
基于LabVIEW的汽车激光测速
2018-01-18 08:09:30
自动化与仪表 2017年10期
(交通运输部天津水运工程科学研究院,天津 300456)
随着城市经济发展速度的加快和出行的增加,城市交通已成为中国交通系统发展的“瓶颈”,特别是大、中城市,由于车辆增加速度较快,许多城市都还处于建设发展期,因此,车辆、行人和道路之间的矛盾日益突出,道路交通问题日益严峻。比如交通堵塞和交通事故频发,又给人们的生活增添了烦恼和不幸。据调查,交通堵塞很大程度上是因为部分驾驶者不遵守交通规则导致交通事故所致,而每100例交通事故中,由于超速行驶造成的又占60%以上。而且凡是由于超速所导致的交通事故,大部分都是恶性事故,对驾驶者、乘员以及第三者都造成严重伤害。所以,超速行驶问题,在交通安全中至关重要。因此研制一种测速系统十分有必要,基于激光原理的测速方法很早就被人提出来,但由于其安装困难一直没有得到广泛的应用,本文提出的基于LabVIEW的汽车激光测速在根本上提高了数据运算速度,提高了测量精度[1]。
1 汽车激光测速原理
把激光运用于测速领域很早已经被人提出来,目前激光测速方法主要有脉冲法测速和相位法测速,虽然激光相位测速方式的测量精度比脉冲激光测速方式要高,但是脉冲激光测速却有以下几项优点:(1)在相同的总平均光功率输出的条件下,脉冲激光测速系统可测量的距离远比相位激光测速系统要大。主要是因为脉冲激光通常可以有很高的瞬间输出激光功率,使较远处的目标物仍能反射回足够被检测到的光信号强度;(2)测量速度较快,脉冲激光测距只需要收到回波脉冲即结束计时,所以采取某些计时方式时,其单次测量所需要的时间非常短,而理想情况下连续2次测量就可以得到目标物体的瞬时速度。反之,由于相位法所测量的是2个“连续信号”间的相对相位差,因此在测量时间上也比较费时,这对于汽车激光测速是一项不利因素;(3)对于相位调制,影响激光测量精度的除大气温度、气压和湿度等外在因素外,还包括系统自身的激光发射功率、测量平均次数和调制频率及其稳定性等参数。而且,如果光电信号与调制源具有相同的频率,就会限制测相精度。这是由于调制源存在与光电信号频率相同的泄漏场,它与光电信号发生相干作用,降低了信噪比特别是在回波信号很弱的时候。因此这种方法受系统和自身影响比较大;(4)不需要合作目标,隐蔽和安全性能好。相位激光测速通常需要合作目标,并且在目标物处放置反射镜等装置,来提高回波功率,而脉冲激光测速有很高的瞬时功率,不需要目标有合作性,其隐蔽性和安全性均较高。
通过对上述几种测量方法的比较可以看出,不同的测量方法适合于不同测距范围,脉冲测量法适合于远距离的测量,相位测距法适合于中远距离的测量,测量的精度随着测量距离的要求各不相同。
本文主要针对的是民用的交通测速,在远程和精度不高的情况下,脉冲测速功率较大、易实现,整个系统较其他方法易达到使用者需求。因此,脉冲测速法无疑是最好的一种方法。所以下文主要介绍脉冲法测速[2-3]。
脉冲激光测速是在测距的基础上实现测速。而激光测距是利用激光脉冲持续时间极短,能量在时间上相对集中,瞬时功率很大的特点进行测距,在有合作目标的情况下,脉冲激光测距可以达到极远的测程,在进行几百米的近程测距时,如果精度要求不高,即使不使用合作目标,只是利用被测目标对脉冲激光的漫反射所取得反射信号,也可以进行测距和测速。系统工作时,激光由发射单元发射,以光速到达目标物后反射回来被接收单元接收通过距离计算与显示单元得到目标物距离,进而由连续测量距离得到某段时间内的平均速度,因为这个测量时间极短,因此这个平均速度可以认为是瞬时速度,即实现脉冲激光的测速。脉冲法测速原理如图1所示。
