
基于模糊C均值聚类的高分辨率合成孔径雷达图像舰船目标检测❋
2018-01-18 05:49张临杰郎海涛
中国海洋大学学报(自然科学版) 2018年3期
张临杰, 张 晰, 郎海涛
(1.中国海洋大学数学科学学院,山东 青岛 266100; 2.国家海洋局第一海洋研究所,山东 青岛 266061; 3.北京化工大学应用物理系,北京 100029)
舰船是专属经济区监测的主要对象之一,发展海面舰船目标检测技术具有重要意义。由于合成孔径雷达(Synthetic Aperture Radar, SAR)具有全天候、全天时、大范围等诸多优点,在舰船检测方面已被证明是一种有效的手段,一直以来受到广泛的关注。
在使用SAR单一特征的众多检测算法中,目前最为流行的是使用滑动窗口进行检测的恒虚警率(CFAR)检测算法[1-2]。该类检测算法在进行检测时使用三个滑动窗口(目标窗口、保护窗口和背景窗口)遍历整幅SAR图像(如强度图,幅度图,或后向散射系数图),利用背景窗口中的信息对背景杂波概率分布建模,并依据所给定的虚警率阈值,判断目标窗口中的点是否为目标点。该类检测算法属于自适应门限检测,在对背景杂波的概率分布函数十分清楚时检测效果较为理想。
此外,该类算法的检测效果和计算量也与目标窗口尺寸密切相关。一般来说,目标窗口尺寸越小越能降低漏检的概率,但由于目标窗口要遍历整幅图像,因此计算量也随之大大增加。在其它参数不变的情况下,计算量与目标窗口尺寸的平方成反比。
在分辨率较低的SAR图像中,海杂波表现较为均匀容易建模,因此在低分辨率的舰船检测中,CFAR检测算法得到了广泛的利用。然而近年来由于SAR传感器技术的进步,SAR分辨率得到很大提高,已能达到亚米级。随着分辨率的提高,SAR图像尺寸增大,海杂波分布复杂建模困难,这些因素都大大影响了CFAR检测算法的检测效果。
此外在高分辨率SAR图像中,舰船目标以硬目标的形式出现,轮廓较为清晰,因此对检测算法提出了新的要求,即要求检测算法能够尽可能地保持舰船轮廓。在CFAR检测算法中,为了保持舰船轮廓,不得不减小目标窗口尺寸,而这又大大延长了检测时间(CFAR算法的计算量与目标窗口尺寸平方成反比)。
