
基于法向偏差的隧道点云去噪算法
2018-01-09 06:02蓝秋萍田青红李子宽
测绘工程 2018年1期
邓 辉,蓝秋萍,廖 威,田青红,李子宽
(1.河海大学 地球科学与工程学院,江苏 南京 210098;2.宁波市规划设计研究院,浙江 宁波 315042)
基于法向偏差的隧道点云去噪算法
邓 辉1,蓝秋萍1,廖 威2,田青红1,李子宽1
(1.河海大学 地球科学与工程学院,江苏 南京 210098;2.宁波市规划设计研究院,浙江 宁波 315042)
针对隧道类似圆柱的形态特征以及三维点云法向对噪声的敏感性,设计一种剔除由通行车辆和隧道内壁悬挂物所造成噪声点的方法。该方法利用点云的大量法向量鲁棒地估计出精确的隧道轴向,并根据点云法向与隧道轴向的偏差识别出可靠的隧道表面点,然后参照可靠点完成噪声点的进一步确认。利用仿真数据和真实的高速公路隧道扫描点云实验结果证明该方法的有效性和精确性。
三维激光扫描;隧道中轴;法向偏差;点云去噪;高斯映射
隧道作为贯穿山体、河流的交通工程,在高速公路交通系统中发挥着重要作用。隧道内部空间狭小、照明条件差等因素给隧道测量造成一定困难。三维激光扫描技术作为一种新型测绘技术具有无需光照、非接触测量、自动化程度高、可实现全断面信息采集和作业周期短等优势,被广泛应用于隧道测量。实际测量过程中,受扫描仪固定设站工作模式以及现场复杂环境影响,采集的隧道点云数据中不可避免地带有噪声点。

图1 隧道点云分布
图1为一段隧道点云分布图,根据噪声点空间分布情况大致可将其分为两类:①通行车辆和行人等移动目标造成的离群点,通常空间分布稀疏且距离隧道壁较远;②隧道顶灯和管线等设施造成的附属物噪声点,其空间分布具有较高的局部空间密度且距离隧道壁较近。
当前针对隧道点云去噪方法研究成果:程效军[1]等采用双向投影获取隧道中轴线,根据圆形隧道表面点到中轴线距离剔除噪声点。同样是基于中轴线的去噪算法,琚俏俏等[2]沿轴线方向提取隧道点云切片,对切片点作椭圆拟合识别其中噪声点。托雷等[3]在利用中轴线截取隧道断面后,对断面使用基于圆型模型的RANSAC算法剔除噪声。徐光华等[4]提出了基于隧道设计半径的粗去噪和多项式拟合的精确去噪相结合的去噪方法。李嘉[5]等根据邻域内点到扫描仪中心点的深度值异常识别出其中离群点,并以深度值的期望值修复离群点。余鹏磊[6]等基于RANSAC算法在隧道壁上选取种子点,利用区域生长方法从点云数据中提取隧道内表面点,实现噪声点的剔除。
