
量化因子自整定的四旋翼飞行器模糊PID控制
2018-01-11 06:15:43葛霖,王华
电光与控制 2017年7期
葛 霖, 王 华
(北京航空航天大学宇航学院,北京 100191)
量化因子自整定的四旋翼飞行器模糊PID控制
葛 霖, 王 华
(北京航空航天大学宇航学院,北京 100191)
针对四旋翼飞行器的非线性飞行控制模型,提出了一种新改进的量化因子自整定二维直接控制量型模糊PID控制器。通过分析量化因子与模糊控制器输入输出的模糊逻辑关系,对量化因子分别设计模糊整定器并确定了相应的模糊输入量以及模糊规则表,然后利用自整定算法实现量化因子在线实时调整。通过对四旋翼飞行器进行动力学建模以及控制通道分析,进行了姿态飞行控制仿真实验。与传统PID型模糊控制器相比,本文设计的控制器在动态响应速度及抗外界干扰性能方面效果更优。
四旋翼飞行器; 姿态控制; 模糊PID控制; 量化因子; 自整定; 模糊整定器
0 引言
四旋翼飞行器是一种非线性、多变量、高度耦合的欠驱动系统,飞行控制技术一直是其中的关键技术和研究重点。目前四旋翼飞行器飞行控制研究主要是针对姿态稳定及跟踪控制,虽然已有许多学者对多种控制算法如神经网络控制[1]、反馈线性化[2]以及自适应滑模控制[3]等进行了研究,但大多需要加入许多约束和简化,因此一些不依赖于精确数学模型的控制方法在实际中仍然被广泛应用。
QIAO等人[8]曾提出一种PID型模糊控制结构,并利用峰值观测器对其控制性能进行了在线调整优化;然后YESIL等人[9]针对负荷频率控制问题,对QIAO提出的在线调整算法进行了修改调整,提高了峰值观测器的优化效果。但两种优化方法都是在观测到系统响应振荡峰谷值之后进行参数调节,因此具有一定的优化滞后性;后来PAN等人[10]又利用粒子群优化(PSO)以及遗传优化(GA)算法分别对控制器的参数进行了优化和对比,但并未对控制器参数进行实时的调整。因此,本文针对该类控制器参数在不同阶段的实时优化问题进行了改进研究,并通过对四旋翼飞行器非线性模型进行控制仿真,验证了本文提出控制器的有效性。