出于以上原因,发展适用于高分辨率SAR图像的舰船目标检测算法迫在眉睫。
模糊C均值(FCM)算法[3]由于具有良好的聚类性能,已被应用于图像分割领域并取得了一定的成果。如王新宁等[4]将其应用于MRI图像脑组织分割,秦昆等[5]将其应用于TM图像自动分割,朱然等[6]将其应用于道岔缺口分割,孙季丰等[7]将其与非下采样Contourlet变换(NSCT)结合,应用于城市SAR图像自动分割,邵桢等[8]结合嵌入空间信息的FCM与水平集方法,应用于SAR图像溢油检测,赵晖等[9]则将其应用于SAR图像道路检测,等等。目前尚未发现与FCM算法在SAR图像舰船目标检测中应用相关的文献。
针对以上研究背景与现状,本文尝试将FCM算法应用于高分辨率SAR图像的舰船目标检测,提出了一个新的基于FCM的舰船目标检测算法,并通过数据实验与常用的双参数CFAR算法进行了比较与分析。
1 FCM算法简介
给定样本集X={χ1,χ2,…,χn}⊂Rs,其中χk=(xk1,xk2,…,xks)T∈Rs是样本对应的特征矢量。对样本集X的聚类就是将样本集划分为C个聚类(2≤C≤n)。隶属矩阵U=[uik]c×n用来描述样本对各划分的隶属度,uik代表样本χk对聚类i的隶属程度,值越大表示样本xk隶属于聚类i的程度越高。uik满足以下条件:
∀i,kuik∈[0,1],
(1)
(2)
(3)
聚类中心pi∈Rs(i=1,…,C),P=(p1,…,pC)。目标函数
(4)

聚类准则是选取合适的聚类中心pi,(i=1,…,C)和隶属矩阵U=[uik]C×n,使得目标函数Jm(U,P)达到最小值。根据拉格朗日乘数法,Jm(U,P)达到最小时uik的解为:
(5)
若∃i,r使得dir=0,即式(5)中分母有0出现,则令uir=1,uij=0(j≠r)。
同理,根据拉格朗日乘数法,Jm(U,P)达到最小pi的解为
(6)
