目标屏蔽带自适应调整的CFAR处理器
2018-01-15 19:47
雷达科学与技术 2017年5期
(大连海事大学,辽宁大连116026)
0 引言
单元平均恒虚警(CA-CFAR)和双参数恒虚警(BP-CFAR)检测方法在均匀杂波环境中通常能得到较好的检测性能[1]。但是,在复杂环境中,当检测目标的参考窗内出现1个或多个干扰(例如目标),检测性能将随着干扰强度和干扰数量的增加而下降[2]。为此,相继提出了各种各样的解决方法。
文献[3]利用核密度(非参数估计)法对参考单元数据进行估计处理,为杂波特性不确知下的恒虚警处理提供了一种有效的方法,检测性能相对已有的单样本非参量CFAR处理器有了大幅提升,但对于参考单元中因目标而导致的对杂波统计特性的干扰问题,需要另辟蹊径。
文献[4]针对于强杂波背景下的小目标检测,同时利用常规CA-CFAR与自适应匹配滤波,但需利用回波信号的幅度和相位信息,不适用于难以获取回波相位的非相参航海雷达。
文献[5]提出了ATM-CFAR方法,利用有序数据变率(ODV)统计量自动选择参数进行杂波估计,使削减平均恒虚警(TM-CFAR)处理具有自适应性,在多目标背景下取得较好的检测性能,但该方法需要对杂波分布判决门限进行合理选择,否则会影响杂波环境的正确判决概率,并且在大目标占据参考单元数较多的情况下,仍会导致大目标邻近的小目标无法有效检测。
文献[6]的自适应单元平均(ACA-CFAR)方法将参考单元分成q个长度为M的子窗,基于全程杂波均值与子窗均值的比较,删除存在干扰目标的子窗,但因假设杂波是均匀的,对于常常工作在非均匀海杂波下的航海雷达,还需具备建立自适应保护带的能力。
文献[7]针对目标的遮蔽现象,利用地理信息系统(GIS)的先验信息对参考单元进行筛选,尽可能多地选择与待测单元地貌相同的训练样本,构建知识辅助的CA-CFAR器。
利用所获得的先验知识,对非均匀杂波的统计特性进行测试,可有效提高非均匀杂波环境下的目标的检测性能,降低非均匀杂波环境下采用非均匀训练采样点可能带来的不利影响[8]。