1 四旋翼飞行器非线性数学模型
四旋翼飞行器的结构如图1所示。为了建立四旋翼飞行器的动力学模型,对其作如下假设:飞行器为均匀对称的刚体,其几何中心与质心重合;在低速无风条件下,忽略机身空气阻力以及高度等因素的影响;4个旋翼关于质心对称分布,按位置分为2组且旋向相反,可以平衡旋翼阻力产生的反扭矩。
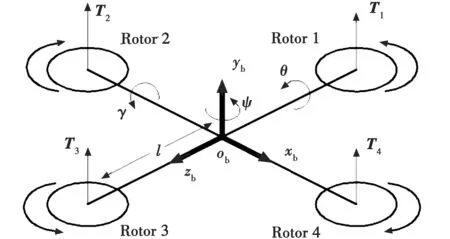
图1 四旋翼飞行器结构示意图Fig.1 Schematic diagram of quadrotor aircraft
首先引入以质心为原点的机体坐标系obxbybzb,3轴分别指向机身前方、上方和右方。则飞行器在机体坐标系下的动力学和运动学方程为
(1)
(2)
(3)
式(1)~式(3)中 :u,v,w和p,q,r分别为机体坐标系下xb,yb,zb轴方向的速度和角速度;m为全机质量;I为惯性矩阵;γ,ψ,θ分别为飞行器的滚转角、偏航角和俯仰角3个姿态角;F和M分别为作用在机体坐标系下的合力向量与合力矩向量。对于旋翼产生的升力T以及克服的空气阻力矩大小Q可建模如下
(4)
式中:k1和k2分别为旋翼升力系数和阻力矩系数,与空气密度、旋翼半径及翼型等参数有关;ω为旋翼转动角速度,由此可以将F和M分别表示为
(5)
。
(6)
2 量化因子自整定PID型模糊控制器
2.1PID型模糊控制器
本文所采用的PID型模糊控制器如图2所示。
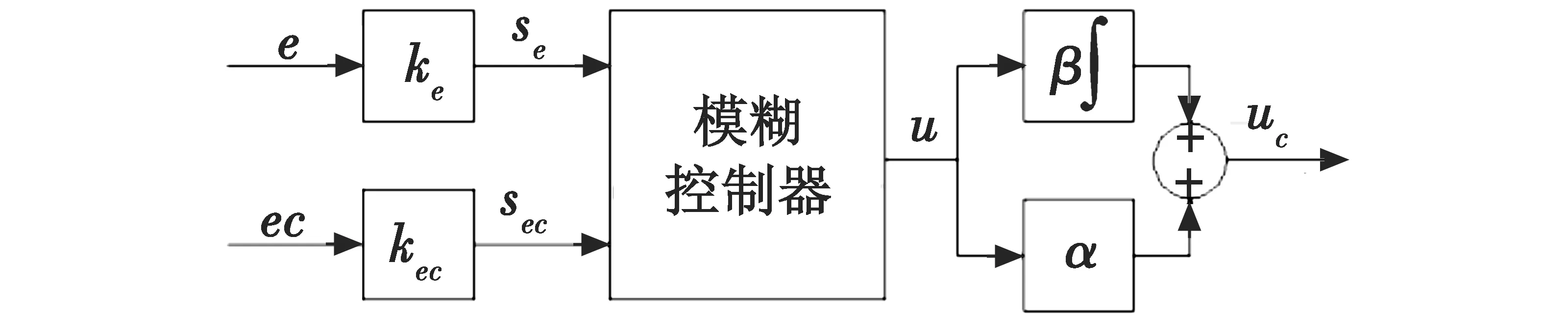
图2 PID型模糊控制器Fig.2 PID type fuzzy controller
输入量分别为误差e(k)和误差变化率ec(k),经量化因子(ke,kec)放缩后即为模糊输入量

。
(7)
首先对输入量se,sec和输出量u在论域[-1,1]上进行模糊化,并且选择标准的三角函数作为隶属度函数。对se,sec使用5个模糊语言值,分别表示为SE,SEC;对于u使用7个模糊语言值,表示为U。具体如下