由此可知,对于给定样本集X,只需指定聚类划分数C,权重m,迭代终止阈值ε,以及初始聚类中心P(0),就能通过式(5)计算出隶属矩阵U(0),然后再使用U(0)和式(6)计算出新的聚类中心P(1),并使用P(1)和式(5)计算出新的隶属矩阵U(1),以此类推,直至满足迭代终止条件。也可以先给出初始隶属矩阵U(0),计算方法类似。对于由SAR图像的像素点灰度值所构成的样本集来说,初始聚类中心较初始隶属矩阵更容易先验给出,因此本文采用先验给出初始聚类中心的实现方式。根据初始聚类中心计算出的隶属矩阵则表示在选取该初始聚类中心的前提下,目标函数达到最小值时各样本对各聚类的隶属程度。计算步骤如下所示。
初始化 给定聚类划分数C和权重m,设定迭代停止阀值ε,最大迭代次数N。指定初始聚类中心P(0),设置迭代计数器b=0;
步骤1 利用式(5)和P(0)计算隶属矩阵U(0);
步骤2b=b+1,若b>N则结束;
步骤3 利用式(6)和U(b-1)计算P(b);
步骤4 利用式(5)和P(b),计算U(b);
步骤5 若满足收敛条件
则结束,否则返回步骤2;
FCM算法一次迭代的计算量为ο(nc2),即固定聚类划分数C的前提下,计算量与样本数n成正比。
算法所需设置的参数有初始聚类中心,迭代终止阈值,最大迭代次数三个。选择合适的初始聚类中心,能够避免FCM发散或陷入局部收敛。对于归一化后的SAR图像像素点灰度值所构成的样本集来说,本着尽可能分散的原则,将初始聚类中心设置为p0=[0.2,0.4,0.6,0.8],可以有效地避免发散和局部收敛。迭代中止阈值和最大迭代次数则沿用常用设置,即ε=n×10-8,N=100。
2 FCM在舰船目标检测中的应用
通过观察高分辨率海上舰船SAR灰度图(参见图2)可以发现,图像中舰船所对应的像素点灰度值最高,差距相对较小;海杂波对应像素点灰度值相对较低,灰度值差距较大,大致可分为高亮度、中等亮度和低亮度三类。针对以上特点,本文使用FCM算法中对SAR图像中各像素点灰度值进行四聚类(C=4)。归一化后的灰度值集合即为样本集X⊂R1。聚类结果按灰度值降序排序记为集合C1、C2、C3和C4。其中集合C1对应舰船目标、C2、C3和C4分别对应高、中、低亮度海杂波。取集合C1的最小值作为图像分割的阈值s,即:
s=min{C1}。
(7)
具体检测步骤如下:
步骤1 加载SAR图像,并归一化图像灰度至[0,1],像素点的灰度值构成样本集X;
