无人机在工程爆破现场中的应用研究
2018-01-22 09:54:35陈金德
上海电气技术 2017年3期
陈金德
广东振声科技股份有限公司 广东梅州 514700
1 技术背景
工程爆破的前景正朝着精细化、科学化、数字化方向发展[1]。对工程爆破项目进行信息化管理,整个系统主要包括中心服务器单元、仓库服务器单元、车辆运输视频监控系统单元、爆破现场视频监控系统单元、爆破现场管理单元、爆破环境数据采集单元、爆破警戒人员定位确认单元等[2-4],系统拓扑图如图1所示。此外,爆破现场视频也可采用工程车系统[5]。
当前爆破现场主要采用便携式设备进行视频监控,虽然可以通过云台控制摄像头进行拍摄角度、远近的调整,但存在以下缺点。
(1) 现场需要有人员兼职进行云台控制,爆破作业一旦工作量比较饱满,兼职人员可能会忘记对云台进行控制。
(2) 当爆破工程巨大、设备需要远离爆破中心点时,随着距离的增大,对设备的要求提高,成本也随之增高,同时设备的质量、体积也随之增大,造成工作量、工作强度增加。
(3) 对某些特殊场合,如炸药卸车等,人、物可能会产生遮挡,导致无法完整清晰地监控爆破作业。
针对以上存在的缺点,笔者设计了一种无人机自动飞行程序[6-9],并搭建工程爆破信息化智能管控系统。无人机监控方案流程如图2所示。
系统后台编程,通过发送指令控制无人机在具体的时间点,对设定的爆破作业点进行盘旋,寻找目标后静止航拍。
若无航拍作业,则无人机在三脚架上进行静止全景监控拍摄和充电,此时的功能相当于便携式设备。
通过后台控制程序,视频信息实时传输至系统后台。

图1 工程爆破项目信息化系统拓扑图
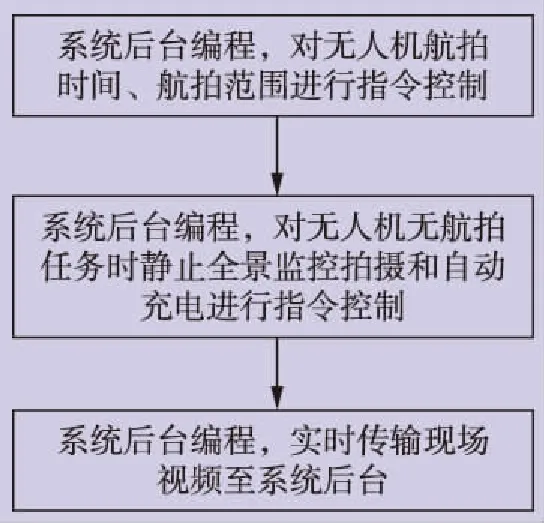
图2 无人机监控方案流程图
2 技术要点
2.1 关键参数确认
在地图勘察方面,可采用无人机进行1∶1000地形图勘察测绘[10],也可采用人工携带全球定位系统(GPS)设备进行勘察。勘察后的地图采集流程如图3所示。
在项目勘察阶段时,对爆破地点的地理位置、地理环境进行详细勘察,得出爆破现场的详细地图S1。
在设计项目爆破方案时,确定民爆物品卸车的位置、警戒线范围、警戒范围,并在地图S1上标识,输出地图S2。
在设计项目分次爆破方案时,确定每次爆破的作业中心点、人员签到位置、无人机放置位置,在地图S2上标识,输出地图S3。
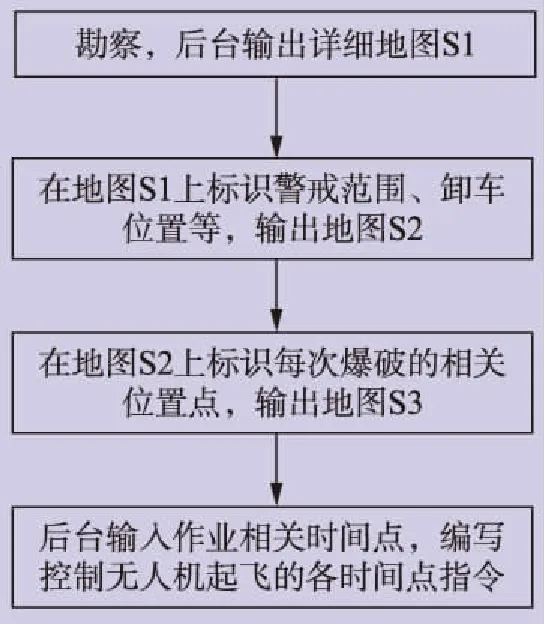
图3 地图采集流程图
将分次爆破的地图S3、项目作业起止时间t、人员签到时间t1、民爆物品卸车时间t2、装药时间t3、联网时间t4、警戒时间t5、爆破时间t6等数据输入无人机。
2.2 关键参数与无人机动作
无人机在充电期间监控的范围为S1,在时间t内全程监控。
在时间t1内,无人机需飞至地图S3上标识的人员签到位置上空,对人员签到进行视频监控。
在时间t2内,无人机需飞至地图S2上标识的民爆物品卸车位置上空,对民爆物品卸车过程进行视频监控。
在时间t3~t4内,无人机需在一定时间间隔内飞至地图S2上标识的警戒线上空或在三脚架上,对地图S3上标识的作业中心点装药、雷管联网过程进行视频监控。
在时间t5内,无人机飞行至地图S2上标识的警戒线上空进行盘旋视频监控。
在时间t6内,无人机可在三脚架上或飞行至地图S2上标识的警戒线上空,对地图S3上标识的作业中心点爆破过程进行视频监控。
无人机所有的飞行范围应在地图S2上标识的警戒范围外,且在地图S1范围内。
2.3 自动充电
如图4所示,两个圆形导轨分别与电池的正负极连接。无人机的充电口与导轨之间采用微电机控制可伸缩导杆,当无人机处于飞行状态和飞落至三脚架充电前,伸缩导杆处于收缩状态;当无人机停稳至三脚架后,伸缩导杆伸展,分别接触导轨,使无人机自动充电。

