预警机反隐身优化组网模型研究
2018-01-15 19:47
雷达科学与技术 2017年5期
(空军西安飞行学院,陕西西安710300)
0 引言
具有隐身特性的四代机已成为世界军事发展的主流趋势。而现役各型预警机在探测具有低雷达散射截面积(RCS)的四代机时,其探测距离大大降低。以E-3预警机为例,它对于RCS大于5 m2目标的探测距离约为400 km,若目标以音速飞行(约1 200 km/h),所能提供的预警时间超过20 min。而对于RCS小于0.01 m2的隐身飞机,探测距离只有约80 km。而四代机的巡航速度可达1.5倍音速(约1 800 km/h)以上,预警机只能提供不到3 min的预警时间。可见四代机将大大降低预警机的探测威力。提升预警机的反隐身能力成为各国预警机作战研究的热点问题之一。
提升预警机对隐身四代机的探测能力,最直接的办法是增大预警雷达的作用距离或改变雷达的工作频段(从微波波段降低到米波波段)。但由于技术原因难以很快应用于现役预警机。在不改动预警机本身设计的前提下,采用预警机组网的方法可有效探测四代机的来袭。如果采用不同型号的预警机组网,由于雷达功率、天线面积或频段不同,部分雷达可能能够较早发现隐身目标。另外,如果多部预警雷达分别位于不同空域,能够探测到来袭目标的不同侧面,而通常其不同部位对雷达波的反射能力是不同的。例如F-22的RCS为0.01 m2,指的是飞机的鼻锥方向,即雷达波垂直于机头方向入射时;如果雷达波照射在飞机侧面或尾后方向,RCS会增大几十倍甚至上百倍;当目标的RCS达到0.5 m2,探测距离就能够增加2.66倍。以E-3预警机为例,当一架敌方隐身战机以垂直方向接近某架预警机,则该预警机仅能探测到其鼻锥方向雷达回波,探测距离约80 km;如果采用组网的方式,将会有一架或几架预警机位于该预警机侧方,可以探测到来袭隐身战机侧面的雷达回波;当RCS为0.5 m2时,探测距离可达200 km以上[1]。当组网中任一架预警机发现目标,即可通过数据链迅速告知地面指挥所和其他预警机,赢得宝贵预警时间[2]。
1 预警机协同探测组网方式分析
1.1 预警机执行“点状”地域的防空预警任务
当警戒空域范围小于一架预警机的强效区范围,例如某重要政治或军事目标,则可将其视为“点状”地域的防空。此种情况下,虽然一架预警机即可将警戒空域完全覆盖,不存在短时空域覆盖盲区,但存在低速盲区,对于径向速度较低的目标可能出现漏警情况。因此较为理想的条件是两架预警机在空中同时执行任务,并且飞行航线采用“十字形”,即两架预警机的航线相互垂直,如图1所示,可以较好地避免空中目标同时落入两部机载预警雷达的速度盲区,特别是避免落入雷达主杂波对应的低速盲区[3]。

图1 两架预警机“十字形”航线示意图
1.2 预警机执行“线状”地区的预警探测任务