显然,有效利用各种信源手段获取知识是实现自适应CFAR的有效方法。本文的目标屏蔽带自适应调整的CFAR(AW-CFAR)方法,针对航海雷达常遇到的目标密集分布的情况,利用船舶自动识别系统(Automatic Identification System,AIS)的目标感知信息,在CA-CFAR中加入自适应调整的目标屏蔽带,以消除目标进入参考窗口对均值统计量估计的影响,从而有效解决常规CFAR处理因目标进入参考窗口而导致的干扰和检测性能损失的问题。
1 基于AIS信息的AW-CFAR算法
1.1 自适应的目标屏蔽带宽度
本文考虑在更好地保护目标检测性能的同时,还应保障对临近大目标的小目标的可靠检测。为此,CFAR的保护带在保护被检测目标自身的同时,必须避免大目标对临近小目标检测的不利影响,因而需要建立目标屏蔽带。屏蔽带宽度W是一个对检测性能具有重要影响的参数,仿真结果如图1所示。
图1(a)是瑞利杂波下的雷达回波信号波形,AIS目标纵向宽度为40个距离量化单元;图1(b)为常规无保护带的CA-CFAR的均值估计值,图1(c)~图1(e)分别为W等于、小于和大于目标尺寸的三种情况下的均值估计值。可见,当W与目标尺寸匹配和大于目标尺寸时,均可有效避免目标进入参考单元对均值估计造成的不利影响。W过小,难以避免干扰目标的影响;W过大,会造成检测单元与参考单元偏离过大,受杂波非平稳特性的影响加大。为此,为了避免因W与目标尺寸不匹配而导致的恒虚警处理效果变差,并考虑对临近大目标的小目标的可靠检测,需要建立屏蔽带宽度W随目标尺寸自适应调整的AW-CFAR处理器。
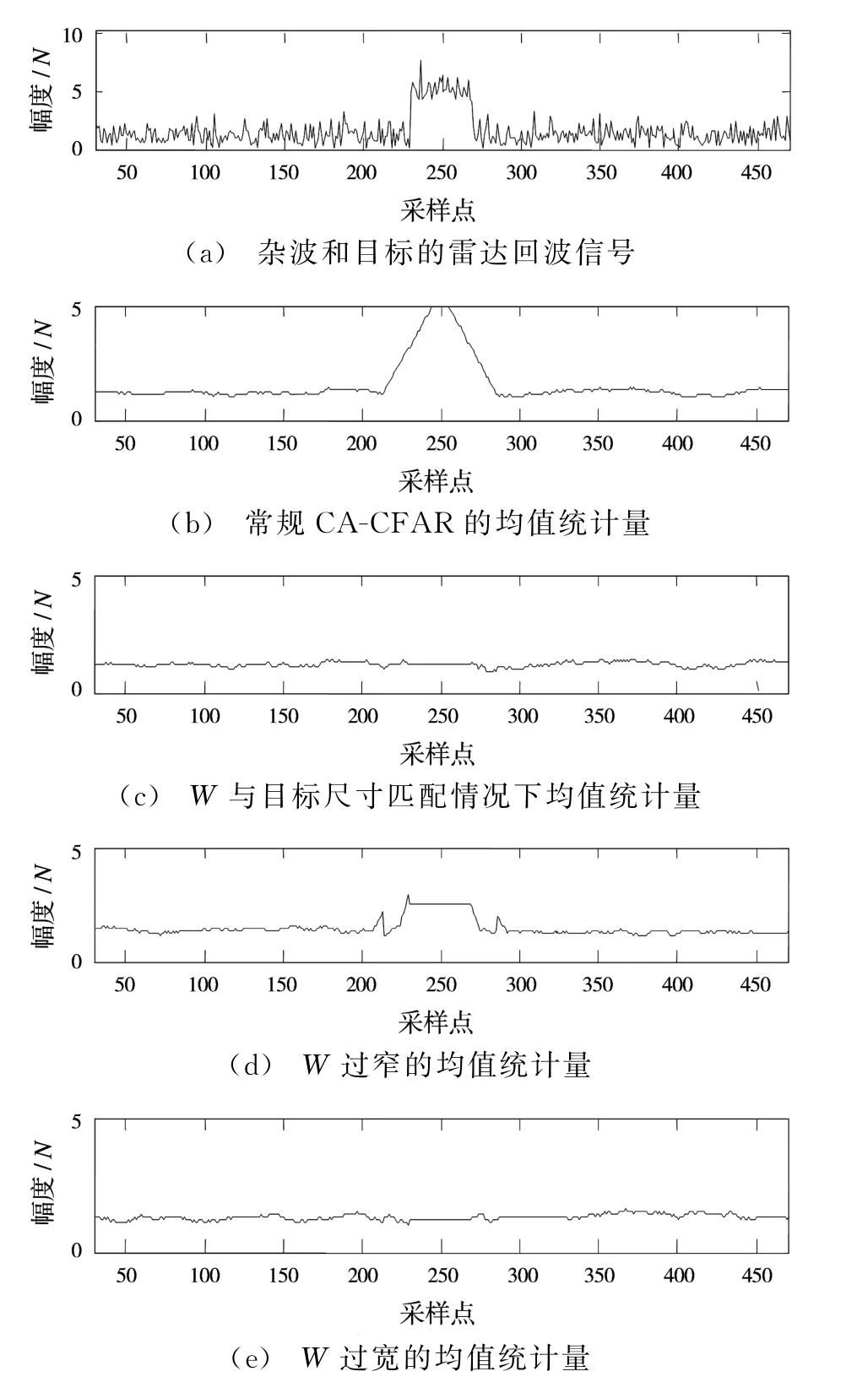
图1 不同W下均值统计量的估计结果
目前绝大多数机动船舶都装设有AIS设备,利用AIS的目标信息实现目标干扰环境的感知,进而建立自适应目标屏蔽带,以消除这些目标对邻近目标(特别是小目标)检测性能的影响。
图2为来自AIS的目标尺寸信息,目标的长宽尺寸分别为A+B和C+D。图3为目标尺寸与屏蔽带宽度W的关系。
设由AIS获得的目标的航向为γ,目标的方位为α,目标的距离为r,当前的雷达方位为θ,ξ为以弧度为量纲的雷达天线水平波束宽度,ϕ=|α-γ|。

