
基于预见控制的甲板运动跟踪控制研究
2018-01-11 12:43:28甄子洋覃海群
电光与控制 2017年11期
马 坤, 甄子洋, 覃海群
(南京航空航天大学自动化学院,南京 211106)
基于预见控制的甲板运动跟踪控制研究
马 坤, 甄子洋, 覃海群
(南京航空航天大学自动化学院,南京 211106)
甲板运动是舰载机完成海上作战任务的关键影响因素之一。针对无人舰载机着舰过程中甲板运动干扰问题,设计了基于最优预见控制的甲板运动补偿器,并与基于卡尔曼滤波算法的甲板运动预估器相结合,组成甲板运动跟踪控制系统。该系统利用了甲板运动预估信息以及预见控制提前操作的特点,可有效避免传统甲板补偿系统的相位延迟。最后,以非线性小型固定翼无人机模型为研究对象进行数值仿真,仿真结果表明,该系统能够有效跟踪甲板运动,从而提高无人机着舰成功率。
无人机; 着舰; 最优预见控制; 甲板运动补偿; 甲板运动跟踪
0 引言
安全有效的着舰回收控制是无人机发挥海上作战能力的关键技术之一[1]。着舰过程的最后阶段主要通过跟踪既定的下滑道完成,复杂的海上环境,尤其是海浪作用下的甲板运动使得着舰过程变得困难。甲板运动通过改变理想着舰点位置而使得理想着舰下滑道发生变化,尤其是纵向甲板运动,可改变无人机理想着舰高度,使其面临撞舰的危险。因此,在着舰末段加入纵向甲板运动跟踪控制系统具有重要研究价值。
关于甲板运动补偿,国内外众多学者研究了相位超前网络的建立[2-3],但由于超前网络补偿能力有限,效果并不是很好。文献[4]提出了一种将基于粒子滤波预估器与超前网络相结合的补偿方法,改善了甲板运动跟踪性能,但并不能从根本上解决控制系统延迟。文献[5]在无人机着舰制导与控制领域取得了丰硕的研究成果。本文在此基础上,针对航母甲板运动补偿控制问题,提出一种将甲板预估器与最优预见控制相结合的纵向甲板运动补偿系统,即将甲板运动预估器产生的预估信号作为可预见的未来信息引入预见控制器,通过对未来信息的利用提前对控制输入进行调节,以减小系统相位延迟及跟踪误差,提高着舰成功率。
1 无人机建模及最优预见控制器设计
本章给出无人机建模及基于最优预见控制的飞控系统设计过程,为仿真提供实验数据,以验证甲板运动跟踪性能。
1.1 无人机建模
常规布局的无人机模型一般通过微分方程表示[6]

(1)

本文研究基于离散线性模型的最优预见控制,因此需要对式(1)的非线性模型进行离散线性化。通过小扰动线性化方法得到无人机着舰段配平状态下的线性模型
(2)
(3)
式中:Xlon=(ΔVΔαΔqΔθ)T为纵向状态量;Ulon=(ΔδeΔδT)T为纵向控制输入量;Xlat=(ΔβΔpΔrΔφΔψ)T为横侧向状态量;Ulat=(ΔδaΔδr)T为横侧向控制输入量。
对于式(2)和式(3)的无人机模型,应用最优预见控制实现下滑道的跟踪控制,需要将纵向高度信息和横侧向侧偏信息作为状态量融合至无人机线性模型。根据无人机导航方程组