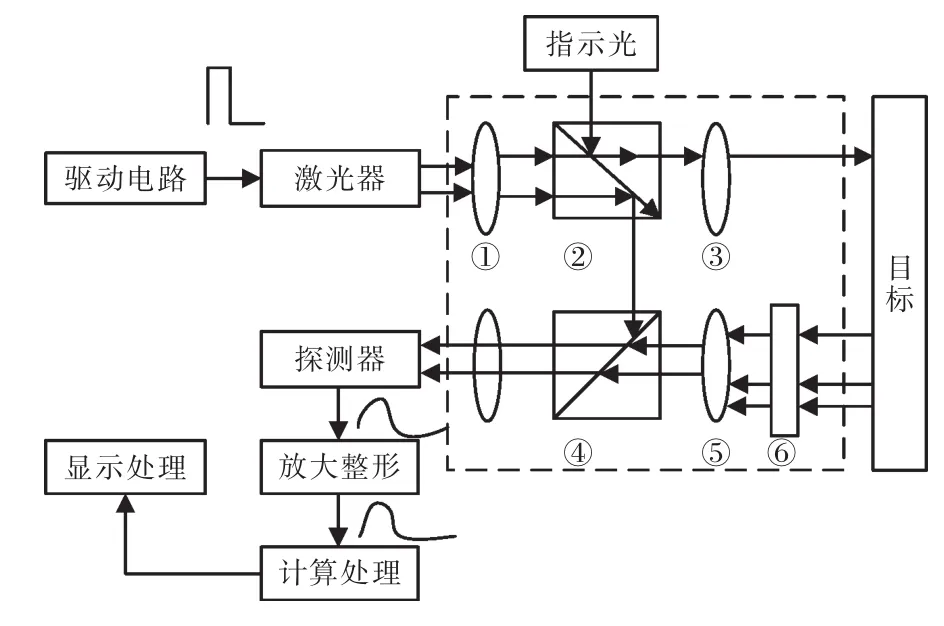
图1 脉冲法测速原理Fig.1 Principle block diagram of pulse method
虚线框内是激光发射和接收的光学系统。①③⑤为双胶合透镜,用于激光器的准直和会聚光。将激光管发射出的调制光进行准直,使发射光能集中,提高测程;将目标反射回来的光信号进行聚焦,集中光能投射至接收探测器,提高接收灵敏度,改善接收信噪比。②④为分束镜。⑥为窄带滤波片。滤光片主峰波长905 nm,半宽2 nm,主峰偏差0.5 nm。由于脉冲激光测速是在测距的基础上实现的,先介绍脉冲法测距原理。脉冲法测距是通过测量激光光束在待测距离上往返传播的时间来换算出距离的,其换算公式为
式中:S为待测距离;c为激光在大气中传播的速度;t为激光在待测距离上的往返传播时间。这里,c作为已知量,t作为待测量。
激光脉冲测距的工作过程为当系统对准目标(如汽车号码牌)后,激光器发出一个很强很窄的激光脉冲,这个光脉冲经过双胶合透镜①,压缩了它的发散角,压缩后它的光束发散角一般是几个毫弧度,使得激光器发出的脉冲光聚焦为平行光发射(即激光器的准直系统)。这样的光脉冲射到几公里远的地方,才只有几米直径的一个光斑,一般我们的实际测量距离为300 m左右,这样光斑更小。
在脉冲发射出去的同时,其中极小一部分光立即由2块分束镜②④反射到探测器,它作为发射参考信号,用来标识激光发出的时间,这是计时开始时刻t1。参考信号到达探测信号的光电转换器(雪崩管),于是光信号变成电信号,即光脉冲变成电脉冲。这个电脉冲经放大、整形滤波后送入时间测量系统,使其开始计时。而射向目标的光脉冲由于目标的漫反射作用,总有一部分光从原路反射回来,于是射向目标的光脉冲在经双胶合透镜③汇聚后射向目标点,经目标点反射回来的散射光先通过窄带滤波片⑥滤除杂波,再由双胶合透镜⑤将微弱的反射光会聚到小面积的光电探测器上,经过光电转换器变成电脉冲,再经过放大整形电路而进入时间测量系统,这是计时结束时刻t2,使其停止计时。由此便可以得到激光往返的时间。
这样可以得到第一次测量距离为

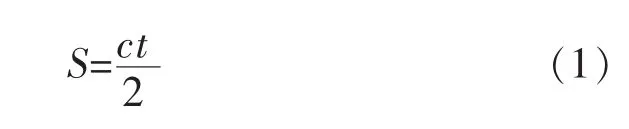
同理,对应第二次测量计时开始时刻t3,计时结束时刻t4,测量距离S2,可以计算得出这段时间内的平均速度为
因为测量时间极短,因此这个平均速度可以认为是瞬时速度。
天气是制约激光测速的重要因素,如在大雾天气使用激光测速的效果可能会很差。由于在激光脉冲传播途中存在漫反射,因此为了扩大测量范围,提高测量精度激光脉冲应该具有足够的强度。无论怎样改善光束的方向性,它总不可避免要有一定的发散,再加上空气对光线的吸收和散射,所以目标越远,反射回来的光能量就越弱,甚至根本接收不到。
为了测量较远的距离,就要使光源发射具有较高功率密度的光强。另外一个要求是激光脉冲的方向性要好。这样可以把光的能量集中在较小的发散角内,以射得更远一些,光斑更小一些,另一方面可以准确判断目标的方位。
上文2种措施可以扩大测量范围,但是要提高测量精度对激光脉冲也有要求:一是激光脉冲的单色性要好。无论是在白天还是黑夜,空气中总会存在着各种杂散光线,其往往会比反射回来的光信号强得多。光脉冲的单色性越好,窄带滤波片的效果就越佳,就越能够有效提高接收系统的信噪比,保证测量的准确性;二是激光脉冲的宽度要窄,即脉冲上升时间和持续时间要短。由于光速极快,光往返时间极短,光脉冲至少应该远远小于往返时间才能正常测量,并且减小测量误差,还可以提高系统的信噪比;三是探测器的响应速度要足够快,才能有效提取脉冲信号。