(8)
式中,模糊语言值NB,NM,NS,ZE,PS,PM,PB分别表示负大、负中、负小、零、正小、正中、正大。se,sec和u三者相应的隶属度函数分布如图3所示。

图3 模糊控制器隶属度函数分布Fig.3 Membership functions of fuzzy controller
根据经典的Macvicar-Whelan模糊控制规则矩阵,模糊控制器的模糊规则表设计如表1所示。
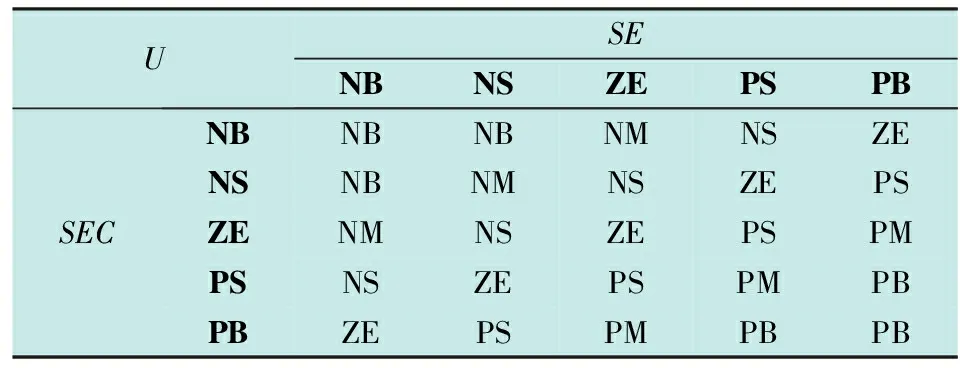
表1 模糊控制器的模糊规则表
对如上设计的模糊控制器采用积-和模糊推理方法,并按重心法实现输出量清晰化,则根据文献[8]的推导可知,对于输出量u有如下关系式成立
u(k)=A+Pkee(k)+Dkece(k)
。
(9)
根据输出u的成分,可以看出这是一种参数时变的PD型模糊控制器,其中,A,P和D为时变的参数,因此ke,kec与u并非简单的比例关系。然后在输出量u后分别引入比例因子α,β进行缩放和积分运算,最后输出量uc为
(10)
将式(6)代入式(7)可得

。
(11)
根据式(8)分析可知,输出量中包含了经典PID控制中的比例、积分和微分成分,其系数分别为比例项(αkeP+βkecD)、积分项(βkep)和微分项(αkecD)。
2.2 改进的模糊控制器结构与自整定算法
本文分别对模糊控制器的量化因子ke,kec进行模糊整定器设计,在保持了较小超调量的特性基础上,改进了如下性能:1)更小的上升时间;2)更快的过渡时间;3)改善系统抗干扰的能力。改进的控制器结构如图4所示,图中,Fuzzy Tunner1(FT1)和Fuzzy Tunner2(FT2)分别为ke和kec的模糊整定器。本文设计的量化因子的自整定算法为
(12)
式中:Δke(k),Δkec(k)分别为两个量化因子模糊整定器FT1和FT2在k时刻的输出值,两者的值域都设计为(-1,1);a,b分别为两个模糊整定器输出量的比例因子;ke0,kec0分别为量化因子和比例因子的初值;ke(k),kec(k)分别为系统k时刻的量化因子的值。