步骤2 利用FCM对样本集X四聚类,得到集合C1、C2和C3;
步骤3 利用式(7)计算分割阈值s;
步骤4 利用分割阈值s,检测疑似目标并输出初步检测结果图。
该检测算法所需设置的参数与FCM算法的设置参数相同。以下为叙述方便,将该检测算法简称为FCM Based检测算法。
3 数据实验
最后通过数据实验,对本文所给FCM Based检测算法和常用的双参数CFAR检测算法进行比较。
品质因数(FOM)定义如下:
(8)
3.1 舰船检测流程
舰船检测流程见图1。本实验对双参数CFAR算法和FCM based算法使用统一的形态学方法进一步过滤检测结果。形态学方法常用指标有船面积,船间距,船宽(长)等。本实验仅使用最小船间距和船面积两个指标。具体指标见参数设置部分。

图1 舰船检测任务流程图
本实验对正确检测目标数,漏检数和虚警数,以及品质因数的统计,均建立在检测流程中的“最终检测结果”之上。另外为了能够直观地比较不同检测算法的检测效果,本文所给出的检测结果图,均为形态学筛选前的“初步检测结果”。
3.2 实验数据,平台及参数设置
使用2010年7月大连溢油星载机载实验第三次飞行所获取的一组全极化SAR图像(见图2)。图像大小5801×2667,分辨率8 m,无AIS匹配信息。经人工判读有35个感兴趣目标,在图2的VH极化图像上用“○”标出。实验在主频3.60 GHz,内存8 G的PC机上进行。
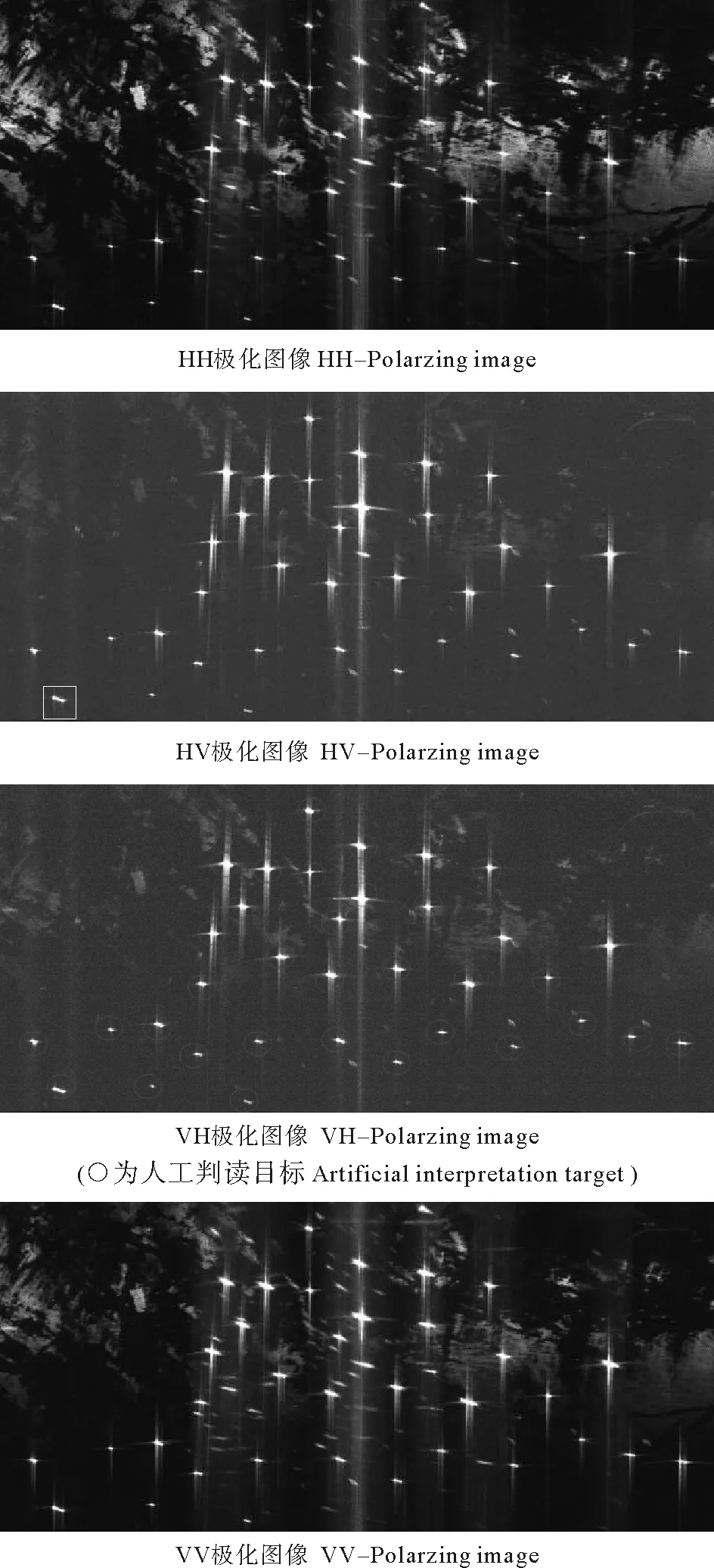
图2 全极化机载SAR图像(5 801×2 667)
本实验中双参数CFAR检测算法参数设置如下:标称化因子3,保护窗口边长100,背景边框宽度3,目标窗口边长分别取10和2两个值,以验证CFAR算法中目标窗口尺寸对计算时间和舰船轮廓保持情况的影响。最小船间距,最小船面积分别设为200个像素点和50个像素点。对距离小于最小船间距的两个潜在目标,面积较大者判定为目标。
3.3 检测结果与分析
首先我们给出双参数CFAR算法的舰船检测结果。目标窗口尺寸分别取10×10和2×2的初步检测结果图和最终检测结果统计见图3、4和表1、2。
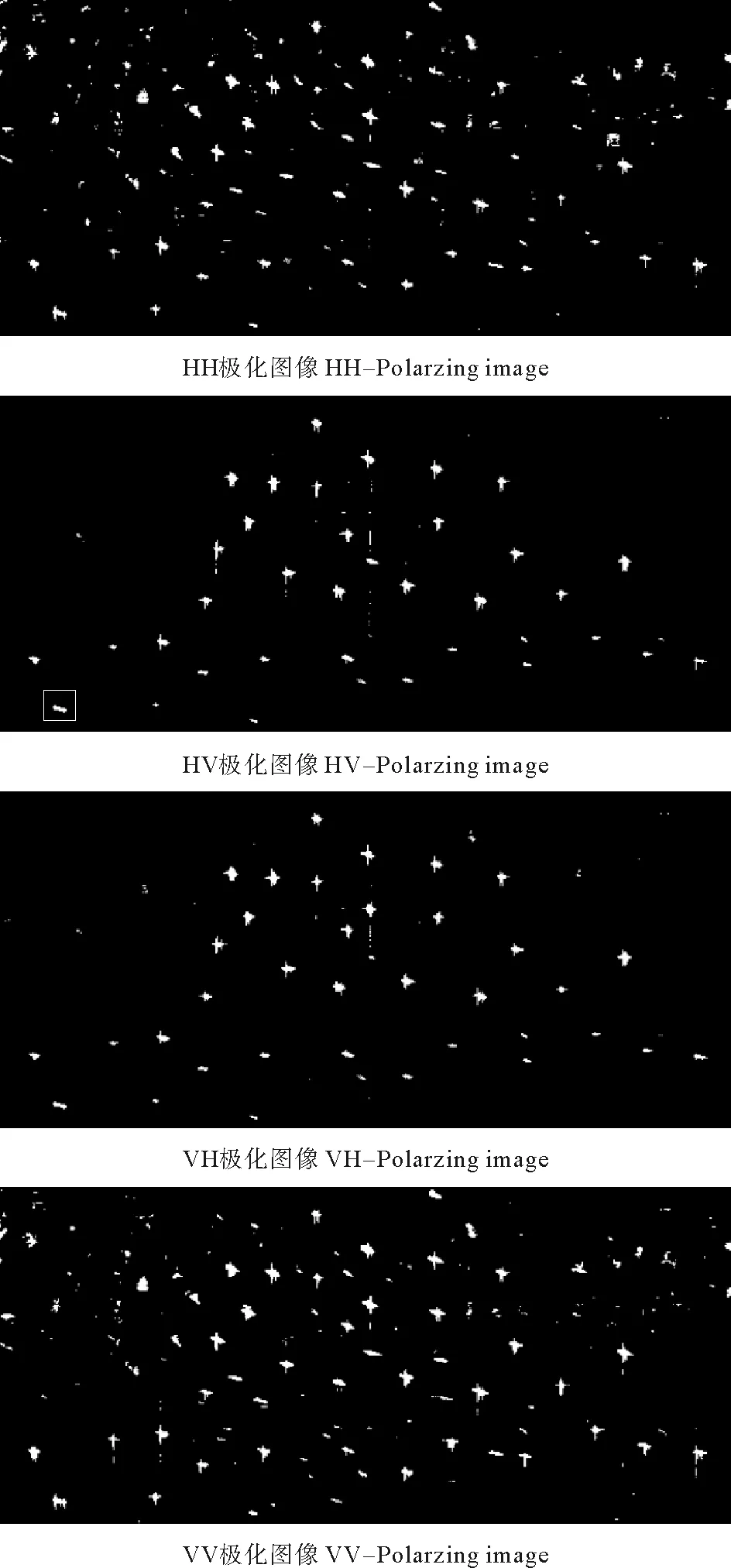
