
对标世界技能大赛培养机器人高技能人才助力中国制造2025
2018-01-15 03:15邓三鹏祁宇明权利红
装备制造技术 2017年11期
邓三鹏,祁宇明,权利红
0 引言
世界技能大赛由世界技能组织举办,被誉为“技能奥林匹克”,是世界技能组织成员展示和交流职业技能的重要平台。中国在第41届首次参加收获1枚银牌,在第44届世界技能大赛上获得了15金、7银、8铜和12个优胜奖的好成绩,列金牌榜首位[1];其中移动机器人(Mobile Robotics)赛项获得铜牌,实现了该赛项奖牌零的突破。为选拔优秀技能人才,培育工匠精神,促进机器人技能人才队伍建设,推动国内技能竞赛与世界技能大赛接轨,全国机械职业教育教学指导委员会、机械工业教育发展中心等单位联合举办“2017年全国机械行业职业院校技能大赛-‘博诺杯’移动机器人竞赛”,该赛项由天津博诺智创机器人技术有限公司等单位承办,来自全国13个省市的86支代表队参与了本次大赛的角逐。
1 赛项任务
竞赛为团体赛,每组由2人组成,不仅考核参赛选手完成比赛任务的情况,而且还考验选手对于机械、电气、程序联调的综合水平,以及对编程方式、比赛策略的把握。竞赛任务如下:
(1)完成移动机器人机械部分的安装调试。保证运动部件运转灵活,无卡阻、爬行现象,在运动过程中,电线不与其它零件发生碰擦,机械零件连接紧固、正确,电气接线符合要求,装配后美观整洁,排线整齐。
(2)使用myRIO及摄像头作为硬件,实现台球的识别。掌握物体识别的方法,掌握一种适合的颜色识别算法,使用myRIO的视觉处理模块并完成硬件的连接,进行不同台球的区分。
(3)移动机器人在场地中遥控或自主寻找指定的台球并抓取。完成手动遥控器与移动机器人的通信连接,考察通过硬件设备观测地形的能力,以及机器人的路径规划策略,完成移动机器人的自主路径规划。
(4)自主搬运台球通过场地的通道,将台球放在指定图形码的存储区内,并重复动作。完成移动机器人的直线、转向以及平移运动,运用传感器融合技术,保证移动机器人运动过程中的安全无碰撞。
2 大赛平台
本次大赛的竞赛平台采用天津博诺智创机器人技术有限公司基于第44届世界技能大赛研制的BNRT-MOB-44型智能移动机器人(如图1所示)。该平台由移动平台、智能视觉系统、机械手爪、传感系统、myRIO控制单元和通信六个模块组成,其中包括摄像头、丝杠、导轨、连接架、舵机、机械手、机架、超声波传感器、麦克纳姆轮、伺服电机、滚珠滑块等机构。
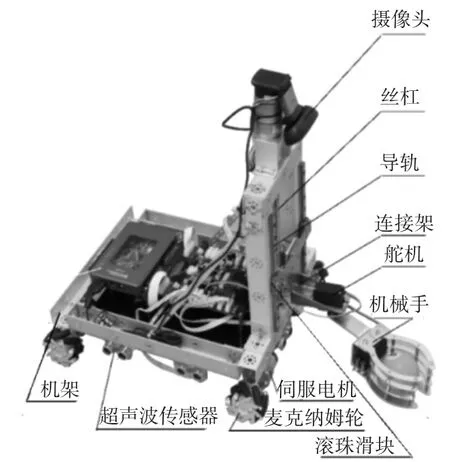
图1 BNRT-MOB-44型智能移动机器人
工作场地为2 m×4 m地面平整的空间(如图2所示);场地共分为台球放置区1,走廊2,台球散落区3、4和发球区5五个部分。