分析可知对于实际的输入量e和ec,在经过模糊整定器FT1和FT2以及自整定算法处理后,其模糊论域变为[-1/ke(k),1/ke(k)]以及[-1/kec(k),1/kec(k)]。即当量化因子进行在线调整时,会导致实际输入量e和ec发生伸缩变换,其伸缩变换量与Δke(k),Δkec(k)以及比例因子a,b有关,因此改进方法本质上也是一种实时变论域PID型模糊控制器。
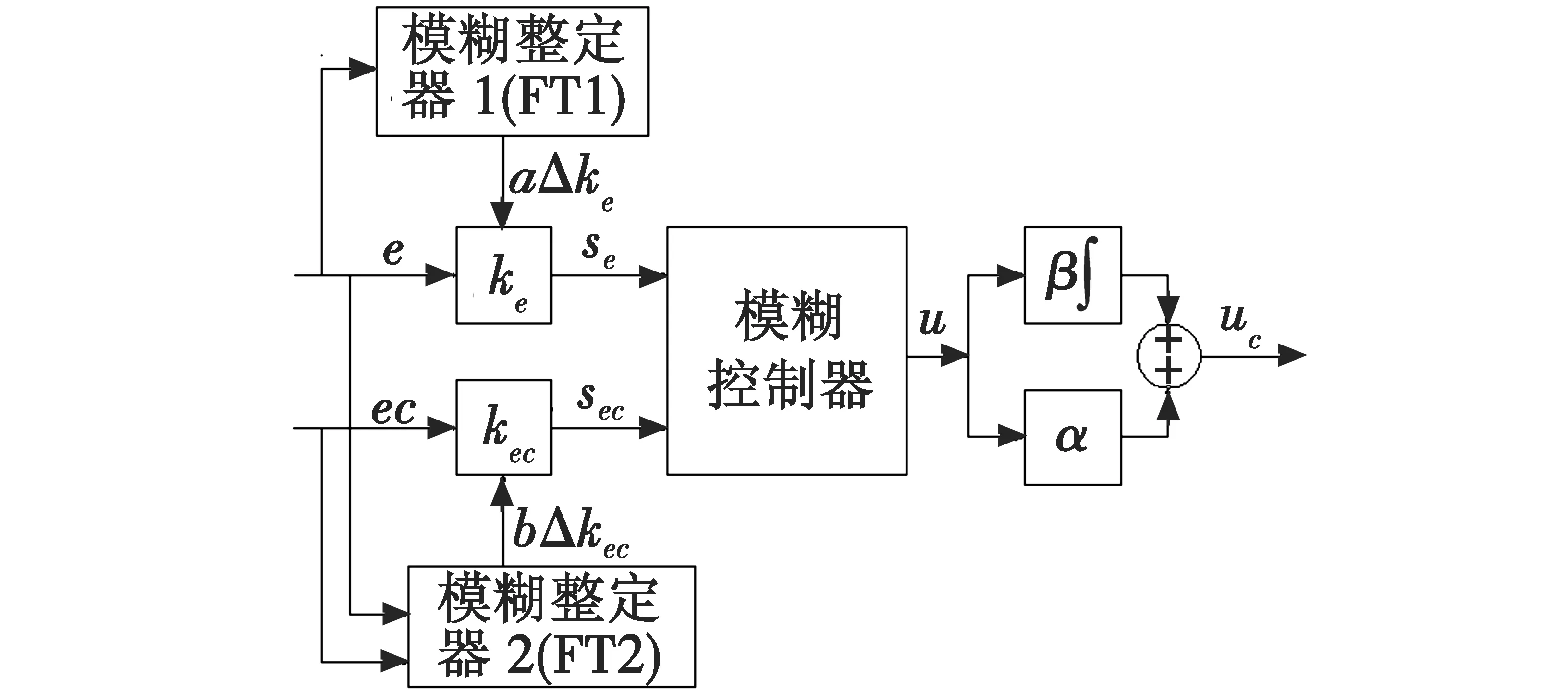
图4 量化因子自整定PID型模糊控制器Fig.4 PID-type fuzzy controller with self-tuning quantization factors
2.3 量化因子模糊整定器设计
对于某个二维输入(e,ec),根据表1分析可知ke,kec与u之间具有如表2所示的模糊逻辑关系。
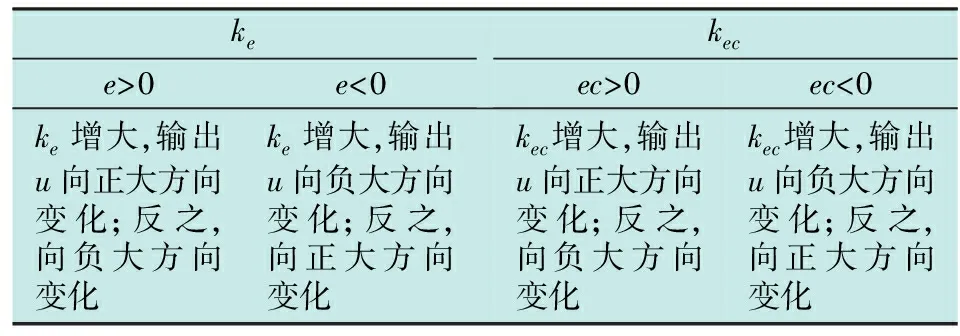
表2 量化因子与输出 u的模糊逻辑关系
根据表2分析可知,ke的整定主要与e的正负有关,因此设计ke的模糊整定器FT1为一维输入一维输出,输入输出分别为误差e和Δke;而kec的整定主要与ec的正负有关,但是考虑到e的大小对于kec的整定也十分重要,因此设计kec的模糊整定器FT2为二维输入一维输出,输入选择误差的e和误差变化率ec,输出为Δkec。
对e在论域[-1,1]上进行模糊化,使用7个模糊语言值,用E1和E2表示;对ec在论域[-1,1]上进行模糊化,使用2个模糊语言值,用EC表示;对Δke和Δkec在论域[-1,1]上进行模糊化,使用5个模糊语言值,用KE和KEC表示。具体表示如下

(13)
式中:模糊语言值NB,NM,NS,ZE,PS,PM,PB,N,P分别表示负大、负中、负小、零、正小、正中、正大、负、正。e1,Δke,e2,ec和Δkec相应的隶属度函数分布如图5所示。