图3 双参数CFAR初步检测检测结果图
比较表1、2可以看出,减小目标窗口尺寸后,计算时间增大了约23倍,这与前面的分析一致,即双参数CFAR算法的计算量约与目标窗口尺寸的平方成反比。此外减小目标窗口尺寸后,虚警增大,这是因为许多小面积的亮点也误检测为目标。这一点可以通过比较图3和图4看出。总体来讲,双参数CFAR检测算法的检测结果并不理想,虽然没有漏检的情况,但是虚警过多,且目标窗尺寸取2×2时检测时间过长。

图4 双参数CFAR初步检测检测结果图(目标窗口尺寸:2×2)
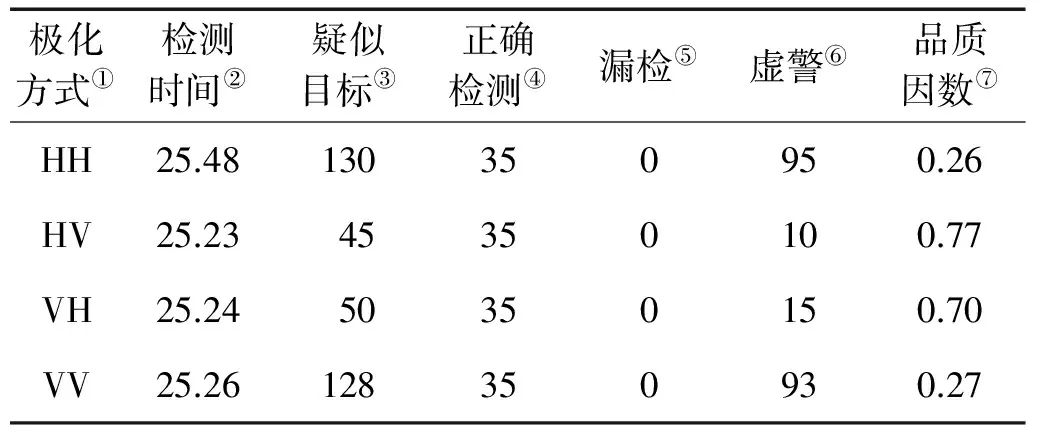
极化方式①检测时间②疑似目标③正确检测④漏检⑤虚警⑥品质因数⑦HH25.48130350950.26HV25.2345350100.77VH25.2450350150.70VV25.26128350930.27
Note:①Polarization;②Detection time;③Detectons;④Correct cletections;⑤Missed targets;⑥False alarms;⑦FOM
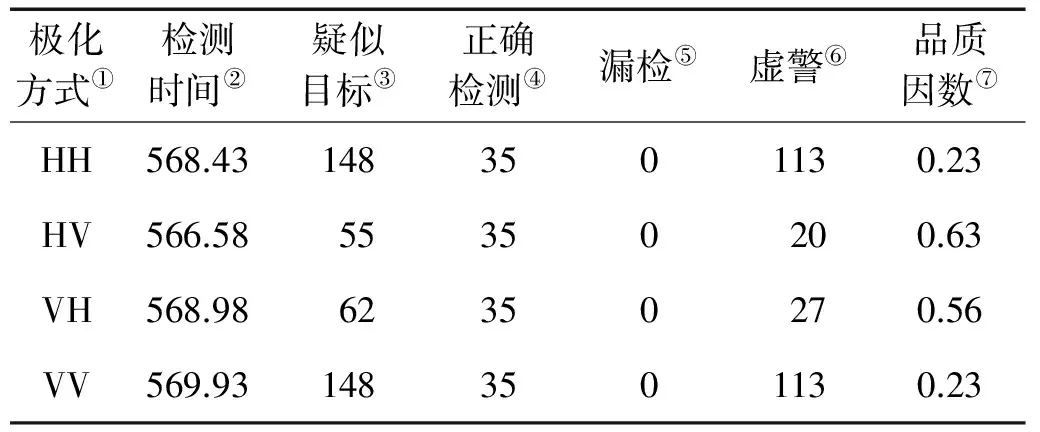
表2 双参数CFAR最终检测结果统计(目标窗口尺寸:2×2)
Note:①Polarization;②Detection time;③Detectons;④Correct cletections;⑤Missed targets;⑥False alarms;⑦FOM
下面给出FCM Based算法的初步检测结果和最终检测结果统计,见图5和表3。比较表3和表1、2可以看出,FCM Based算法的执行时间比窗口尺寸大小取10×10时的双参数CFAR算法略大,但虚警却大幅减少,从而品质因数有了很大的提高。这一点也可以从图5和图3、图4的对比中得到确认。
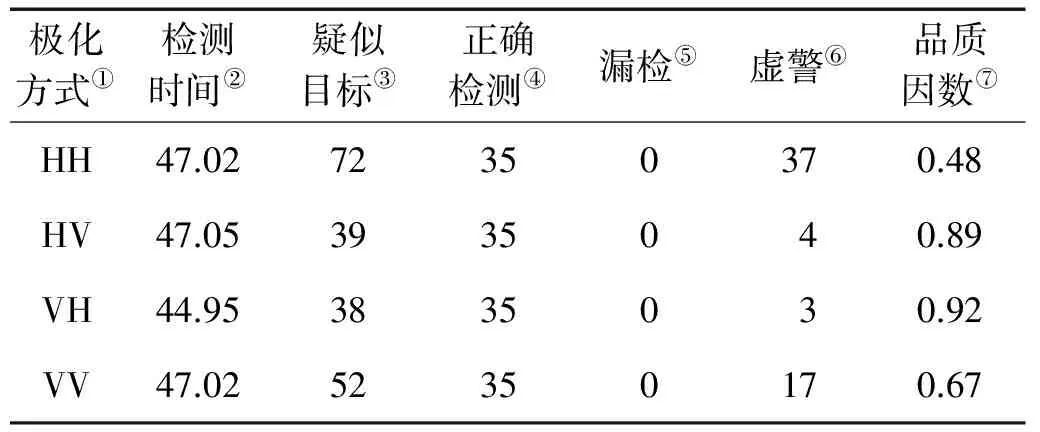
表3 FCM Based 最终检测结果统计