(4)
以及小扰动飞行状态下
(5)
得到飞行高度及侧偏距与飞机状态变量之间关系表达式,即

(6)
将式(6)中控制目标量分别融合到式(2)和式(3),即可得到包含外环轨迹状态信息的无人机线性模型。
1.2 最优预见控制器设计
最优预见控制是在传统最优控制基础上增加了目标值前馈控制的控制方法,其控制器结构如图1所示,该控制器特点是对于目标值可预见的控制问题具有良好的控制效果。
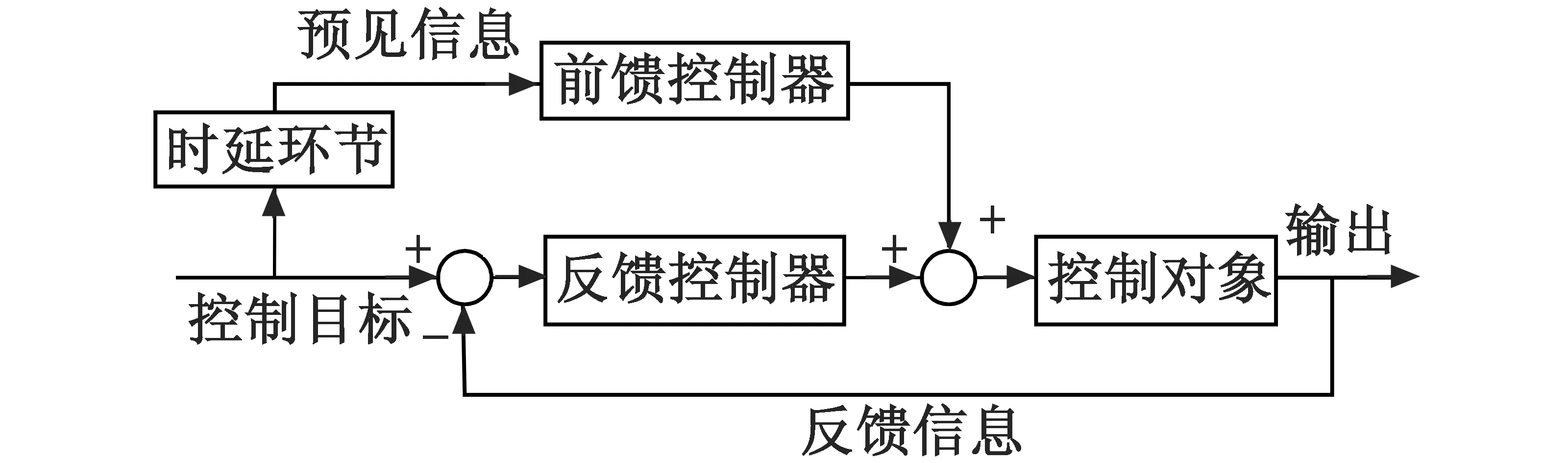
图1 最优预见控制器结构图Fig.1 Structure diagram of optimal preview controller
考虑线性离散系统

(7)
式中:X(k)∈Rn为状态变量;Y(k)∈Rm为输出变量;U(k)∈Rr为输入变量;A,B,C为相应维度的状态矩阵。
假设式(7)系统可控可观测,且r≥m。设目标信号为R(k),定义误差信号为
e(k)=R(k)-Y(k)
(8)
导出如下误差系统(Δ表示差分算子)

(9)

Xe(k+1)=GXXe(k)+GUΔU(k)+GRΔR(k) 。
(10)
对于式(10)的误差系统,假设从当前时刻至未来MR步(即未来T时刻,T=TS·MR)的目标值信息已知,定义如下包含误差项与输入项的二次型评价函数

(11)
式中:Q为半正定矩阵;H为正定矩阵。
最优预见控制目标就是得到最优控制输入U(k),使得上述评价函数值最小。
当ΔR(k+1)=0时,根据最优调节理论[8],最优输入ΔU(k)为
(12)


(13)
现在假设从当前时刻至未来MR步的目标值信号已知,则最优预见控制输入为

(14)
式中,FR为待求解的前馈控制系数。将式(14)代入式(11),根据偏微分最优化算法,求得

(15)

2 甲板运动建模与预估
2.1 甲板运动建模
甲板运动即为海浪作用下的舰船运动,包括6个自由度:沿舰体轴的线运动(纵荡、横荡和沉浮)和绕舰体轴的角运动(偏摆、俯仰和滚转)。由于相互之间耦合作用较小,通常将甲板运动分为纵向和横侧向来研究。纵向运动包括纵荡、俯仰和沉浮运动,其中沉浮运动对纵向高度影响最为严重,本文主要研究纵向甲板运动补偿技术。
关于甲板运动建模,国内外研究主要集中在两种方案上[8]:1) 基于正弦波组合的确定性数学模型;2) 基于功率谱模型的随机模型。为更加准确地模拟甲板运动的随机性,本文研究采用方案2)的甲板运动模型。该模型建模思路为:通过对甲板运动功率谱密度函数进行系数寻优,得到相应的成型滤波器传递函数,将白噪声通过上述传递函数即可得到甲板运动的时域信息。参考文献[9],中等海况下沉浮运动成型滤波器传递函数为