图2 移动机器人运行工作场地
主要特点如下:
(1)路径规划与自主移动技术。移动机器人需要将指定的台球抓取到其对应的图案处,完成这一任务的核心是路径规划与自主移动技术。当移动机器人处在一个简单或复杂、静态或动态、已知或未知的环境中时,机器人的首要任务是按照一定的性能指标,基于环境感知,在避开障碍物的同时,搜索到一条从初始位置开始的实现其自身目的的最优或次优路径,以最小或较小的消耗完成指定的任务。移动机器人做好路径规划后,在场地中自主移动,以找到对应的台球。
(2)图像处理以及颜色识别技术。在比赛过程中,移动机器人需要识别16种不同的物体。使用myRIO控制器的图像处理模块并配合LabVIEW的图像编程模块,区分出台球不同的颜色以及图案,并将这些数据反馈给主程序。图像处理以及颜色识别技术在实际生产中应用地越来越广泛,世界技能大赛移动机器人赛项将图像处理的难度加大,由几种颜色的区分发展到现在16种不同颜色以及图案的处理。
(3)传感器多源信息融合。移动机器人需要从起始位置出发,在不碰到走廊墙壁的前提下,沿着走廊墙壁行走,移动到达台球散落处,将台球抓取后移动至走廊入口处,在移动机器人移动的过程中,需要避免障碍物的碰撞。多传感器集成与融合技术对环境和对象的复杂性、不确定性感知性很强,其具有互补性、冗余性、低成本性及实时性等优点,利用多个不同的传感器完成信息的采集并实现信息的融合,大大提升了移动机器人的灵活性。
移动机器人采用美国NI的myRIO1900控制器为核心,使用LabVIEW作为开发工具,使得整个控制流程变得可视化图形化,例如建立如图3所示的移动机器人系统调试界面,在界面标题部分需写有“2017年“博诺杯”移动机器人大赛”,并在Labview前面板相应设置各单元调试模块。应用LabVIEW,开发速度明显提高,LabVIEW强大的工具支持内部大量的例程模块与函数包,使得不论是做控制还是做数据采集与处理分析都变得简单快捷。

(续下图)
(续上图)

图3 移动机器人系统调试界面设计
在强大的核心控制器与软件平台支持下,图像识别,定位跟踪和自主移动等机器人智能技术都可以轻松实现,移动机器人采用标准的铝型材搭建,配以精巧的机械结构,搭载四个麦克纳姆轮,与大量可选传感器配合(摄像头视觉,超声波测距,红外寻迹,灰度识别,红外测距等),使得移动机器人能够适应多种场地,完成多种综合任务。
3 培养机器人技能型人才助力产业升级
移动机器人技术代表着现代机器人发展的前沿,在工业机器人中占有重要的比重,是中国制造2025重点发展领域中的重要组成部分,也是职业院校以及高等院校的教学重要环节。近年来,国内移动机器人产业表现出爆发性增长态势,对移动机器人设计、维护、保养方面的专业技术人员的需求也不断扩大,培养精通移动机器人技术的高水平人才也成为各大院校关注的重点问题。一直以来,天津博诺智创机器人技术有限公司以协助院校进行机器人及相关建设,提升人才职业能力素养为总体目标,充分发挥机器人产业发展优势,以校企合作为支撑纽带,不断推动移动机器人技能型人才培养工作的开展。
3.1 移动机器人教材开发
基于LabVIEW2015-myRIO版编程软件和智能移动机器人(BNRT-MOB-44)开发了教材《移动机器人技术应用》,通过剖析世界技能大赛移动机器人赛项阐述了移动机器人技术,从移动机器人世赛典型机器人搭建实例及调试、LabVIEW基础、myRIO配置、myRIO应用、传感器的通信与调试、LabVIEW拓展训练、移动机器人世赛典型机器人控制等七部分来讲述,按照“项目导入、任务驱动”的理念精选教学内容,内容全面综合、深入浅出、循序渐进、实操性强,每个项目均含有典型的实施案例讲解,兼顾移动机器人应用的实际情况和发展趋势。
3.2 开展专业师资培训
近几年来,博诺机器人为国内众多职业院校骨干教师提供专业培训机会,先后开展了多期“机器人专业带头人领军能力高级研修班”、“机器人骨干师资研修班”和“移动机器人技术研修班”,培训学员达400多人。同时,博诺智创机器人技术有限公司还结合机器人竞赛、工程应用、教学、科研和技能鉴定方面的丰富经验,编撰了智能制造应用型人才培养丛书,有力支撑了机器人技能型人才培养的需求。
3.3 研发智能移动机器人助力产业升级
博诺机器人与天职师大机器人及智能装备研究所合作研发出多款工业型智能移动机器人。如图4所示为应用于工业环境物料转运的智能AGV机器人。