图5 模糊整定器隶属度函数分布Fig.5 Membership functions of fuzzy tuners
为了缩短过渡时间、避免过大超调量以及减少振荡,模糊整定器FT1和FT2基本的模糊推理规则设计原则如下。
在系统响应初始阶段(误差较大),为了减少过渡时间,分别调节ke和kec加强误差对增大响应速度的作用以及减小误差变化率对响应速度的抑制作用,从而使控制器输出保持较大值(正大或负大),加速系统响应接近输入期望值的速度;在系统响应接近阶段(误差变小),为了避免出现超调甚至发散,分别调节ke和kec减弱误差对增大响应速度的作用以及加强误差变化率对响应速度的抑制作用,从而使控制器输出迅速减小,加速抑制系统响应出现超调的趋势;在系统响应振荡阶段(误差在零点附近),分别微调ke和kec减小稳态误差以及抑制系统振荡。具体的模糊规则见表3。
FT1,FT2的模糊推理算法以及输出量清晰化算法选择与模糊控制器相同。
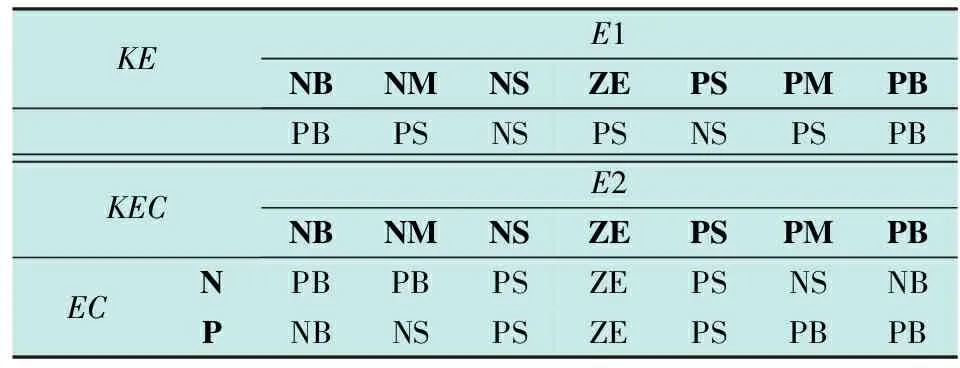
表3 Δke ,Δkec 模糊整定器模糊整定规则
3 姿态控制仿真实验


图6为两种控制方法姿态响应特性曲线。分析可知在0~8 s内,两种控制方法都能实现良好的姿态跟踪控制,并且超调量基本为零,但本文提出的改进方法在上升时间以及过渡时间方面都优于传统的PID型模糊控制器方法。而在8~15 s内由于引入了外界干扰力矩因素,飞行器的姿态出现了扰动和偏离,但可以看出改进控制器的抗干扰恢复速度更快且偏移量也更小。

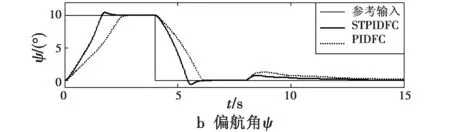

图6 各通道姿态角响应特性曲线Fig.6 Response curve of attitude angle for each channel
图7为采用本文改进控制器时,不同通道量化因子自整定的变化情况。分析可知,系统能够根据响应实时变化情况自动调整量化因子的大小,加快模糊控制器在不同响应阶段的控制强度,使各通道控制量的调整速度加快,从而实现更快的响应速度、更小的扰动偏移幅度以及更好的稳态精度。