对于边境地区或海上地理环境,通常需要警戒的区域较为广阔,必须有多架预警机同时升空执行任务,才能构成较为严密的空中警戒网络。如果采用相同型号、全向覆盖的预警机,则可以有两种基本组合航线,如图2所示,分别称为“并立”方式和“串接”方式。“并立”指多架预警机各自在任务区域独立构成航线,即以各自的短航线飞行,完成预警探测任务协同;“串接”指多架预警机沿共同的航线飞行,完成与“并立”方式大小相当区域的预警任务。
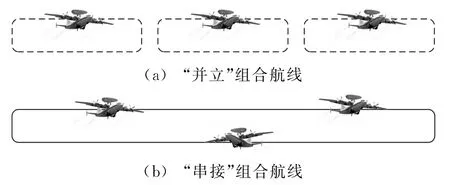
图2 3架预警机组合航线示意图
1)“并立”型组合航线
“并立”型航线使用方便,各架预警机之间协同容易。为进一步减少雷达覆盖盲区,还可以优化载机航线和航向,改善雷达探测效果。下面以雷达全方位覆盖的两架预警机的航线设计为例,来说明预警机执行典型任务时的编队方式。对具有边境地区狭长特点的地域实现多架预警机联合预警,其相邻预警机的航线若大致相同,可以优化的主要参数只有载机的飞行方向,若两架飞机同步飞行,则它们的运动轨迹大致上可以分为同向和反向两种,如图3所示。
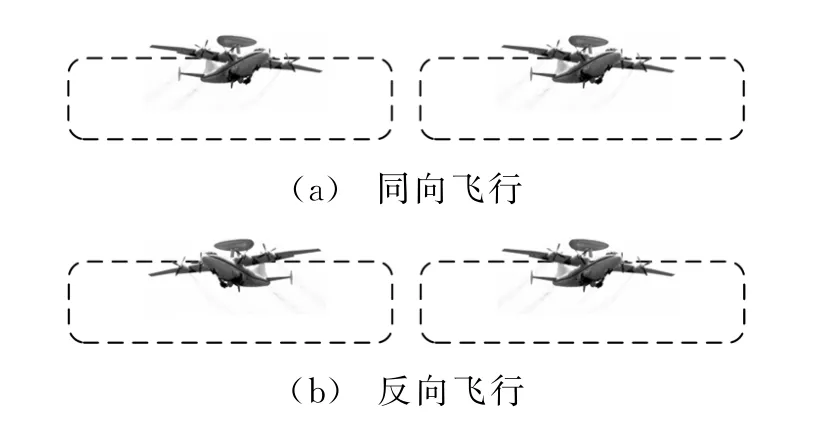
图3 相邻两架预警机航线示意图
2)“串接”型组合航线
从“串接”方式典型时刻的威力覆盖分析可见,某些时刻,组合后的航线并不能保证所有线状区域均能够被有效覆盖,例如图4中3架预警机在该时刻的空域覆盖只相当于两架的能力。另外,“串接”方式下载机必须统一沿顺时针或逆时针方向间隔飞行,无法灵活地调整航向和航速,因此在实际中较少使用。但对于载机首尾有盲区的机载预警雷达而言,有时是一种较为理想的组合航线方式。此外,对于预警机的无源探测而言,使用“串接”航线较使用“并立”航线具有更长的探测基线,因而可以获得更好的方位测角精度,对提高辐射源定位精度有帮助。
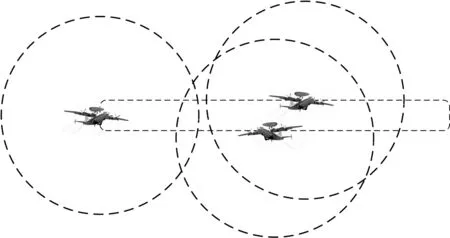
图4 预警机“串接”航线空域覆盖示意图
2 预警机优化组网模型
2.1 预警机最优化部署模型
预警机在遂行防空预警任务时,通常在敌防空火力圈之外,敌我战线的我方一侧巡逻飞行,飞行的航线通常采用双平行线航线,但有时(如侧风很大时)亦采用横8字形,特殊情况下还可采取环绕保卫重点的飞行巡逻方式,以便全方位环视警戒[4]。
本文以双平行线形航线为例进行建模。一个双平行线形航线可由4个要素唯一确定:中心点位置OL、航线长边方向角θL、长边长度L和转弯半径r,如图5所示。
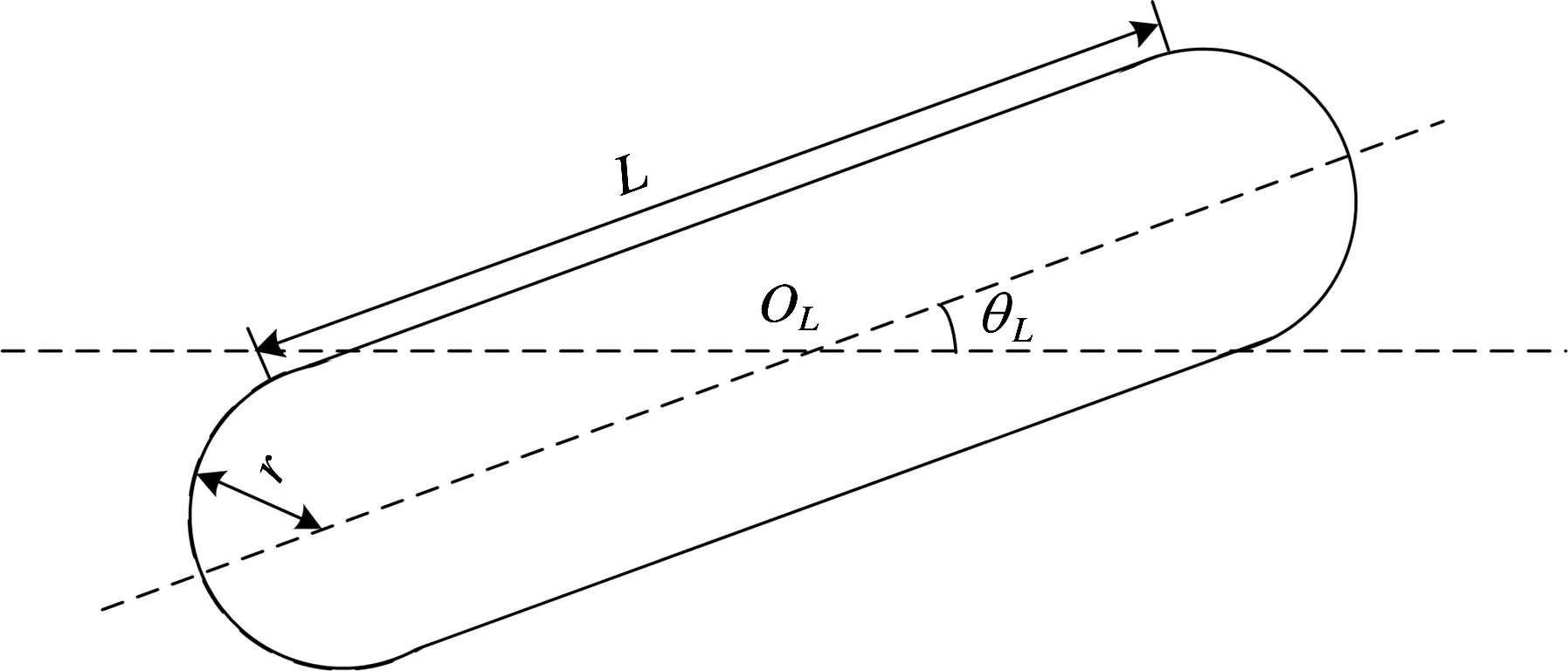
图5 预警机双平行线形航迹