Note:①Polarization;②Detection time;③Detectons;④Correct cletections;⑤Missed targets;⑥False alarms;⑦FOM
为分析目标舰船轮廓保持情况,我们以HV极化图像为例,给出上面各算法初步检测结果图中“□”处的舰船目标局部放大图(见图6)。由图可以看出,与双参数CFAR算法相比,本文所给算法能够很好地保持舰船轮廓边缘。

图5 FCM Based初步检测检测结果图
4 结语
本文对使用CFAR算法进行高分辨率SAR图像舰船目标检测时出现的问题进行了分析,并利用FCM算法给出了一个新的舰船检测算法。算法所需设置的参数,即为FCM算法所需的参数,仅有初始聚类中心,迭代终止阈值,最大迭代次数三个,且易于设置。检测时间与SAR图像大小成正比。
此外,本文算法的中心思想是对SAR图像像素点灰度值聚类,根据聚类结果计算图像分割的全局阈值,并对各像素点逐一进行判断。而CFAR算法则是使用滑动窗口遍历整幅图像,以目标窗口为最小判断单元。由此可知,本文算法能够更好地保持舰船轮廓,而CFAR算法却能够适应背景杂波的局部变化。本文的贡献在于为高分辨率SAR图像舰船目标检测提供了一个新的选择。

图6 原图与检测结果局部放大图Fig.6 Local amplification of original image and detection result images
本文根据高分辨率SAR图像的特点,将聚类数设定为4;本着尽可能分散的原则,选取[0.2,0.4,0.6,0.8]为初始聚类中心;图像分割阈值取最亮点集合中的最小值。以上设置在实验中取得了较好的效果。对上述设置的进一步探讨,以及利用SAR图像灰度值以外的其他特征并与其他分类方法相结合,是下一步的主要研究方向。
[1] El-Darymli K, McGuire P, Power D, et al. Target detection in synthetic aperture radar imagery: a state-of-the-art survey[J]. Journal of Applied Remote Sensing, 2013, 7(7): 071598-071598.
