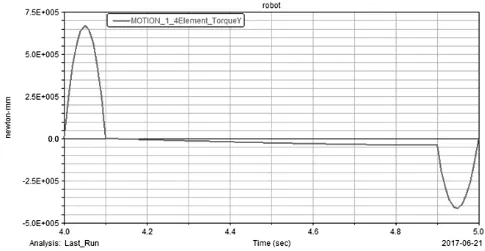
图6 工况四驱动扭矩
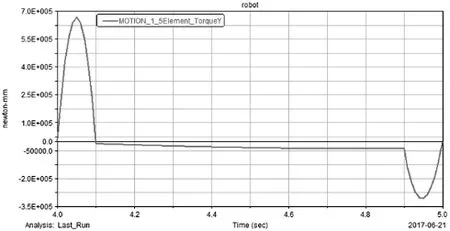
图7 工况五驱动扭矩
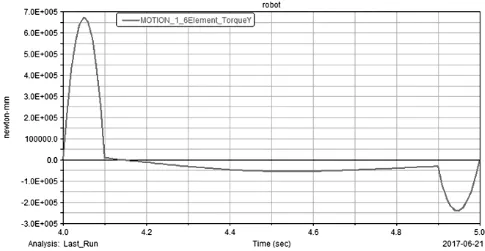
图8 工况六驱动扭矩
[1]霍伟.机器人动力学与控制[M].北京:高等教育出版社,2005:7-8.
[2]李庆玲,赵永生.六自由度工业机器人动力学分析与仿真[J].上海机电学院学报,2008,11(4):275-276.
[3]蔡自兴.机器人学[M].北京:清华大学出版社,2000:89-92.
猜你喜欢
少先队活动(2022年9期)2022-11-23
中国临床医学影像杂志(2022年6期)2022-07-26
装备制造技术(2020年2期)2020-12-14
商品与质量(2020年41期)2020-11-09
杂文选刊(2019年12期)2019-12-06
新青年(2018年8期)2018-08-18
幸福·婚姻版(2018年12期)2018-02-22
凿岩机械气动工具(2017年3期)2017-11-22
中国惯性技术学报(2015年1期)2015-12-19
太空探索(2014年3期)2014-07-10