一般情况下,将预警机所要防御的区域按重要程度分为警戒区域AW和重点区域AI,其中AW⊃AI,AW指至少被一架预警机探测的区域,AI指至少被一架预警机强效区覆盖的区域[5]。在预警机资源有限的条件下,应该充分利用有限的预警机资源合理协同,使得对警戒区域和重点区域的探测面积均最大。但一般情况下,这两个问题是相互矛盾的。因此,需要一种折中的办法处理。本文采用加权的方法对该问题建立数学模型的优化函数:

多预警机组网的优化部署是指根据一定的评估模型,在一定区域内选择各预警机巡逻航线的要素OL,θL,L和r,寻找f的最小值即预警机组网部署的最优位置。若对每个参数的可能取值进行遍历,则花费时间较长。因此需要对多预警机组网的部署建立评估模型并设计搜索算法获得最优解。
2.2 基于粒子群的预警机最优化组网部署
粒子群优化算法(Particle Swarm Optimization,PSO)是基于群体智能的一种新型进化计算方法,已被证明是一种有效的全局优化方法。其算法描述如下:一个有m个粒子组成的群体在D维搜索空间中以一定的速度飞行,假设:xi=(xi1,xi2,xi3,…,xid)为粒子i的当前位置;vi=(vi1,vi2,vi3,…,vid)为粒子i的当前飞行速度;pi=(pi1,pi2,pi3,…,pid)为粒子i所经历的最好位置,也就是粒子i所经历的具有最好适应度值的位置,称为个体最好位置。设群体中的粒子数为s,群体中所有粒子所经历过的最好位置为pg(t),称为全局最好位置,则pg∈ {p0,p1,…,ps},且f(pg)=min{f(p0),f(p1),…,f(ps)}。
有了以上定义,基本粒子群算法的进化方程可描述为
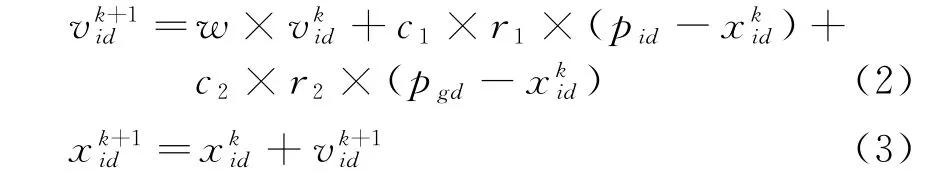
式中:下标d表示粒子的第d维,i表示第i个粒子;上标k表示第k次迭代;w表示惯性权重;c1,c2表示加速常数;r1,r2表示分布在区间(0,1)的随机数。
本文基于粒子群算法的预警机组网优化步骤描述如下:
1)将组网中n架预警机的中心点位置OL的两维坐标共同看作一个2n维的粒子,初始化粒子种群m和该粒子的初始位置和初始速度;
2)利用式(1)计算每个粒子的适应值;
3)对每个粒子,将其适应值与其经历过的最好位置pi作比较,如果较好则其作为当前的最好位置pg;
4)对每个粒子,将其适应值与全局所经历的最好位置pg作比较,如果较好,则重新设置pg的索引号;
5)根据式(2)、式(3),更新粒子的速度和位置;
6)如式(1)结果为1或迭代完成,则算法结束,否则转入第2)步。
3 仿真分析
在东海方向联合作战中,要求预警机能基本覆盖东海防空识别区的全部范围,尽远发现低空、超低空来袭目标及隐身目标,为地面指挥所提供预警情报;重点监控某岛礁、某油气田,保持其一直处于预警机探测范围内。将问题抽象化,设置一个1 000 km×650 km的长方形警戒区域,覆盖东海防空识别区全部范围,以及一个190 km×190 km正方形重点区域,包含某岛礁、某油气田。