图2 AIS6的船舶尺寸信息
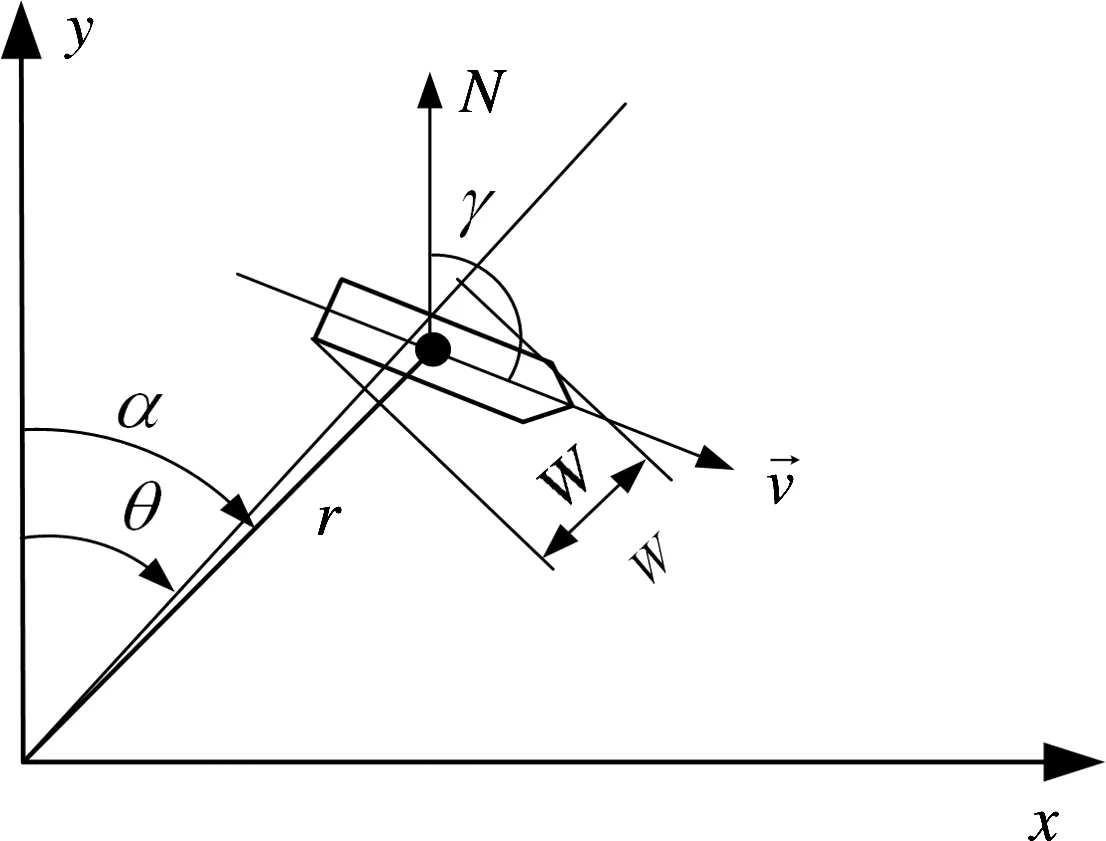
图3 AIS船舶尺寸在径向方向的投影关系
将距离和方位离散化后,各变量用量化单元个数表示,可得如下的AIS目标的径向尺寸的计算公式:

式中:NA,NB,NC和ND分别表示A,B,C和D的距离量化单元数;Ro表示距离量化单元;θo表示方位量化单元;Nr和Nθ分别表示用距离量化单元数和方位量化单元数表示的目标的距离和方位;τ表示发射脉冲宽度,c表示光速。则随目标径向尺寸自适应调整的屏蔽带宽度为

式中,INT(·)表示取整。在不同方位上,屏蔽带对该目标的保护作用一直持续到目标脱离雷达水平波束。
根据雷达目标的距离不同,目标所占据的方位量化单元数不同,对于尺寸小于和大于雷达水平波束横向尺寸ΔL的远、近距离目标,目标尺寸对CFAR处理影响的方位范围不同,ΔL为

显然,应分如下两种情况考虑目标尺寸对CFAR处理的影响。
1)ΔL>A+B
此情况下,目标对CFAR影响的方位范围为水平波束宽度的方位范围,F(Nθ)按式(2)计算。
2)ΔL<A+B
此情况下,目标对CFAR影响的方位范围大于雷达水平波束宽度的方位范围,F(Nθ)按照下式计算:

在不能有效获取AIS目标尺寸参数的情况下,根据图2(b)和图2(d),可通过分析均值估计值的变化情况,对屏蔽带进行调整。当均值估计值明显增大时,应调大屏蔽带,直到均值维持相对平稳。
1.2 自适应目标屏蔽带恒虚警算法(AW-CFAR)
设共有P个AIS目标,第i个AIS信息用向量DAi表示为DAi=[Nai,Nri,Nγi,NAi,NBi,NCi,NDi]T,i=1,2,…,P,式中各元素的意义同式(1)~式(3)。
又设当前检测单元为(Nθ,Nr),AW-CFAR的结构模型如图4所示。图中,CW为屏蔽带控制参数,如式(7)所示:

第一检测门限处理器完成CA-CFAR或BP-CFAR(双参数恒虚警处理器)处理。第i个检测单元的第一检测门限处理器输出yi为

式中,xi为检测单元的输入信号,为杂波的均值估计值,为杂波的方差估计值。分别按下式计算:


式中:NmWL和NmWR分别为屏蔽带的左单元和右单元;NR为检测单元;N为左右参考窗口长度;EL和ER分别为左、右参考窗口求得的均值;DL和DR分别为左、右窗口求得的方差。
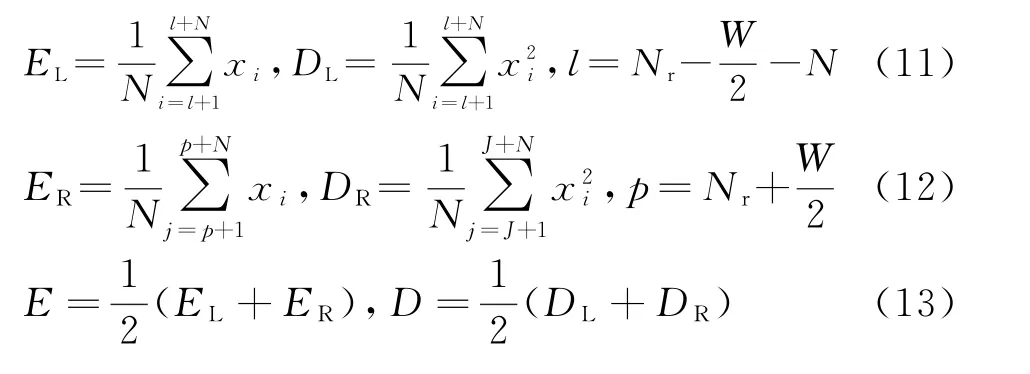
图4 AW-CFAR处理器的结构模型
1.3 AW-CFAR算法的处理流程
由式(4)可见,目标屏蔽带宽度将随目标方位的变化而改变,这一改变由式(2)控制。本算法检测单元是从第Nmin个距离量化单元开始,逐个量化单元进行检测,直到最大的距离量化单元Nmax。当遇到大目标后,停止前移,直到检测单元离开目标屏蔽带为止。此后,目标屏蔽带撤销,CFAR恢复为式(12)的右窗口CFAR(RW-CFAR)处理模式,当检测单元距离检测目标间距为Nr+N时,恢复为式(13)常规的CFAR处理模式,NSM为被屏蔽目标的最大距离单元。
按照上述算法,瑞利杂波的AW-CFAR处理器的计算流程如图5所示。同理,将图5中的CA-CFAR换成BP-CFAR,即得到韦布尔杂波的AW-CFAR处理器的计算流程。图中,Wm为θm方位的屏蔽带宽度,Mθ为用量化单元数表示的被屏蔽目标的方位最大尺寸,NθM为用量化单元数表示的雷达监测的最大方位单元。
图5 瑞利杂波的AW-CFAR处理流程
2 仿真分析
设在瑞利杂波背景下,一个大目标的方位为50°,距离为5 n mile,航向为80°,AIS提供的目标尺寸A为70 m,B为50 m,C为20 m,D为8 m,雷达的发射脉冲宽度τ=0.2μs,雷达的距离量化单元为3.25 m,则根据式(1)~式(4),得屏蔽宽度W为41个距离量化单元。图6和图7为当小目标纵向尺寸为6个量化单元时,与大目标间的间距由小变大时,利用图5所示流程,分别对瑞利杂波环境和韦布尔杂波环境下的上述目标进行10 000次实验所得到的小目标检测处理结果(左右参考单元宽度分别为16,大目标信杂比为30 d B,图中位置为250)。

