探测器VLBI信号仿真方法*
2018-01-12 00:59朱亚立郑为民童锋贤
天文研究与技术 2018年1期
朱亚立,郑为民,童 力,童锋贤,张 娟,刘 磊
(1. 中国科学院上海天文台,上海 200030;2. 中国科学院射电天文重点实验室,江苏 南京 210008; 3. 上海市导航定位重点实验室,上海 200030;4. 中国科学院大学,北京 100049)
甚长基线干涉测量[1](Very Long Baseline Interferometry, VLBI)是20世纪60年代后期出现的一种射电天文技术。它具有空间分辨率高、测量精度高的特点,现已广泛应用于天体物理、天体测量、天文地球动力学和深空探测领域[2]。我国于2007年首次在探月工程中使用VLBI技术,建立了中国VLBI网(Chinese VLBI Network, CVN),包括上海佘山站、北京密云站、云南昆明站、乌鲁木齐南山站和上海VLBI数据处理中心。中国VLBI网已参加了探月工程嫦娥系列探测器的多次任务,对关键弧段的快速精密测定轨发挥了不可替代的重要作用[3-5]。
VLBI测站由天线、接收机、数据采集终端、时间频率系统等组成,工作时,各测站接收机天线汇集的射频信号放大后,经独立本振进行混频得到中频信号,然后传送至数字化终端,高速模数采样后作数字基带转换,得到所需频率通道的基频信号,最后经过编码,记录在磁盘或者直接通过网络传送到VLBI中心[5]。
为研究VLBI中心对不同探测器的测量方法,评估分析中心各功能模块的能力及整个系统的正确性、可靠性,目前常规做法是在每次飞行任务前开展大量实际目标联测。对单目标探测器的实际观测演练可评估测站与系统的可靠性。但对于那些全新的深空探测任务,在正式任务前有时难以找到合适的探测器作为试验对象。比如在后续探月工程中,将要开展针对月球轨道的交会对接,届时需要对月球距离的两个动态目标进行同波束测量。显然,目前没有类似的实际探测器可作为动态双目标的观测对象。若采用探测器VLBI信号仿真方法,则可根据探测器的数量、轨道、信标等特点,模拟生成VLBI终端接收的不同探测器信号,提供月球轨道双目标同波束VLBI测量数据,用于研究和改进VLBI处理模块。通过仿真与实际演练两种方法结合,可较好地评估VLBI中心与整个系统对双(多)目标探测器的测量能力。因此,研究VLBI信号仿真技术有重要意义与迫切工程需求。