综上所述, 目前隧道点云去噪方法均利用噪声点偏离采样表面所导致邻近点间距差异、相对中轴线距离差异和断面形态变化差异等特征实现噪声点剔除。文中以采样点偏离隧道表面垂直距离为噪声识别依据,认为偏离隧道表面越远的点噪声概率越高。文中提出一种两步法隧道点云去噪声方法。第一步:从扫描点云中提取可靠隧道表面点,作为隧道表面模型;第二步:计算剩余点到隧道内表面距离,回收剩余点中误判的隧道壁点。其中从扫描到云中分割出可靠隧道内表面点,是方法的关键。隧道具有类似于圆柱体的形状特征,中轴线方向与表面法向具有稳定的垂直关系。基于隧道的这种几何特征,计算点云法向量的垂线获取轴线方向。然后以点云法向量与轴线方向夹角的垂直偏差为依据将原始点云分割为可靠隧道内表面点云和待回收点云,如图2所示。
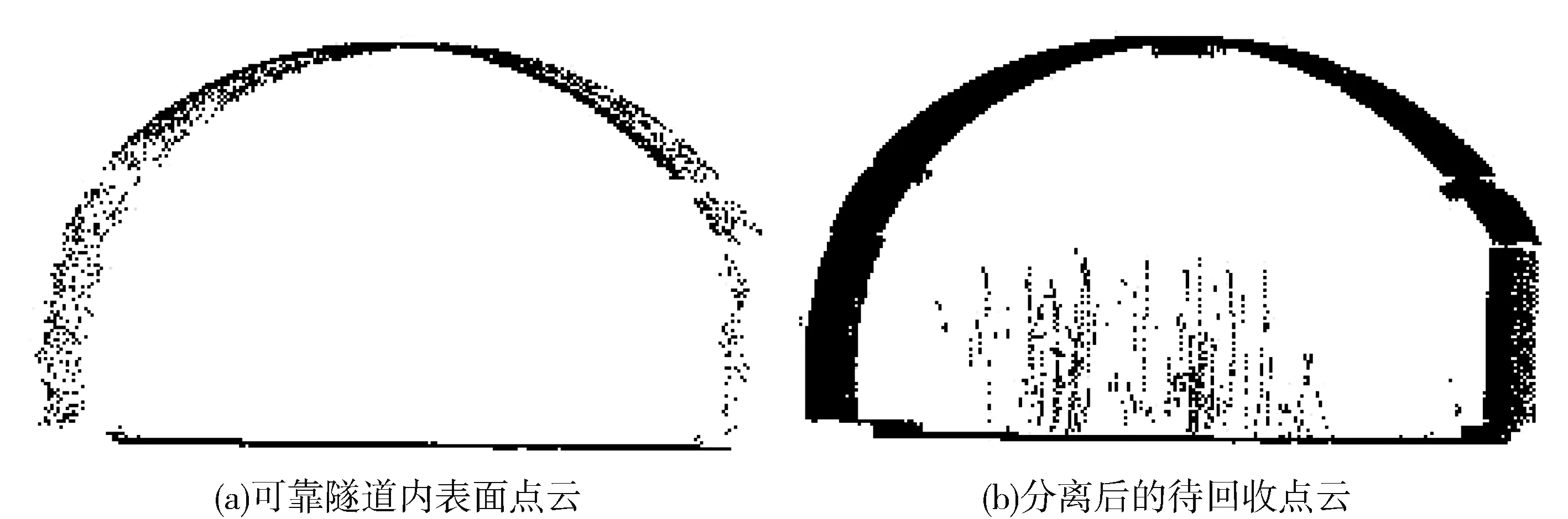
图2 基于轴线方向的可靠隧道壁点提取
1 去噪算法流程
1.1 识别可靠隧道内表面点
隧道设计过程中,为了综合考虑隧道内表面受力均匀、施工效率和地下交通运行安全,隧道走向变化会比较平缓。因此整段隧道点云能够分割为小段直隧道单独处理,每段直隧道的轴线方向利用法向量来确定。点云法向估计采用局部平面拟合的方法,该方法由Hoppe[7]等在基于有向距离函数(Signed Distance Function)表面重建算法中提出。理论上讲,两个非共线的法向确定轴线方向。由于法向估值存在误差,文中利用全部点的法向量来计算轴线方向。为了提高计算效率,采用高斯映射法[8]将单位法向量转化为高斯球面上映射点[9]。如图3所示,将高斯球球心固定在隧道中心点,并适当扩大球半径。从图中能够明显看出映射点集中分布于一个垂直于轴线的大圆平面附近,偏离平面较远的映射点十分稀疏。通过对映射点做主成分分析[10]得到其所在最小二乘意义上的平面模型,平面模型法向量就是轴线方向估值。结合球面模型中大圆平面一定过球心点的特点,大圆平面模型拟合具体步骤:
1)设立大圆平面方程。具体形式为
ax+by+cz=0.