图4 无人机自动充电示意图
如图5所示,无人机寻找三脚架过程如下:① 无人机记忆当前三脚架的地理位置信息;② 无人机通过当前已记忆的三脚架地理位置信息,确定大致位置,飞回;③ 当无人机在三脚架上空时,接收到由导轨中间红外感应发出的信号,确定具体位置;④ 当无人机已触碰底盘时,无人机停止下降;⑤ 伸缩导杆伸展,无人机自动充电。
无人机在三脚架上充电时,摄像头需自动对准作业中心点。

图5 无人机寻找三脚架流程图
2.4 警戒人员定位及地图更新
警戒人员佩戴GPS定位对讲机,对警戒信息进行语音和GPS双向定位。当警戒人员就位后,GPS信息上传至平台,需要对S2的范围进行修改,以确定警戒线外围监控范围,S2地图更新,便于无人机对各个点进行重点监控。警戒位置示意图如图6所示。

图6 警戒位置示意图
第一步:确定A、B、C、D四点位置。
(1) 采集各个警戒点的经纬度坐标。
(2) 通过各个数据对比得到A(纬度最大)、B(经度最小)、C(纬度最小)、D(经度最大)四点坐标。
第二步:确定区域。
假设除A、B、C、D四点外的各点坐标为xn(mxn,nxn),则可以划分出以下5大区域。
(1)mmin≤mxn≤mA,且nB≤nxn≤nmax,则处于区域AB,即图6中蓝色虚线区域。
(2)mmin≤mxn≤mC,且nmin≤nxn≤nB,则处于区域BC,即图6中黄色虚线区域。
(3)mC≤mxn≤mmax,且nmin≤nxn≤nD,则处于区域CD,即图6中紫色虚线区域。
(4)mA≤mxn≤mmax,且nD≤nxn≤nmax,则处于区域DA,即图6中绿色虚线区域。
(5) 其余的点在区域IN中。
第三步:确定斜率kAB及直线l(mn,nn)方程。
(1) 确定区域AB的斜率和直线lAB方程:kAB=(nmax-nB)/(mA-mmin),nn=nB+kAB(mn-mmin)。
(2) 确定区域BC的斜率kBC和直线lBC方程:kBC=(nB-nmin)/(mmin-mC),nn=nmin+kBC(mn-mC)。
(3) 确定区域CD的斜率kCD和直线lCD方程:kCD=(nD-nmin)/(mmax-mC),nn=nmin+kCD(mn-mC)。
(4) 确定区域DA的斜率kDA和直线lDA方程:kDA=(nmax-nD)/(mA-mmax),nn=nD+kDA(mn-mmax)。
第四步:判断警戒点细分区域。
(1) 在区域AB中的点,经度数据分别代入lAB方程,得出直线上的纬度信息nxAB,若nxAB (2) 在区域BC中的点,经度数据分别代入lBC方程,得出直线上的纬度信息nxBC,若nxBC>nn,则该点属于区域B_C,需要进一步处理;若nxBC≤nn,则该点属于区域C_B,无需进一步处理,放弃该点。 (3) 在区域CD中的点,经度数据分别代入lCD方程,得出直线上的纬度信息nxCD,若nxCD>nn,则该点属于区域C_D,需要进一步处理;若nxCD≤nn,则该点属于区域D_C,无需进一步处理,放弃该点。 (4) 在区域DA中的点,经度数据分别代入lDA方程,得出直线上的纬度信息nxDA,若nxDA 第五步:确认需要连线点。 (1) 在区域A_B内,点xn(mxn,nxn)和点A取斜率,斜率最小的点确认需要与点A连接。点xn’(mxn’,nxn’) 和点B取斜率,斜率最大的点确认需要与点B连接。点xn(mxn,nxn)和点xn’(mxn’,nxn’)如果是不同点,则两点连接,否则完成区域A_B的连线。 (2) 在区域B_C内,点xn(mxn,nxn)和点B取斜率,斜率最小的点确认需要与点B连接。点xn’(mxn’,nxn’) 和点C取斜率,斜率最大的点确认需要与点C连接。点xn(mxn,nxn)和点xn’(mxn’,nxn’)如果是不同点,则两点连接,否则完成区域B_C的连线。 (3) 在区域C_D内,点xn(mxn,nxn)和点C取斜率,斜率最小的点确认需要与点C连接。点xn’(mxn’,nxn’) 和点D取斜率,斜率最大的点确认需要与点D连接。点xn(mxn,nxn)和点xn’(mxn’,nxn’)如果是不同点,则两点连接,否则完成区域C_D的连线。 (4) 在区域D_A区域内,点xn(mxn,nxn)和点D取斜率,斜率最小的点确认需要与点D连接。点xn’(mxn’,nxn’)和点A取斜率,斜率最大的点确认需要与点A连接。点xn(mxn,nxn)和点xn’(mxn’,nxn’)如果是不同点,则两点连接,否则完成区域D_A的连线。 (5) 在区域IN内无需连线。 如图7、图8所示,基于无人机的工程爆破信息化智能管控系统在爆破工程中使用,取得了良好的应用效果。 无人机与信息化技术相结合,搭建工程爆破信息化智能管控系统,采用后台系统预编程与警戒点实时位置变化指令控制无人机飞行范围,实现爆破现场作业面的监控。同时,系统设计的自动充电功能,保证了无人机能够在爆破作业过程中连续工作。这一系统实现了爆破现场视频监控的无人化操作,保证了数据的准确性和唯一性,为监管部门对爆破现场的有效监管提供了管理依据。 图7 系统应用效果界面 图 8 工程现场爆破视频截图 [1] 汪旭光.爆破设计与施工[M].北京:冶金工业出版社,2011. [2] 曲广建,朱振海,汪旭光,等.远程视频监控技术研究及在工程爆破中的应用[J].工程爆破,2012,18(3):81- 84. [3] 陈金德,董桂林,饶志勇.信息化智能管控系统在爆破工程的应用[J].煤矿机电,2016(6):109-112. [4] 陈金德,张常寿,李波,等.监管部门对爆破现场信息化的管理系统及其使用方法:CN201610689604.0[P].2017-01-04. [5] 陈金德,黄志平,邓水朋,等.工程爆破信息化智能管控系统:CN201520394567.1[P].2015-09-16. [6] 张轶,陈欣琳.无人机起飞重量设计及估算研究[J].机械制造,2011,49(3):23-26. [7] 肖堃,闫杰,靳文平.基于TMS320F28335的无人机机载智能接口卡设计[J].机械制造,2013,51(10):17- 20. [8] 陈金德,张常寿,李波,等.爆破现场无人机监控的控制方法:CN201610258814.4[P].2016-08-31. [9] 万刚,余旭初,布树辉,等.无人机测绘技术及应用[M].北京:测绘出版社,2015. [10] 王鹏.浅析无人机1∶1000地形图测绘中的应用及实践[J].华北国土资源,2013(6):83-85.3 应用效果
4 结论

 猜你喜欢
物理之友(2020年12期)2020-07-16 05:39:16小哥白尼(军事科学)(2018年9期)2018-12-08 08:18:44小哥白尼(军事科学)(2018年8期)2018-09-12 02:07:56小哥白尼(军事科学)(2018年6期)2018-09-10 05:56:24小哥白尼(军事科学)(2018年1期)2018-05-25 02:24:52福建中学数学(2016年7期)2016-12-03 07:10:28光学精密工程(2016年1期)2016-11-07 09:01:53恋爱婚姻家庭·养生版(2016年7期)2016-07-05 22:23:48电测与仪表(2016年6期)2016-04-11 12:05:54轻兵器(2015年20期)2015-09-10 07:22:44
猜你喜欢
物理之友(2020年12期)2020-07-16 05:39:16小哥白尼(军事科学)(2018年9期)2018-12-08 08:18:44小哥白尼(军事科学)(2018年8期)2018-09-12 02:07:56小哥白尼(军事科学)(2018年6期)2018-09-10 05:56:24小哥白尼(军事科学)(2018年1期)2018-05-25 02:24:52福建中学数学(2016年7期)2016-12-03 07:10:28光学精密工程(2016年1期)2016-11-07 09:01:53恋爱婚姻家庭·养生版(2016年7期)2016-07-05 22:23:48电测与仪表(2016年6期)2016-04-11 12:05:54轻兵器(2015年20期)2015-09-10 07:22:44