[2] 种劲松, 欧阳越, 朱敏慧. 合成孔径雷达图像海洋目标检测 [M]. 北京: 海洋出版社, 2006: 47-49.
Zhong Jingsong, Ou Yangyue, Zhu Minhui. Synthetic aperture radar image ocean target detection[M]. Beijing: Ocean Press, 2006: 47-49.
[3] Bezdel J C. Pattern recognition with fuzzy objective function algorithms[M]. New York: Plenum Press, 1981: 174-191.
[4] 王新宁, 林相波, 袁珍. 基于FCM聚类算法的MRI脑组织图像分割方法比较研究[J]. 北京生物医学工程, 2015, 34(3): 221-228.
Wang Xinning, Lin Xiangbo, Yuan Zhen. A comparative study for MRI brain image segmentation based on FCM clustering algorithm[J]. Beijing Biomedical Engineering, 2015, 34(3): 221-228.
[5] 秦昆, 徐敏. 基于云模型和FCM聚类的遥感图像分割方法[J]. 地球信息科学, 2008, 10(3): 302-307.
Qin Kun, Xu Min. Remote sensing image segmentation based on cloud model and FCM[J]. Geo-Information Science, 2008, 10(3): 302-307.
[6] 朱然, 李积英. 基于改进的FCM算法图像分割研究[J]. 微电子学与计算机, 2015, 32(6): 151-158.
Zhu Ran, Li Jiying. Image segmentation research based on improved FCM algorithm[J]. Microelectronics & Computer, 2015, 32(6): 151-158.
[7] 孙季丰, 邓晓晖. 基于NSCT和FCM聚类的SAR图像分割[J]. 华南理工大学学报(自然科学版), 2011, 39(2): 60-70.
Sun Jifeng, Deng Xiaohui. Segmentation of SAR images based on NSCT and FCM clustering[J]. Journal of South China University of Technology(Natural Science Edition), 2011, 39(2): 60-70.
[8] 邵桢, 翟宏宇, 刘雪岩. 基于SFCM及水平集方法的溢油图像分割[J]. 长春理工大学学报(自然科学版), 2013, 36(3-4): 134-137.
Shao Zhen, Zhai Hongyu, Liu Xueyan. Segmentation of oil spill images based on SFCM and Level Set Methods[J]. Journal of Changchun University of Science and Technology, 2013, 36(3-4): 134-137.
[9] 赵晖, 孙进平, 王文光, 毛士艺. 基于模糊聚类的SAR图像道路检测[J]. 遥测遥控, 2009, 30(2): 34-39.
Zhao Hui, Sun Jinping, Wang Wenguang, Mao Shiyi. Road detection in SAR images based on fuzzy clustering[J]. Journal of Telemetry, Tracking, and Command, 2009, 30(2): 34-39.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
北京航空航天大学学报(2022年6期)2022-07-02
合肥工业大学学报(自然科学版)(2021年11期)2021-12-10
舰船科学技术(2021年12期)2021-03-29
天津医科大学学报(2021年1期)2021-01-26
现代电子技术(2021年1期)2021-01-17
中国信息技术教育(2020年2期)2020-02-02
微型电脑应用(2019年1期)2019-01-23
电脑知识与技术(2018年35期)2018-02-27
舰船科学技术(2016年1期)2016-02-27