在探月工程中,探测器下行VLBI射频信号为S/X频段,采用调相方式,调制信号在形式上主要包括点频信号和有限带宽信号两类。在仿真信号时,没有直接仿真射频信号,而是先将信号从射频变换至数字中频,然后再对中频信号采样,提取通道信号,最终生成用于验证VLBI数据处理系统的仿真数据,这样既完整地保留了调制信号频谱的主要特性,又避免了直接处理需极高采样率的射频信号。
1 探测器信号结构
在探月工程中,探测器VLBI下行射频信号采用调相方式,包括遥测信号、单向差分测距(Differential One-way Ranging, DOR)信号、测距信号、残留遥控信号(图1)。其中,下行载波、测距信号(测距主音和测距次音)和单向差分测距信号为点频信号;遥测信号和遥控信号为经过相位调制的有限带宽信号。这些信号统一调制在下行信号的主载波上,数学模型[5]为
(1)
其中,PT为总功率;fc为载波频率;d1(t)为遥测信号;θ1为遥测信号的调制指数;d2(t)为遥控信号;θ2为遥控信号的调制指数;f1为测距信号;φ1为测距信号的调制指数;f2为单向差分测距信号;φ2为单向差分测距信号的调制指数。
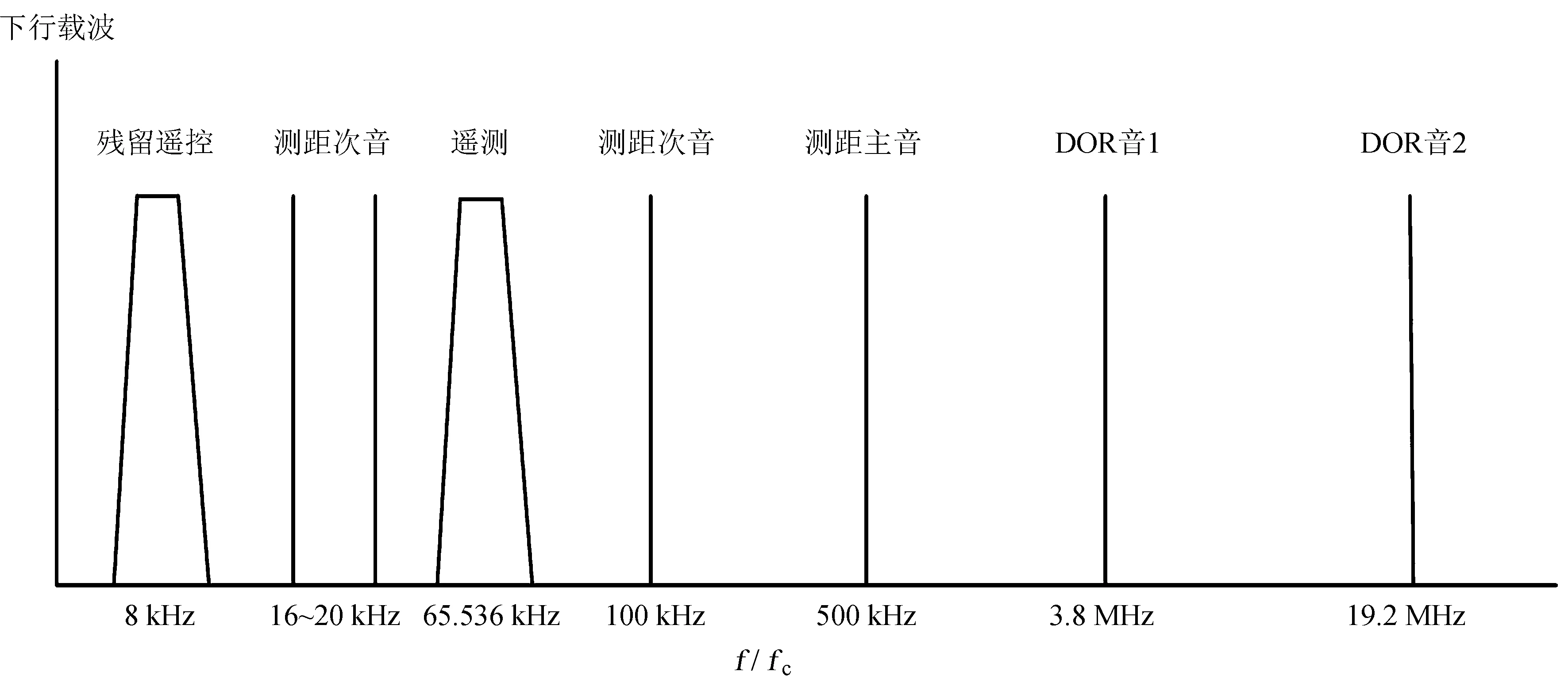
图1 X波段下行信号上边带频谱示意图
Fig.1 The spectrum of X band downlink signal
2 仿真原理与实现方法
2.1 探测器信号时延模型构造
VLBI测站与探测器之间存在相对运动,因此在仿真时要考虑相对运动效应引起的测站接收探测器信号的时间延迟(时延)及其变化[5]。时延包含几何时延、引力时延、天线时延修正、源结构时延修正、中性大气与电离层时延修正等[6],其中,几何时延是理论时延的主要部分,随目标的运动而变化。
设地心O、测站A及探测器B(图2),g0(t)表示t时刻参考点(地心)接收到信号波前的光行时;g1(t)表示t时刻参考点(地心)信号波前超前到达测站的光行时;g2(t)表示t时刻参考点(测站)接收到信号波前的光行时。若t2时刻从探测器B发出信号,同一波前到达地心O、测站A的时刻分别为t0,t1,则根据定义,g0(t0),g1(t0)及g2(t1)分别为
g0(t0)=t0-t2,
g1(t0)=t1-t0,
g2(t1)=t1-t2,
(2)
显然,
g2(t1)=g0(t0)+g1(t0).