(1)
其中,a,b,c满足条件:
a2+b2+c2=1.
(2)
2)计算法向量映射点到拟合平面距离。记点云集合法向量在高斯球面上映射点集合为G={g1,g2,…,gn},集合G中任意点xi,yi,zi到拟合平面距离di为
di=axi+byi+czi.
(3)
3)计算满足距离和最小条件下的方程参数。最小二乘意义上大圆平面模型满足映射点到拟合平面距离和最小:
(4)

图3 高斯映射点

2)法向量与轴线方向垂直残差Δv≤θ。说明点p为隧道壁点的概率较高,继续将其留在候选隧道壁点云集合P。
初始候选隧道壁点云集合P内点全部做完处理后,判断待回收点云集合Q中是否有新点加入。如果有新点被识别为可疑噪声点说明候选隧道壁点云中仍有可能包含噪声,重新估算最新候选隧道壁点云的法向量。继续判断最新候选隧道壁点云集合P中法向与轴线方向垂直残差,直到候选隧道点云不再发生变化时留下的点云集合就是可靠隧道内表面点云。
法向量是物体表面的一阶微分量,表面采样点中噪声含量对法向量估值影响较大。利用法向量偏差提取点云中可靠内表面点,能够保证最终留下点极大概率是位于隧道壁上。但该方法在得到可靠隧道内表面点云集合同时也有大量隧道壁点被误判为噪声点,因此需要从待回收点云Q中回收被误判的隧道壁点。
1.2 基于距离偏差的隧道壁点回收
点到隧道模型内表面距离值是判别采样点是否为隧道壁点的可靠依据。由于准确隧道模型无法提前获取,本文提出方法采用分离出的可靠内表面点云拟合隧道表面。当前基于点云的三维建模方法主要是构建三角网[11],以三角面片来逼近真实表面。利用三角构网拟合空间对象表面形态在点云密度高时比较精确。而且随着点云密度增加,模型表面会无限逼近真实表面。但是本文方法利用法向偏差从点云中分割出的隧道内表面点云十分稀疏,而且在隧道底面边缘等位置有较大空白区域。利用三角网拟合隧道表面计算点到隧道内表面距离估值在点密度低的区域有较大误差。为了计算待回收点q到隧道壁的垂直距离,首先寻找可靠内表面点云中局部切平面,以点q到切平面距离值判别其是否为隧道壁点。
假设待回收点云集合Q中点q∈{Q:q1,q2,q3,…,qm}为被误判的隧道壁点,则点q到最邻近隧道内表面的垂距d会较小,因此需要设定一个距离阈值dL来判别点q是否为隧道壁点。为了寻找距点q最近的隧道内表面切平面,预先设定邻域半径R,寻找可靠内表面点云集合P中与点q空间距离小于R的全部邻域点。然后对搜寻结果做以下判断:
1)点q在可靠内表面点云集合P中找不到三个邻域点无法构成一个平面。说明可靠内表面点云在点q邻域内十分稀疏,继续将点q视为待回收点。
2)点q在可靠内表面点集合P中找到超过两个非共线邻域点,并且点q到邻域点的拟合切平面距离值d小于阈值dL。表示点q有很大概率为误判的隧道壁点,将其从待回收点云集合Q移到可靠隧道内表面点云集合P。
3)点q在可靠内表面点集合P中找到超过两个非共线邻域点,但点q到邻域点所拟合切平面的距离值d大于阈值dL。这种情况暂时无法判断点q所属类型,继续将点q视为待回收点。
对待回收点云集合Q中全部点做完判断以后,能够得到了新可靠内表面点云集合P′和新待回收点云集合Q′。然后以新可靠内表面点云作为隧道内表面模型,继续判断新待回收点云Q′中误判的隧道壁点,直到待回收点云集合中识别不出隧道壁点时停止循环。最终可靠内表面点云就是去噪后的隧道壁点,而待回收点云集合Q′则分离出噪声。
本文方法所涉及的参数:角度阈值θ、距离阈值dL和邻域搜索半径R。当偏离隧道内表面大于点间隔就是噪声点,距离阈值dL设为扫描点云的平均点间距。邻域搜索半径R的选择应尽量确保邻域内可靠点构建的切平面与隧道表面局部几何形态一致,在本文实验中,该值与计算法向时的邻域半径取值相等。随后的实验在验证算法有效性的同时,还将分析角度阈值θ对去噪结果的影响。