本文采用粒子群优化算法求解问题最优解。经大概估算,两架预警机即可基本覆盖警戒区域。在设置巡逻空域时,应将巡逻航线垂直于敌机主要来袭方向。因此,双平行线航线长边应与警戒区域的长边平行。以我国某型预警机性能为参考,将具体参数为:最大探测距离Rm=420 km、巡逻航线长边长度L=60 km、转弯半径r=20 km、加权系数ω=0.2。利用粒子群算法对上述问题进行求解,仿真结果如图6所示。

图6 两架预警机协同探测仿真结果
图6中,(-500,-325),(-500,325),(500,-325),(500,325)四点构成的长方形区域为警戒区域;(210,75),(210,265),(400,75),(400,265)四点构成的正方形区域为重点区域。两架预警机巡逻航线中心坐标分别为(340,-97)和(-189,52),中心白色区域为预警机强效区,黑点区域为弱效区。仿真计算得到,优化函数f=1.000 04,已非常接近最小值1。仿真结果表明,两架预警机可覆盖东海防空识别区99%以上的面积,钓鱼岛、油气田等重点区域位于强效区,可进行不间断监控,满足预警探测要求,证明了本文所建模型比较理想。
4 结束语
预警机组网协同预警探测可提高隐身目标的探测距离,增加预警时间。本文研究了预警机协同担负预警探测任务时的组网方法,建立了预警机组网的优化部署模型,采用粒子群优化算法求解组网中各预警机的最优航线。最后仿真了两架预警机对东海防空识别区进行防空警戒的情况,通过优化航线实现了对警戒区域的全覆盖。仿真结果说明该模型有效,具有一定的实用价值。
[1]谷雨,张辰璐,李汉文,等.融合PSO和Powell的雷达组网反隐身部署优化算法[J].数据采集与处理,2016,31(3):525-531.
[2]罗继勋,雷洪利,胡朝晖,等.预警机指挥控制飞机及编队作战原理[M].北京:解放军出版社,2009:24-28.
[3]刘波,沈齐,李文清.空基预警探测系统[M].北京:国防工业出版社,2012:223-232.
[4]李广强,鲁瑞达,王茂华.预警机协同预警作战模型研究[J].舰船电子对抗,2014,37(3):83-84.
[5]王国师,李强,代科学,等.基于防空警戒任务的多预警机协同补盲[J].系统工程与电子技术,2012,34(5):941-945.
猜你喜欢
军事文摘(2022年17期)2022-09-24
军事文摘(2022年11期)2022-06-24
军事文摘(2022年11期)2022-06-24
小哥白尼(军事科学)(2022年2期)2022-05-25
小哥白尼(军事科学)(2021年5期)2021-08-30
军民两用技术与产品(2021年10期)2021-03-16
求学·理科版(2016年3期)2016-03-23
小哥白尼·军事科学画报(2009年4期)2009-05-11