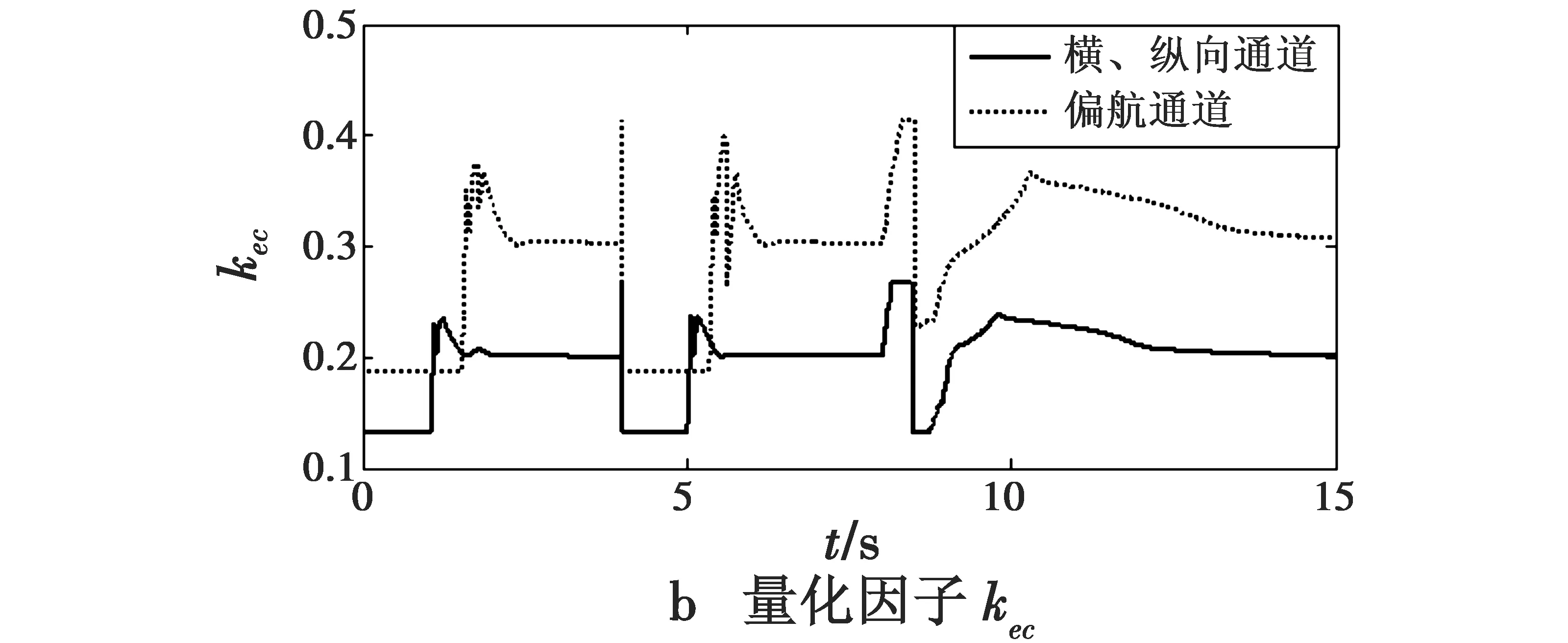
图7 量化因子模糊自整定曲线Fig.7 Fuzzy self-tuning curves of quantization factors
4 结束语
本文针对PID型模糊控制器实时优化问题,提出了一种量化因子自整定的变论域PID型模糊控制器。通过四旋翼飞行器姿态仿真实验,验证了本文改进方法是一种通过在线整定量化因子从而加强不同阶段控制作用强度的PID型模糊控制器。相比于设计三维模糊控制器,可以有效减少模糊规则数量,并降低系统设计难度;相比于传统模糊PID控制器,具有更好的动态跟踪控制效果以及系统鲁棒性。
[1] RIZOUG N.Adaptive neural network control based on neural observer for quadrotor unmanned aerial vehicle[J].Advanced Robotics,2014,28(17):1151-1164.
[2] ZHAO S,AN H,ZHANG D,et al.A new feedback linear-ization LQR control for attitude of quadrotor[C]//International Conference on Control Automation Robotics & Vision,IEEE,2014:1593-1597.
[3] BOUADI H,SIMOES CUNHA S,DROUIN A,et al.Adaptive sliding mode control for quadrotor attitude stabilization and altitude tracking[C]//IEEE 12th International Symposium on Computational Intelligence and Informatics (CINTI),2011:449-455.