图4 智能AGV机器人
如图5所示为灾难环境下信息快速获取空投机器人,利用GPS、惯性导航信号、手动遥控控制信号控制翼型伞实现机器人精准定点空投,克服了复杂环境的影响,使得机器人在第一时间空投进入灾难现场。通过机器人携带的各种传感器探测现场的情况,解决灾害环境现场信息获取问题。灾难环境下信息快速获取空投机器人可应用于地震、化工企业、海上平台等突发灾害现场。

图5 灾难环境下信息快速获取空投机器人
如图6所示为储油罐油泥清理机器人,以超高压水射流为清洗源,基于现场控制装置、油气密度检测装置、信息反馈装置以及多自由度机器人构建清洁体。储油罐油泥清理机器人把作业人员位于储油罐外安全的操作环境中,将清理模式、信息反馈有机统一,使得清灌工作安全化、简单化、智能化,有效地解决了储油罐清理中的诸多问题。

图6 储油罐油泥清理机器人
如图7所示为基于超高压水射流的混凝土破拆机器人,基于超高压水射流研制的混凝土破拆机器人,水射流压力范围可达到120 MPa~400 MPa,混凝土破拆厚度大于200 mm,具备高能、冷态、点割的特点,破拆时不产生分层、无热聚集、无热影响区、无粉、烟尘污染等特点,提高了破拆质量,尤其是在易燃易爆的环境下,避免了造成二次灾害。

图7 基于超高压水射流的混凝土破拆机器人
如图8所示为基于双目云台和环境监测功能的履带机器人,该履带机器人具有双目云台控制功能,控制距离5 km;摄像头升降功能;双波段视频成像功能系统;现场环境四参数反馈功能;监测环境有毒气体;语音播报功能等功能,履带式机器人可用于机器视觉研究、更强调应用,并且配备了高精度伺服控制和红外、视觉、激光、超声等传感器,具有较高的教学和科研应用价值。

图8 基于双目云台和环境监测功能的履带机器人
4 结束语
为培养世界技能大赛移动机器人方面的人才,天津博诺智创机器人技术有限公司从设备研发、选手培训到举办“博诺杯”移动机器人大赛,投入了大量的人力物力;一方面,让移动机器人设备经受了各种考验;另一方面,通过本次比赛,推动了智能制造的技术进步,加快了博诺机器人挺进“中国制造2025”的步伐,为智能制造人才培养添翼,打造智能制造教育装备领先企业。天津博诺智创机器人技术有限公司将继续坚持“政产学研用”的产品开发路线,专注于机器人及机器人技术为核心的教育装备与自动化生产线相关产品的研发与产业化,践行中国制造2025.
[1]15金7银8铜!世界技能大赛中国代表团创历史最佳[EB/OL].[2017-10-20].http://huaren.haiwainet.cn/n/2017/1020/c232657-31154550.html.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
现代仪器与医疗(2021年1期)2021-06-09
中国惯性技术学报(2019年3期)2019-10-15
中国惯性技术学报(2019年3期)2019-10-15
农村青少年科学探究(2019年10期)2019-03-24
体育科技(2016年2期)2016-02-28
Coco薇(2015年3期)2015-12-24
中国自行车·骑行风尚(2014年4期)2014-10-10
小说月刊(2014年9期)2014-04-20
对联(2011年14期)2011-09-18