影响脉冲激光测速范围和精度的因素还有接收机带宽、计数器计数精度;天气变化;统计的脉冲误差等[4-6]。
2 系统硬件设计
本系统硬件包括发射单元、接收与数据采集电路,发射单元发送7.5 MHz的脉冲激光。接收与数据采集电路用于接收发射单元反射回来的激光。
2.1 发射单元设计
发射单元由CPLD、驱动芯片、激光器、耦合器、功率放大器组成,如图2所示。由驱动芯片驱动激光发射器发出频率为7.5 MHz的激光信号,大部分功率经过耦合、功率放大器发射出去。发射信号在遇到目标后发生反射,反射信号由激光探测器接收。

图2 激光测速系统发射单元Fig.2 Emission unit of laser velocimetry system
从JTAG口下载程序到CPLD芯片后,CPLD芯片不需要初始化,上电便开始工作,即为激光管提供驱动脉冲,同时驱动芯片也开始工作。CPLD将在上电后发出极小占空比的测速脉冲,然后将脉冲送给驱动芯片。激光管的输入端连接驱动芯片的输出端,由驱动芯片产生的大电流脉冲驱动并产生脉冲激光。激光器发射出的激光经耦合器进行耦合,在经功率放大器进行放大,使激光器发射出的激光可以达到很远的距离[5]。
2.2 接收单元与数据采集单元
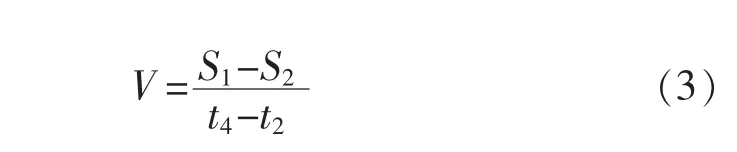
接收模块包括探测器、放大器、比较器、研华数据采集卡、工控机,如图3所示。其工作原理为激光脉冲经过反射后由光学系统进行聚焦,集中光能投射至接收探测器,接收探测器工作在高电压。接收探测器将接收到的激光脉冲进行光电转换,变成电信号进入放大器。虽然放大器对信号进行了放大,但是同时也对噪声进行了放大,也就是说并不能提高信噪比。因此我们让信号继续通过比较器,设定一定的阈值,提取出“干净”的脉冲信号,以提高测量精度。比较器把提取的干净脉冲信号传送到数据采集卡,数据采集卡是虚拟仪器的入口,它将调理后的信号以一定的采样频率采集并存储至数据采集卡。本文选用研华公司生产的PCI-1714UL高速数据采集卡,它采用12位分辨率的高速AD转换器,板载8 KB的FIFO存储区,采样频率最高可达10 MS/s。板卡通过PCI总线与工控机相连,利用工控机的内存作为采样数据的海量缓冲存储器,随后在程序的控制下完成数据的高速采集与处理。
图3 汽车激光测速系接收单元Fig.3 Receiving unit of automobile laserspeed measuring system
3 系统软件设计
虚拟仪器技术是由美国国家仪器公司(NI)在 1986年提出的一种构成仪器系统的新概念,其基本思想是用计算机资源取代传统仪器中的输入、处理和输出等部分,实现硬件核心部分的模块化和最小化;用计算机软件和仪器软面板实现仪器的测量和控制功能。与传统的测量仪器相比具有更好的灵活性和适应性,同时它们的核心功能都是一样的:采集数据、对采集的数据进行分析处理,然后显示处理结果[7]。LabVIEW是NI公司开发的虚拟仪器平台,采用工程人员熟悉的术语、图标等图形化符号来代替常规基于文字的语言程序,通过定义和连接代表各种功能模块的图标,方便迅速地创建虚拟仪器。软件的设计包括数据采集单元与数据处理单元。
3.1 数据采集单元