[4] 胡包钢,应浩.模糊PID控制技术研究发展回顾及其面临的若干重要问题[J].自动化学报,2001,27(4):567-584.
[5] MANN G I,HU B G,GOSINE R G.Analysis of direct action fuzzy PID controller structures[J].IEEE Transactions on Systems Man & Cybernetics,Part B Cybernetics,A Publication of the IEEE Systems Man & Cybernetics Society, 1999,29(3):371-388.
[6] FILIP I,SZEIDERT I.Adaptive fuzzy PI controller with shifted control singletons[J].Expert Systems with Applications,2016,54(3):1-12.
[7] WEI V S.A novel design of fuzzy PID controllers for dual-sensor cardiac pacemaker systems[J].Open Journal of Applied Biosensor,2013,2(2):29-38.
[8] WU Z Q,MIZUMOTO M.PID type fuzzy controller and parameters adaptive method[J].Fuzzy Sets & Systems, 1996,78(1):23-35.
[10] PAN I,DAS S,GUPTA A.Tuning of an optimal fuzzy PID controller with stochastic algorithms for networked control systems with random time delay[J].Isa Transactions,2011,50(1):28-36.
FuzzyPIDControlofQuadrotorAircraftwithSelf-TuningQuantizationFactors
GE Lin, WANG Hua
(School of Astronautics,Beihang University,Beijing 100191,China)
Based on the nonlinear flight control model of quadrotor aircraft,an improved method was proposed for self-tuning the coefficients of 2D direct-acting type fuzzy PID controllers.By analyzing the fuzzy logic relations between quantization factors and inputs/output of fuzzy logic controller,fuzzy logic tuners were designed separately for quantization factors,including the fuzzy inputs and fuzzy rules.A self-tuning algorithm was applied to implement on-line adjustment of the quantization factors.The simulation of attitude control of quadrotor aircraft was conducted by developing the dynamic model and analyzing the control channels.Comparing with the classical PID-type fuzzy logic controller,the proposed controller shows better performance on dynamic response speed and anti-interference capability.
quadrotor aircraft; attitude control; fuzzy PID control; quantization factor; self-tuning; fuzzy logic tuner
葛霖,王华.量化因子自整定的四旋翼飞行器模糊PID控制[J].电光与控制,2017,24(7):90-94.GE L,WANG H.Fuzzy PID control of quadrotor aircraft with self-tuning quantization factors[J].Electronics Optics & Control,2017,24(7):90-94.
TP273
A
10.3969/j.issn.1671-637X.2017.07.019
2016-07-08
2016-07-26
葛 霖(1992 —),男,湖南常德人,硕士,研究方向为飞行器控制和模糊控制等智能控制方法。 模糊PID控制技术作为模糊控制理论与经典PID控制理论的结合,对于许多复杂控制对象具有优良的控制效果。其中,直接控制量型(Direct-action)模糊PID控制器,作为模糊PID控制领域的主要类型之一[4],其输出量包含了PID原理范围内的控制作用量成分,MANN等[5]归纳了该类模糊控制的12种控制结构单元,可以组合成各种形式的PI/PD/PID型模糊控制器。虽然对于该类PID型模糊控制器已有较多研究和应用,但有关它的控制器优化调节[6]、模糊规则设计[7]等方面一直是此类控制器的研究热点。
猜你喜欢
科技创新与应用(2024年8期)2024-03-25 03:24:54
人民黄河(2023年9期)2023-09-12 04:24:26
电子设计工程(2022年15期)2022-08-17 10:07:16
商品与质量(2020年38期)2020-11-06 06:50:08
光通信研究(2020年2期)2020-06-15 07:42:58
当代水产(2020年2期)2020-03-17 06:57:06
中国保健营养(2019年1期)2019-10-21 09:54:49
科技创新与应用(2019年17期)2019-06-09 08:38:29
机械制造文摘(焊接分册)(2014年4期)2014-03-20 13:57:40
河北医科大学学报(2011年9期)2011-03-25 10:17:14