(16)
白噪声噪声功率设置为1,采样时间为0.1 s,可得中等海况沉浮运动仿真模拟曲线如图2所示。
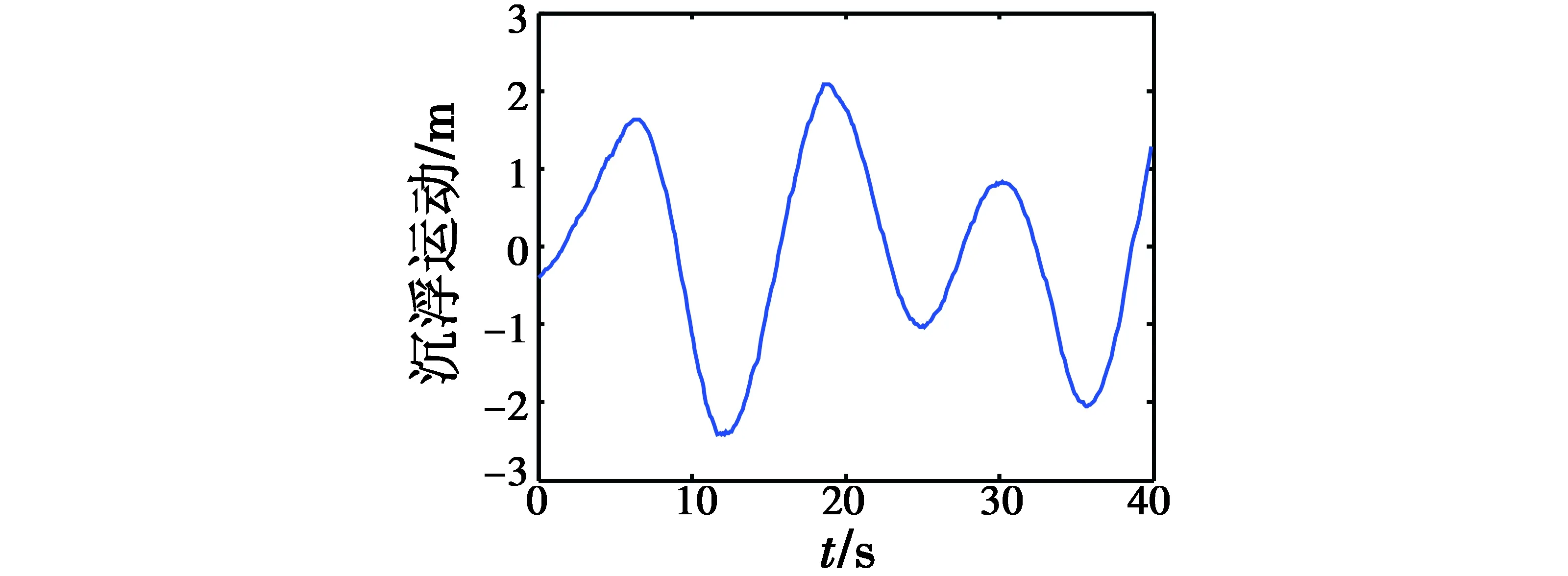
图2 基于功率谱密度函数的甲板沉浮运动Fig.2 Power spectrum density function based deck heaving motion
2.2 甲板运动预估
为了获得甲板未来几秒内的运动信息,需要对甲板运动进行预估。常用的预估算法有卡尔曼滤波算法、时间序列分析法、人工神经网络算法等。其中,卡尔曼滤波算法相对简单,更加具有实用价值,因此应用最广。
本文设计基于卡尔曼滤波算法的甲板运动预估器,该算法以离散时间序列进行递推解算,因此需要建立甲板运动离散数学模型。首先,利用传递函数最小实现算法,得到式(16)的状态空间方程表达形式,然后通过选取适当的离散周期,可得如下所示的离散甲板运动模型
(17)
式中:Φk,k-1为状态转移矩阵;Γk,k-1为噪声系数矩阵;Hk为观测系数矩阵;vk为观测噪声。