(3)
在实际应用中,每个观测弧段的时延模型都以五次时延多项式表示:
g(t)=b0+b1t+b2t2+b3t3+b4t4+b5t5,
(4)
其中,b0,b1, ...,b5为时延模型多项式系数。
根据实际时延模型g0(t),g1(t),用最小二乘法作五次多项式拟合,得到时延模型g2(t)。
2.2 时延模型线性近似
为减少计算量,在短时间内假设时延模型随时间线性变化,即
(5)
其中,系数b0,b1在短时间内为恒常数,忽略时延模型g2(t)高次项。
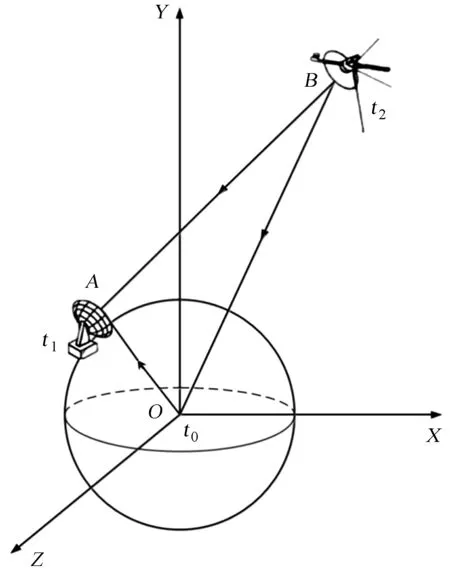
图2 VLBI时延示意图
Fig.2 The diagram of VLBI delay
在短时间内用(5)式表示线性化时延模型存在一定误差,误差大小取决于用线性近似的时间长度和五次时延多项式中高次项系数。相关处理机[7]使用皮秒量级的时延模型精度足以满足应用需求,故误差值在0.01 ps(1 e-14 s)以内的模型误差即可视为满足仿真精度要求。在较短的观测时间内,时延模型g2(t)的二次项是线性近似的主要误差项,其系数b2一般为e-11量级,要想使得该项引起的时延误差小于0.01 ps,选定的线性化时间长度应小于0.01 s。其他高次项的系数b3,b4,b5,一般在e-14量级,由此引起的误差可忽略。
2.3 构造中频信号
探测器下行载波信号的类型主要包括点频信号和有限带宽信号。其中点频信号包括:载波、测距信号和单向差分测距信号。有限带宽信号包括遥测信号和遥控信号,是以正弦波为载波的调相信号,调制方式为PCM/PSK/PM,一般可表示为sin(2πft+θ),用相位θ的变化传递数字信息。对于二进制相移键控信号,θ以0/π交替变化表示二进制位0/1, 1对应相位0,-1对应相位π。因此遥测和遥控信号又可表示为Asin(2πft),A随相位θ的变化而变化。