图6 瑞利杂波背景下与大目标不同距离的小目标AW-CFAR和CA-CFAR检测处理结果比较

图7 韦布尔杂波背景下与大目标不同距离的小目标AW-CFAR和BP-CFAR检测处理结果比较
图6为在瑞利杂波环境下,采用屏蔽带自适应调整的AW-CFAR处理算法的小目标检测处理结果和无屏蔽带的常规CA-CFAR处理器的小目标检测处理结果的对比图;图7为在韦布尔杂波环境下,采用针对韦布尔分布特性的双AW-CFAR处理算法的小目标检测处理结果和无屏蔽带的常规BP-CFAR处理器的小目标检测处理结果的对比图。
由图6和图7可见,对大目标附近的小目标采用本文所给出的处理方法(AW-CFAR),相比于传统的CA-CFAR和BP-CFAR方法,在同样的发现概率条件下,对大目标附近的小目标的检测能力得到极大改善,在目标间距为30个距离量化单元时,瑞利杂波背景下AW-CFAR信杂比改善8~13 dB;韦布尔杂波背景下,AW-CFAR信杂比改善20 dB。可见,韦布尔杂波背景下,AW-CFAR方法更能克服BP-CFAR对目标进入参考单元过于敏感的问题,获得更好的大目标附近的小目标的检测效果。此外,由实验结果可见,当小目标与大目标的距离增大时,两种处理方法均显示出这种优势会变小;当小目标远离大目标时,本文所提出的方法对小目标的检测能力与传统的CA-CFAR和BP-CFAR方法相同。
3 结束语
本文利用由AIS获得的目标位置和尺寸信息,建立目标屏蔽带,并自适应调整屏蔽带宽度。实验结果表明,该处理方法既有效地保护了大目标的检测性能,同时也有效地提高了大目标附近小目标的检测能力。此外,该方法可应用于所有基于检测单元和参考窗口结构的统计量估计CFAR处理器。
[1]何友,关键,彭应宁,等.雷达自动检测与恒虚警处理[M].北京:清华大学出版社,1999:32-38.
[2]GANDHI P P,KASSAM S A.Analysis of CFAR Processors in Nonhomogenous Background[J].IEEE Trans on Aerospace and Electronic Systems,1988,24(4):427-445.
[3]郝凯利,易伟,董天发,等.未知杂波背景下恒虚警检测门限获取方法[J].雷达科学与技术,2015,13(2):183-189.HAO Kaili,YI We,DONG Tianfa,et al.CFAR Detection Based on Kernel Density Estimation Under Background Unknown[J].Radar Science and Technology,2015,13(2):183-189.(in Chinese)
[4]曾浩,李洁,鉴福升.强海杂波环境下目标检测方法对比分析[J].雷达科学与技术,2015,13(1):33-36.ZENG Hao,LI Jie,JIAN Fusheng.Comparative Analysis of Target Detection Methods in Strong Sea Clutter Background[J].Radar Science and Technology,2015,13(1):33-36.(in Chinese)
[5]杜海明,马洪,杜保强.基于统计量ODV的自适应TM-CFAR检测[J].北京邮电大学学报,2013,36(2):64-69.
[6]张中仅,于雪莲,钟琦.一种自适应CFAR方法在机场跑道FOD检测中的应用[J].无线电工程,2014,44(2):60-62.
[7]李青华,姚云萍.一种基于知识辅助的CFAR检测器[J].雷达科学与技术,2012,10(1):88-93.LI Qinghua,YAO Yunping.A Knowledge-Aided CFAR Detector[J].Radar Science and Technology,2012,10(1):88-93.(in Chinese)
[8]WANG Yikai,XIA Wei,HE Zishu.CFAR Knowledge-Aided Radar Detection with Heterogeneous Samples[J].IEEE Signal Processing Letters,2017,24(5):693-697.
猜你喜欢
好日子(2022年3期)2022-06-01
科学与信息化(2021年30期)2021-12-24
幼儿园(2021年12期)2021-11-06
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
雷达与对抗(2020年1期)2020-06-05
意林·少年版(2020年23期)2020-01-15
中老年健康(2017年8期)2017-12-16
妇女(2017年1期)2017-01-17
小学生时代·大嘴英语(2015年7期)2015-11-23