2 实验与分析
为了验证方法的可行性和精确性,文中采用两组数据进行实验分析。一组为仿真隧道点云数据,通过模拟一段轴线方向已知隧道点云并人工添加噪声点来分析方法中轴线方向和去噪结果精度。另一组是在宁杭高速公路宜兴段梯子山隧道中利用三维激光扫描仪实际采集的点云数据,该数据被用来验证算法对真实扫描数据的有效性。
2.1 模拟点云数据分析
模拟隧道长度为10 m,高差为5 m,点间距为0.03 m,在模拟隧道中人工添加了距内表面较近的附属物噪声点和随机分布的离群点。结合隧道扫描点云真实特征,添加离群点和附属物噪声点按1∶10配比。为了评价噪声尺度,以噪声点与隧道壁点个数百分比作为噪声尺度因子。采用轴线方向估值和参考轴线方向夹角来评价轴向方向精度f(np,ref,np,est)=cos-1(np,ref,np,est),其中np,ref为轴线方向参考向量、np,est为轴线方向估计向量。结合模拟点云参数信息,设距离阈值dL=0.03 m、搜索邻域半径R=0.15 m。
噪声尺度对轴线方向估值的影响:如图4(a)所示,虽然随着噪声增加轴线方向估值偏差有轻微的上升趋势,但估值结果一直都十分精确。即使将噪声增加到25%,轴线方向偏差也仅有0.5°。由于实际扫面点云的噪声比例会远小于25%,实验证明利用法向量确定轴线方向结果可靠。
角度阈值θ对实验结果的影响:如图4(b)所示,角度阈值增加对实验结果中噪声点和丢失的隧道壁点个数变化比值不同,误判的隧道壁点减少个数显著低于噪声点增加个数。为了保证去噪结果的精度,建议设角度阈值在区间(5°,20°)内。虽然该区间内损失的隧道壁点个数较多,但是相对于致密的点云而言几乎没有影响,同时还能保证提出的方法具有很强的去噪能力。

图4 模拟实验结果
2.2 实际点云数据分析
真实扫描隧道点云长度约5 m,点个数为25 699,点间距为0.03 m,如图1所示。实验中所采用的处理参数:角度阈值θ=10°,距离阈值dL=0.03 m,搜索半径R=0.15 m。文中提出的方法在隧道点回收的过程属于一种类似于区域生长的方法。如图5所示,可靠内表面点回收过程具有由高密度区域向周围逐渐扩散的趋势。
实验结果如图5(f)所示,观察隧道顶部和中部,可以看出,该方法不仅能有效剔除离群点,对于距隧道壁较近的隧道附属物噪声的剔除效果也较为理想。对于隧道底面边缘检修道位置处采样点几乎没有全部丢失问题。对比图5(a)中可靠内表面点分布并结合实际点云数据,由于路面两侧检修道比较狭窄且表面涂层的镜面反射作用强烈,采集点云非常稀疏,因此检修道平面上几乎难以得到任何可靠内表面点。但是,与检修道平面邻接的两个立面上总能回收大量点云,所以并不会对后期隧道点云建模与处理产生不良影响。

图5 隧道壁点的回收过程
3 结束语
基于三维点云法向量对噪声的敏感性,本文利用法向量与轴线方向角度偏差为依据识别隧道点云中可靠内表面点。同样由于法向量对噪声的敏感特性导致算法在保证可靠内表面点精度的同时会丢失大量隧道壁点,然后继续从剩余点云中回收被误判的隧道壁点,能有效恢复这些损失。点到隧道内表面距离作为判别待回收点云中隧道壁点的依据,很大程度上保证了识别结果精度。通过对模拟隧道点云数据进行实验分析,证明方法估算隧道轴线方向结果的可靠性。而且,实验中还对比不同角度阈值对实验结果的影响,给出一个可靠角度阈值选择区间。最后,利用真实隧道扫描数据逐步分析方法处理隧道点云过程中隧道点云的形态变化。实验证明文中方法可以有效识别出噪声点,为后期数据处理提供可靠数据源。
[1] 程效军, 贾东峰, 刘燕萍, 等. 基于中轴线的隧道点云去噪[J]. 同济大学学报(自然科学版), 2015, 48(8): 1239-1248.