为完整地保留调制信号及其边带频谱,选择中频信号约为60 MHz。有限带宽信号的码速率最大为2 048 bit/s,码元变化周期是采样周期的两万九千多倍。在一个码元周期内,有限带宽信号保持不变,对其采样可仿真遥测和遥控有限带宽信号。因此,需选择合适的时间尺度对点频信号和有限带宽信号采样,仿真中频信号。
为简约起见,根据(1)式探测器转发的下行信号的一般形式,分析其中典型的点频信号、有限带宽信号多普勒效应影响。信号表达式如下:
f(t)=sin[2πfct+θ1Asin(2πf3t)+φ2sin(2πf2t)],
(6)
其中,fc,f2分别为载波和点频单向差分测距信号;f3为有限带宽遥测信号;A为遥测信号的幅值;θ1,φ2为调制系数。

(7)
将(5)式和(6)式代入(7)式,得到:
(8)
根据(8)式,探测器下行信号在频域上表现为关于载波左右对称,其频谱主要分布在[(1-b1)(fc-fmax), (1-b1)(fc+fmax)],其中fmax为max(f3,f2),b1≪1。
(9)
其中,fd为信号起始频点(1-b1)(fc-fmax)。
对比(9)式与(8)式,只是载波频率发生变化,其余信号不变。即通过降低载波频率,将信号从射频搬移到中频,且信号f3,f2前后保持不变。
综上,VLBI测站接收信号是添加时延的射频信号,由(1)式添加时延并降低载波频率,得到包含多普勒效应的中频信号,形式如下:
(10)
其中,f4为遥控信号;A′为遥控信号幅值。
2.4 VLBI终端信号仿真
图3显示了仿真VLBI终端接收信号实现流程。先仿真带有多普勒效应的探测器VLBI下行中频信号,再滤波得到某个通道的频率区间,通过希尔伯特变换保留正频率部分,再通过数字变频移频至基带,经希尔伯特逆变换取实信号,最后通过重采样降低采样率得到通道实信号。通道宽度为2 MHz时,采样率取4 MHz。
3 数值试验
3.1 仿真探测器下行中频信号
根据上述方法采用某月球探测器信标实际参数仿真了探测器VLBI下行中频信号,其中包含测距信号(500 kHz主音频率)、遥测信号(副载波65.536 kHz且码速率256 bit/s)和两对单向差分测距信号。高频信号起始频点fd为8 460 MHz,降低载波频率后生成探测器下行中频信号,采样率117 MHz,快速傅里叶变换点165 000。