数据采集是虚拟仪器设计中的核心,直接影响到后面数据分析的结果,影响系统其他功能的实现。目前数据采集卡型号很多,本系统采用的是研华公司生产的PCI-1714高速数据采集卡。由于是第三方的硬件产品,在编写数据采集程序之前首先要安装研华公司为其数据采集控制卡开发的 32位LabVIEW驱动程序,该程序提供了一个调用32位DLL驱动程序的接口。编程时通过调用驱动函数就可以方便地访问底层寄存器,实现对板卡的相关操作。在用3位DLL驱动程序实现动态数据采集程序时有中断触发、DMA(直接存储器存取)触发和看门狗触发3种方法可选。本系统采用DMA触发方式,用该方式进行采集时,采样数据在没有CPU介入的情况下直接在设备和内存间传输,大大提高了数据传输速度[7]。数据采集部分的程序流程如图4所示。首先调用DeviceOpen子VI完成打开设备的操作,在本程序中打开的设备即为PCI-1714数据采集卡,该子VI加载板卡的驱动程序到内存,完成板卡的初始化,使其做好I/O的准备工作。然后选择EnableEvent子VI启动事件机制,允许设备驱动向用户发送预定的事件,再调用 MultiChannelD-MA ExSetup子VI启动总线主控DMA数据采集操作,采集到的数据会从板载FIFO存储区输出到内部缓冲区。Mult iChannelDMA ExSetup子VI运行时将自动调用AllocINT Buf子VI,用来为总线主控的DMA数据采集操作分配缓存的大小。接下来通过WaitFastA IOEvent子VI来等待预定事件的发生,当接收到AI_BufferChange事件后调用FA IT rans-fer子VI及时地把数据从内部缓存传输到用户缓存区,用于后面的数据处理显示等操作。数据采集完成或用户选择终止采集后,调用FAIS top子VI使驱动停止采集操作,随后完成释放资源 (调用FreeINT Buf子VI)以及关闭设备 (调用De-vice-Close子VI)等结束工作。
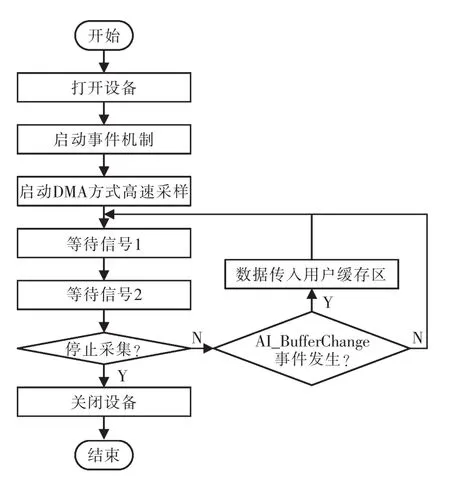
图4 信号采集流程Fig.4 Flow chart of signal acquisition
3.2 数据处理与显示
LabVIEW具有高效、强大、灵活的数据处理功能,可以解决复杂的信号分析和处理的问题[8]。在本系统中只需2次测量经反射回来的激光由激光测距方法便可求得汽车的速度。因此就要求得2次激光信号的时间间隔,使用基于N I2T IOTM技术的专用计数器定时器系列板卡进行信号时间间隔的测量时,用户可以通过调用LabVIEW函数库中的 Two-Signal Edge-Separations Measurement.vi函数,并配合其他函数编程实现测量。测量时可以使用硬件板卡上自带的高精度时钟作为计数器的时基信号,通过将图5所示的被测信号1与计数器板卡上的AUXLIN E相连,使用信号1的下降沿启动计数器的时基脉冲计数;同时将被测信号2与计数器板卡上的GATE相连,由信号2的下降沿停止计数器。并由计数器的计数值计算出信号1与信号2的时间间隔,即St=t2-t1。虽然使用专用的计数器ö定时器硬件板卡,可以方便地进行信号时间间隔的测量,但是很多板卡并不支持N I2T IO技术,如E系列的多功能数据采集卡采用DAQ2STC系统时钟控制芯片,LabVIEW并没有对应的函数完成信号时间间隔的测量,因此用户需要充分掌握硬件板卡的特点,并灵活应用LabVIEW编制相应的程序。由于无法实现对信号时间间隔的直接测量,采用将数字通道与计数器组合使用的方法实现对信号时间间隔的测量。将一路计数器与一路数字信号输入端口组合使用,由被测信号控制计数器的启动和停止,根据计数器所记录时基信号的脉冲个数,即可得到相应的时间值。