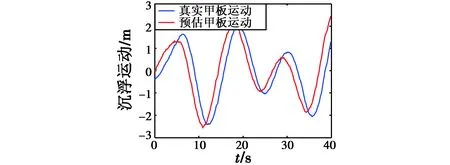
图3 基于卡尔曼滤波算法的甲板运动预估Fig.3 Kalman filtering based deck motion prediction
从图3可以看出,基于卡尔曼滤波算法的甲板运动预估器可以有效预估甲板运动,误差小于0.2 m,满足设计要求。
3 基于预见控制的甲板运动补偿系统仿真
区别于传统补偿器设计,本文基于最优预见控制的纵向甲板运动补偿器融合在飞控系统内部,如图4所示。首先通过基于卡尔曼滤波算法的预估器得到未来几秒内甲板沉浮运动信息,然后将此预估信息与理想状态下飞机下滑道高度信息相融合,作为基于最优预见控制的飞控系统需要跟踪的真实下滑道高度的预见信息,该预见信息最终通过预见前馈控制通道调节最优预见控制律。
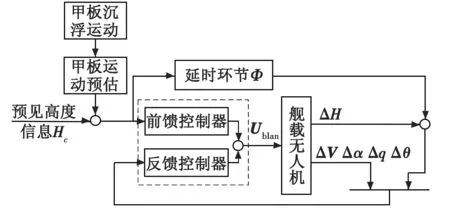
图4 基于预见控制的纵向甲板运动补偿系统Fig.4 Preview control based longitudinal deck motion compensation system
3.1 仿真条件
最优预见控制器采样时间设置为0.1 s,预见步数设置为20,采用美军“银狐”无人机为仿真对象[10-11],无人机着舰段的配平状态如表1所示。
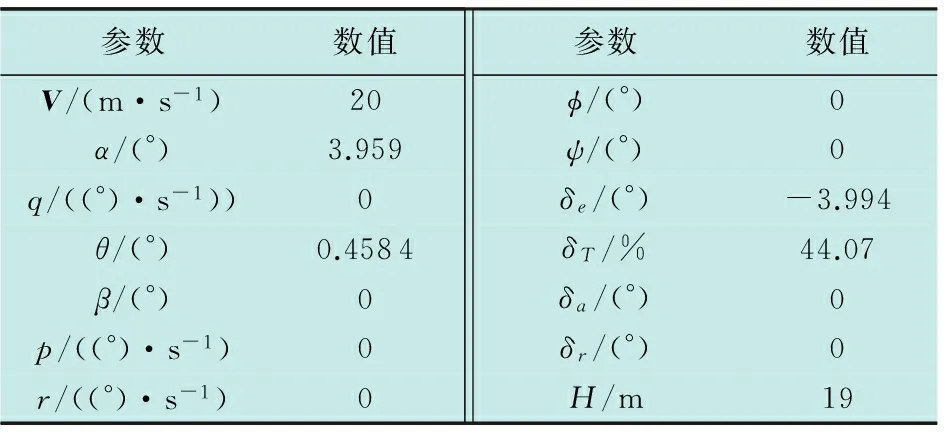
表1 无人机着舰状态配平值
在上述配平状态下,通过小扰动线性化方法,得到无人机纵向模型状态矩阵为
3.2 仿真结果
为验证本文所设计的纵向甲板运动补偿控制器跟踪效果,分别在平稳、中等及恶劣海况下进行了甲板运动跟踪补偿仿真试验。图5~图7分别给出了3种不同海况下纵向甲板运动跟踪仿真曲线。其中,曲线1为甲板运动曲线,曲线2为本文设计的基于最优预见控制的甲板运动跟踪曲线,曲线3为基于传统最优控制的甲板运动跟踪曲线。
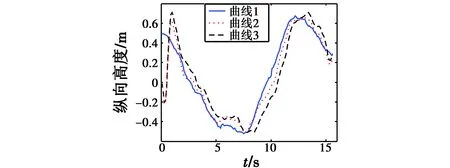
图5 平稳海况下甲板运动跟踪控制曲线Fig.5 Deck motion tracking control curve under stable sea conditions
由仿真结果可以看出,在平稳海况下,两种控制方法都具有较高的甲板运动跟踪精度,其中预见控制更佳:在中等海况下,预见控制对甲板运动的跟踪效果明显优于最优控制;在恶劣海况下,预见控制同样显示了更精确的甲板运动跟踪性能。其实,预见控制的性能除了跟权重矩阵相关外,还跟预见步数密切相关,预见步数的选取与实际问题的复杂性和控制要求有关,若是合理选取预见步数,既能保证实时性,又能获得满意的控制效果。
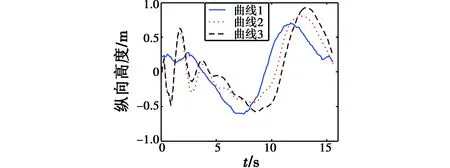
图6 中等海况下甲板运动跟踪控制曲线Fig.6 Deck motion tracking control curve under medium sea conditions