图4显示带宽58.5 MHz的探测器下行中频信号频谱。图中,箭头3为载波信号,2和4是距载波约3.85 MHz的第1对单向差分测距信号(DOR1);1和5是距载波约19.27 MHz的第2对单向差分测距信号(DOR2),载波两侧500 kHz处是测距主音信号。另外,有限带宽的遥测信号(带宽约0.5 kHz)靠近载波。
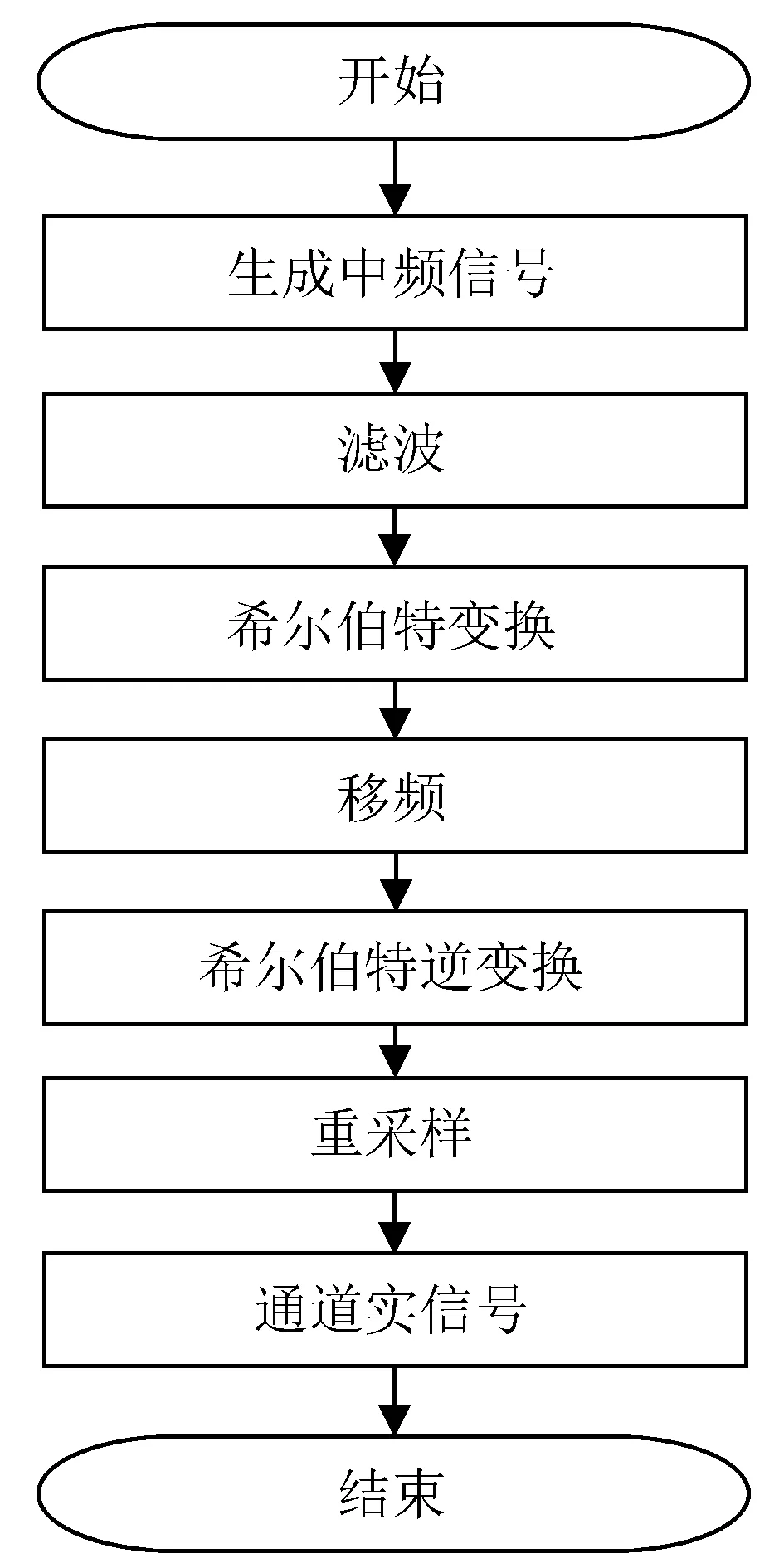
图3 信号仿真流程图
Fig.3 Steps of signal simulation
测距信号、遥测信号、单向差分测距信号关于载波对称,调制系数决定各信号的功率分配,其中载波、测距信号和单向差分测距信号较为明显。由于快速傅里叶变换的栅栏效应使图中载波两侧对应频点幅值产生细微差别。其他信号谐波项能量较小,幅度基本在-180 dB以下。
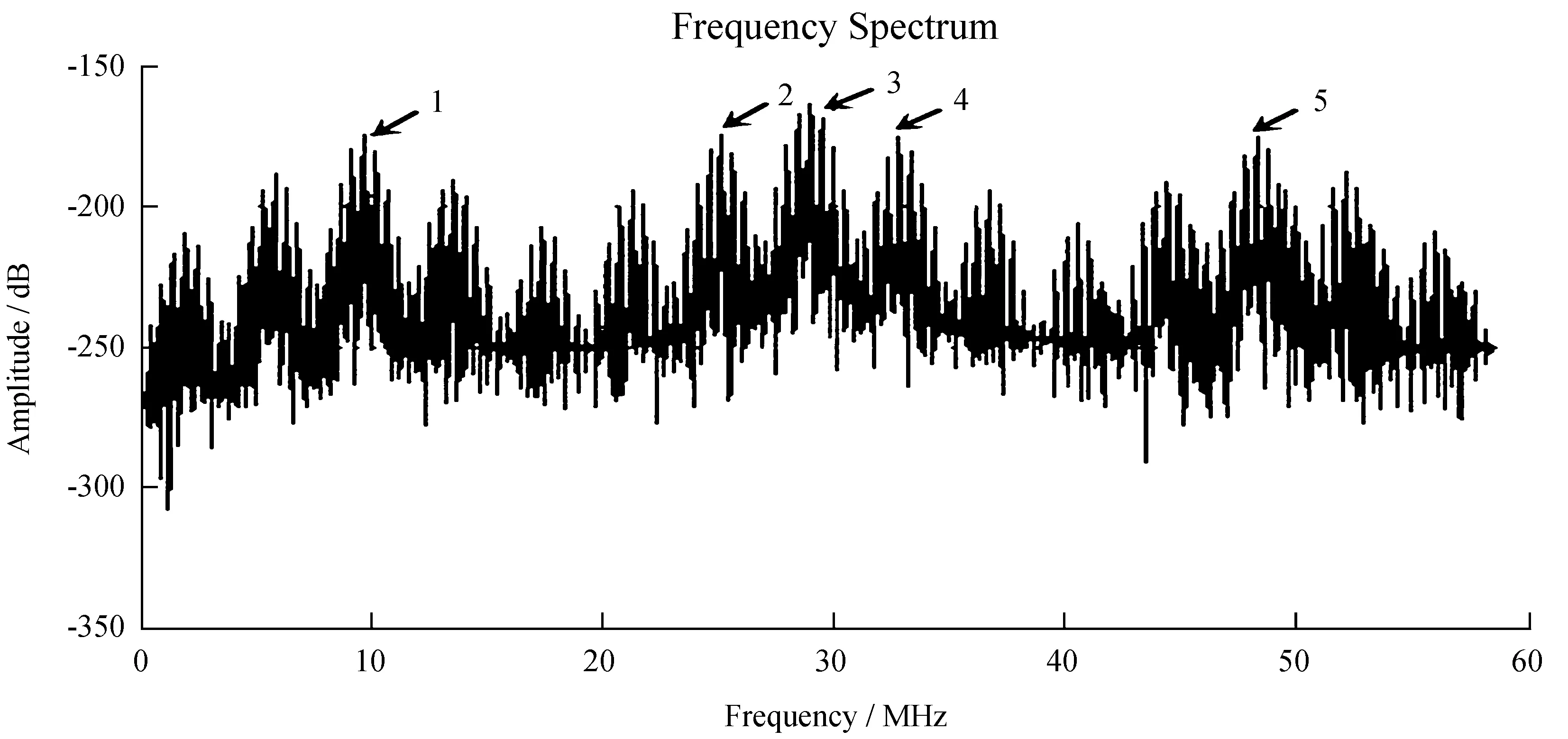
图4 探测器下行中频信号频谱图
Fig.4 The spectrum of downlink probe quasi-intermediate-frequency signal
3.2 可行性验证
通过仿真信号与VLBI终端接收信号的对比以及对VLBI相关处理结果的分析,验证了探测器VLBI信号仿真方法的可行性。
图5(a)为实际信号单通道自功率谱,从中可观察到0.96 MHz处的载波信号;距离载波500 kHz、65.536 kHz的测距主音信号和遥测信号;其他为信号谐波项。
图5(b)为仿真VLBI终端接收信号自功率谱(采样率4 MHz,快速傅里叶变换点262144,采样1 s),包含载波信号、测距信号(500 kHz主音频率)、遥测信号(副载波65.536 kHz且码速率1 024 bit/s)、高斯白噪声信号。频率0.968 MHz处为载波信号,测距主音信号和有限带宽的遥测信号分别距离载波500 kHz、65.536 kHz,关于载波对称。距离测距主音65.536 kHz、131.072 kHz且关于测距主音对称的为遥测信号谐波项。