测量时,用信号1的第一个下降沿(即t1时刻)控制计数器启动;用信号2的第一个下降沿(即t2时刻)控制计数器停止。处理计数器所记录的时基脉冲个数即可以求得信号1与信号2的时间间隔。在程序中用Event or Time Counter Config.vi高级函数配置计数器,使用此函数可以配置计数器的工作方式。配置好的计数器在 CounterStart.vi的作用下开始计数,并在信号 2的下降沿到来时由CounterStop.vi停止计数,计数器的计数值则由CounterRead.vi读出。将计数程序配以外围的控制线路,即可实现对信号时间间隔的准确测量。若用户需要更为精确的测量,可用两路计数器与数字口配合进行测量,另外,通过添加硬件资源,也可以测量多路信号之间的时间间隔。得到激光的不同反射信号,由本文第一部分介绍的激光测速原理,便可以很容易的求得汽车的速度。
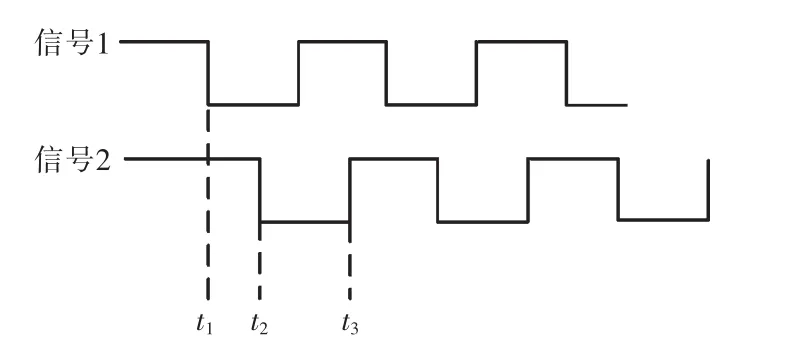
图5 信号时间间隔示意Fig.5 Time interval diagram of signal
4 结语
本文首先介绍了激光测速的原理和激光测速的2种方法,通过对比决定采用激光脉冲法实现对汽车的测速,提出了一套基于激光原理的汽车测速方法,并用LabVIEW实现对激光反射信号的采集与处理,采用虚拟仪器技术进行系统设计具有很大的灵活性和可扩展性,并且缩短了系统开发时间,在汽车测速领域对LabVIEW和虚拟仪器的使用具有很大的理论与现实意义。
[1] 沈熊,张松.激光测速数字相关信号处理器的研制[J].实验力学,1998,13(3):194-201.
[2] 刘昌文,罗诗金,刘杰,等.计数型激光测速仪信号处理器及其应用研究[J].光学精密工程,2004,12(6):581-586.
[3] 任明冰,李振华,王春勇.半导体脉冲激光测距机的硬件电路设计[D].江苏:南京理工大学,2004.
[4] 黄震,陆祖康,倪旭翔.脉冲激光测距接收电路与计时方法研究[D].浙江:浙江大学,2004.
[5] 宋敏.远程激光测距控制系统的设计与研究[D].四川:四川大学,2004.
[6] 孙晓娟.基于TMS320C240X的励磁控制器研究[J].微计算机信息,2008,24(9):25-28.
[7] TSO S K,CH EUNG S P.Fast prediction of transientstability marg in with excitation control and supple-mentary control[J]. Inter-national Journal of Powerand Energy System,2006,16(1):122-126.
猜你喜欢
中学生数理化·八年级物理人教版(2023年11期)2023-12-26 07:50:10
数学物理学报(2022年3期)2022-05-25 13:33:28
煤气与热力(2022年2期)2022-03-09 06:29:30
测控技术(2018年3期)2018-11-25 09:45:46
测控技术(2018年12期)2018-11-25 09:37:42
中成药(2017年12期)2018-01-19 02:06:54
火控雷达技术(2016年3期)2016-02-06 02:30:33
湖北师范大学学报(自然科学版)(2015年1期)2016-01-10 08:41:20
铁路通信信号工程技术(2014年5期)2014-02-28 16:57:49
河南科技(2014年10期)2014-02-27 14:09:30