图7 恶劣海况下甲板运动跟踪控制曲线Fig.7 Deck motion tracking control curve under severe sea conditions
4 结论
为了克服无人机着舰过程末段纵向甲板运动的干扰,设计了基于卡尔曼滤波算法与最优预见控制相结合的纵向甲板运动补偿控制系统。通过最优预见控制有效利用了甲板预估器产生的甲板沉浮运动的未来预估信息,提高了甲板运动补偿精度和动态响应速度。非线性无人机模型的仿真结果表明,基于预见控制的甲板运动补偿控制系统在平稳、中等、恶劣海况下都具有比传统最优控制更优的甲板运动跟踪精度,从而提高了无人机着舰控制精度。
[1] LU K K,CHENG N.An autonomous carrier landing system design and simulation for unmanned aerial vehicle[C]//2014 IEEE Chinese Guidance,Navigation and Control Conference,IEEE,2015: 1352-1356.
[2] URNES J M,HESS R K.Development of the F/A-18A automatic carrier landing system[J].Journal of Guidance, 1985,1(2):289-295.
[3] 陈华坤,章卫国,王新民.舰载机纵向自动着舰控制系统设计[J].弹箭与制导学报,2007,27(1):73-76.
[4] 周鑫,彭荣鲲,袁锁中,等.舰载机着舰纵向甲板运动预估及补偿技术[J].南京航空航天大学学报,2013,45(5):599-604.
[5] 杨一栋,甄子洋,邱述斌,等.无人机着舰制导与控制[M].北京:国防工业出版社,2013.
[6] 吴森堂.飞行控制系统[M].2版.北京:北京航空航天大学出版社,2010.
[7] 王秋晰.随机微分方程最优控制理论的若干问题[D].吉林:吉林大学,2015.
[8] 王科俊.海洋运动体控制原理(船舶与海洋工程系列)[M].哈尔滨:哈尔滨工程大学出版社,2007.
[9] 张永花.舰载机着舰过程甲板运动建模及补偿技术研究[D].南京:南京航空航天大学,2012.
[10] CHUA C S.Generic UAV modeling to obtain its aerodynamic and control derivatives[D].Monterey:Naval Pestgraduate School,2008.
[11] HALLBERG E,KOMLOSY J,RIVERS T,et al.Development and applications of a rapid flight test prototyping system for unmanned air vehicles[C]//The 18th International Congress on Instrumentation in Aerospace Simulation Facilities,IEEE,1999:2601-2610.
ResearchonPreviewControlBasedDeckMotionTrackingControl
MA Kun, ZHEN Zi-yang, QIN Hai-qun
(College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 211106,China)
The deck motion has been one of the key factors influencing the implementation of sea fight missions of carrier-based aircrafts.To decrease the interference of the deck motion during the landing process of the UAVs,we designed a deck motion compensator based on optimal preview control,which was used to form a deck motion tracking control system with the Kalman-filtering-based deck motion predictor.The system can effectively avoid the phase delay of the traditional deck compensation system by using the deck motion prediction information and the features of preview control operation.Finally,the small nonlinear fixed-wing UAV model was used for simulation.The simulation results show that the system can effectively track the deck motion,and thus improve the success rate of UAV landing.
UAV; deck landing; optimal preview control; deck motion compensation; deck motion tracking
马坤,甄子洋,覃海群.基于预见控制的甲板运动跟踪控制研究[J].电光与控制,2017,24( 11) : 74-77,99.MA K,ZHEN Z Y,QIN H Q.Research on preview control based deck motion tracking control[J].Electronics Optics & Control,2017,24( 11) : 74-77,99.
2016-11-21
2017-02-17
国家自然科学基金 (61304223,61673209);中央高校基本科研业务费专项资金 (NJ20160026,NZ2015206)
马 坤(1991 —),男,山东泰安人,硕士生,研究方向为先进飞行控制。
V249.12
A
10.3969/j.issn.1671-637X.2017.11.015
猜你喜欢
装备制造技术(2020年3期)2020-12-25 05:22:08
船舶标准化工程师(2020年1期)2020-06-12 09:16:34
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
国防(2017年12期)2017-04-09 07:52:09
反射疗法与康复医学(2017年7期)2017-01-16 01:11:18
电源技术(2016年9期)2016-02-27 09:05:39
船海工程(2015年4期)2016-01-05 15:53:38
应用海洋学学报(2015年3期)2015-11-22 07:39:14
实用手外科杂志(2015年2期)2015-08-28 09:50:44
电源技术(2015年1期)2015-08-22 11:16:28