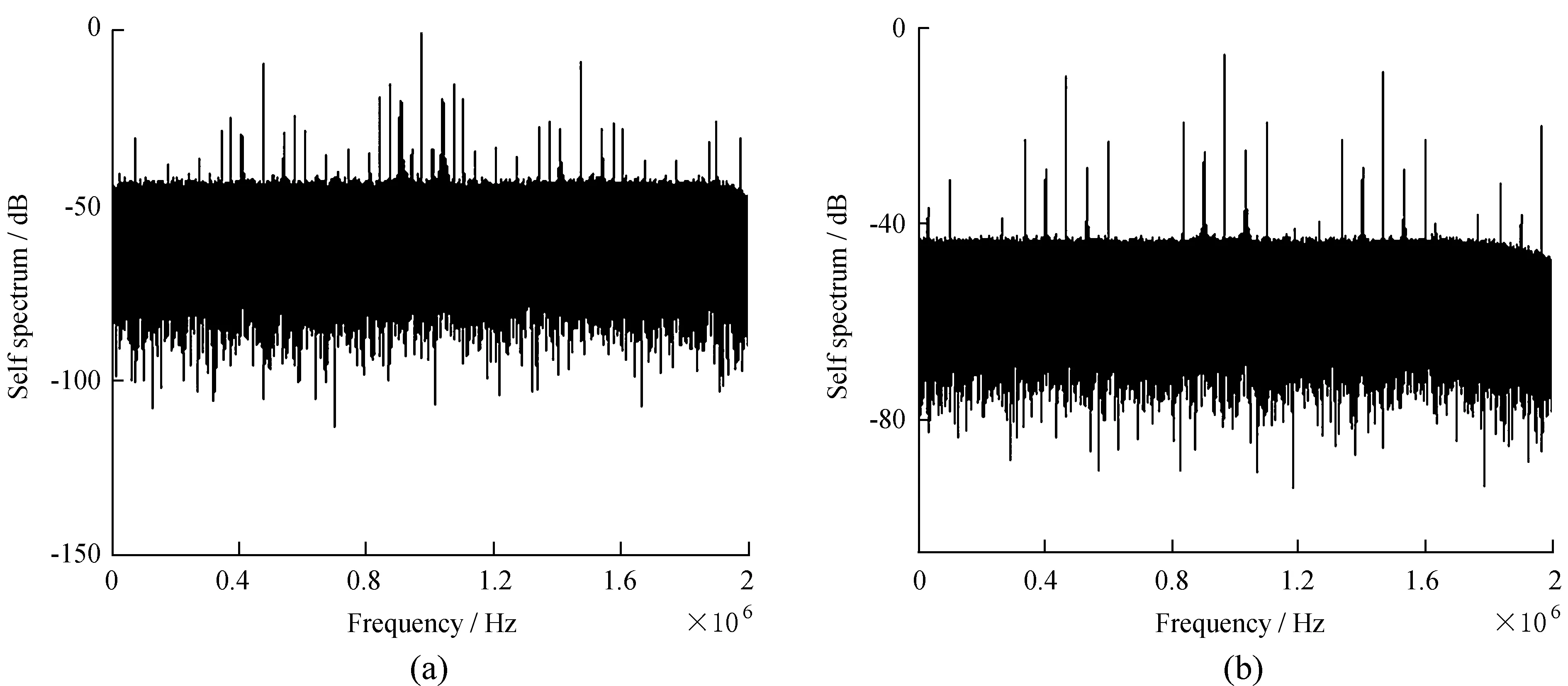
图5 单通道自功率谱图 (a)实际信号;(b)仿真信号
Fig.5 The auto-power spectrum of channel signal (a) The auto-power spectrum of real signal; (b) The auto-power spectrum of simulation signal
仿真信号与对应的实际信号对比表明,载波信号、测距信号、遥测信号的频率和功率分配与实际信号一致,噪声信号的功率和分布也与实际信号相同,验证了仿真方法的可行性。
探测器VLBI下行中频信号分别添加不同时延模型,仿真两台站终端接收信号(采样率4 MHz,快速傅里叶变换点512,采样1 s)。经过VLBI相关处理,可得互功率谱幅度和相位图(图6)。图6(a)的幅度谱显示,载波信号和遥测信号在[0.8 MHz,1.2 MHz]频段,遥测信号的谐波项和测距信号在[0.4 MHz, 0.6 MHz],[1.4 MHz, 1.6 MHz]频段。图6(b)的相位谱显示,在载波信号、遥测信号、测距信号分布的主要频段,相位谱有明显相关条纹,其它频段的点由于信号较弱,相位分布弥散,条纹较弱,验证了不同台站接收的探测器VLBI下行仿真信号的相关性。
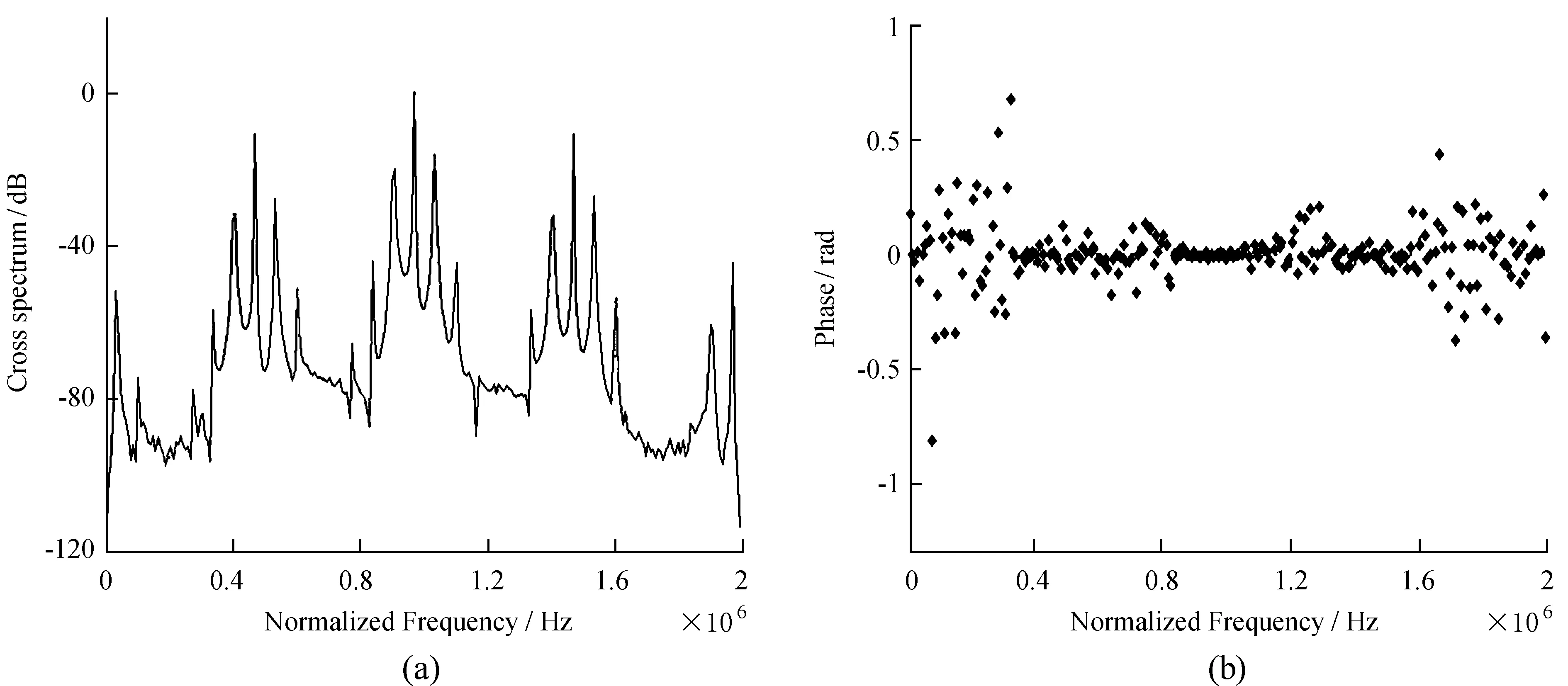
图6 仿真两站信号互功率谱图 (a)幅度谱;(b)相位谱与条纹
Fig.6 The cross-power spectrum of two station simulation signal. (a) The amplitude spectrum; (b) The phase spectrum and strip
4 结 论
本文在研究探测器信号结构的基础上,分析了包含探测器下行点频信号和有限带宽信号的VLBI终端信号仿真方法,构造了中频信号仿真VLBI数字终端接收信号。采用最小二乘法可构造出满足精度的时延模型,用于模拟多普勒效应。通过仿真数字终端信号与实际信号的比较以及对不同台站的仿真信号作相关处理,验证了探测器VLBI信号仿真方法的可行性。后续建立仿真各模块误差分析模型,完善仿真系统,为月球探测器VLBI信号仿真的应用,乃至火星探测器VLBI信号仿真的研究打下良好的基础。
[1] Thompson A R, Moran J M, Swenson Jr G W. Interformetry and synthesis in radio astronomy[M]. Weinheim: Wiley Vch & Sons, 2004: 33-37.
[2] 魏杰昌, 郑为民, 童力. 带有时延的VLBI数字基带信号仿真[J]. 中国科学院上海天文台年刊, 2015(36): 124-135.
Wei Jiechang, Zheng Weimin, Tong Li. Simulation of VLBI digital baseband signal with time delay[J]. Annals of Shanghai Astronomical Observatory Chinese Academy of Sciences, 2015(36): 124-135.
[3] 江悟, 沈志强, 舒逢春, 等. 利用DiFX处理CVN天文观测数据进展[J]. 天文学进展, 2014, 32(4): 516-524.
Jiang Wu, Shen Zhiqiang, Shu Fengchun, et al. The progress of adapting DiFX correlator for Chinese VLBI network[J]. Progress in Astronomy, 2014, 32(4): 516-524.
[4] 郑鑫, 刘庆会, 吴亚军, 等. 基于同波束VLBI差分相延迟的 “玉兔” 月球车动作监视分析[J]. 中国科学: 物理学 力学 天文学, 2014, 44(8): 872-878.
Zheng Xin, Liu Qinghui, Wu Yajun, et al. Motion monitoring and analysis of Chang′E-3 rover based on same-beam VLBI differential phase delay[J]. Science Sinica: Physica, Mechanica & Astronomica, 2014, 44(8): 872-878.
[5] 钱志瀚, 李金岭. 甚长基线干涉测量技术在深空探测中的应用[M]. 北京: 中国科学技术出版社, 2012: 1-14.
[6] 童锋贤. 深空探测器VLBI相位参考测量关键技术研究[D]. 北京: 中国科学院大学, 2016.
[7] 陈中, 郑为民. VLBI软件相关处理机现状和发展趋势[J]. 天文学进展, 2015, 33(4): 489-505.
Chen Zhong, Zheng Weimin. Current status and development of VLBI software correlator[J]. Progress in Astronomy, 2015, 33(4): 489-505.
猜你喜欢
测绘地理信息(2022年2期)2022-04-02
遥测遥控(2022年1期)2022-02-11
纺织科学研究(2021年6期)2021-12-02
数学小灵通(1-2年级)(2021年9期)2021-10-12
陕西水利(2021年5期)2021-06-21
全球定位系统(2020年1期)2020-03-31
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年11期)2019-07-04
阅读(书香天地)(2018年12期)2018-05-14