[2] 琚俏俏, 程效军, 徐工. 基于椭圆拟合的隧道点云去噪方法[J]. 工程勘察, 2014, 42(9): 69-72.
[3] 托雷, 康志忠, 谢远成, 等. 利用三维点云数据的地铁隧道断面连续截取方法研究[J]. 武汉大学学报(信息科学版), 2013, 38(2): 171-175.
[4] 徐光华. 基于二次曲线拟合的隧道激光点云滤波方法及应用[J]. 测绘通报, 2015(5): 42-45,108.
[5] 李嘉,林欢,蓝秋萍, 等. 基于深度差的离群点识别与修正方法[J]. 测绘工程, 2014, 23(11): 1-6.
[6] 余鹏磊, 于海洋, 谢秋平, 等. 基于RANSANC算法的地铁隧道点云数据滤波[J]. 测绘工程, 2014, 23(8): 28-31.
[7] HOPPE H, DE R T, DUCHAMP T, et al. Surface reconstruction from unorganized points[C]// SIGGRAPH ’92. Proceedings of the 19th annual conference on Computer graphics and interactive techniques, New York: ACM, 1992: 71-78.
[8] CARMO M P D. Differential geometry of curves and surfaces[M]. Englewood Cliffs: Prentice Hall, 1976.
[9] 蓝秋萍, 洪超, 林欢, 等. 从三维点云中自动提取隧道几何特征线[J]. 测绘工程, 2015, 24(10): 1-4.
[10] 浮丹丹, 周绍光, 徐洋, 等. 基于主成分分析的点云平面拟合技术研究[J]. 测绘工程, 2014, 23(4): 20-23.
[11] 张帆, 黄先锋, 李德仁. 基于球面投影的单站地面激光扫描点云构网方法[J]. 测绘学报, 2009, 38(1): 48-54.
Tunnelpointcloudsdenoisingalgorithmbasedonnormaldeviation
DENG Hui1,LAN Qiuping1,LIAO Wei2,TIAN Qinghong1,LI Zikuan1
(1. School of Earth Science and Engineering, Hohai University, Nanjing 210098, China; 2. Ningbo Urban Planning&Design Institute, Ningbo 315042, China)
Considering the shape characteristics of tunnel similar to cylinder, this paper presents a method of eliminating the noises from tunnel laser scanned points caused by passing vehicles and tunnel attached facilities, which utilizes the fact that normal estimation of three-dimensional point clouds is sensitive to noise. This method accurately predicts the tunnel axis direction from the large volume of normal vectors so that reliable tunnel surface points can be identified according to their normal angles with the tunnel axis direction, and then based on the distances to the reliable data, noise points are progressively segmented out from the laser scanned raw data. The proposed method has been validated on both synthetic data and real point clouds scanning from a highway tunnel, and the experimental result demonstrates that it can effectively preserve the geometric details of tunnel surfaces while removing the two types of noises.
3D laser scanner; tunnel axial; normal deviation; point clouds denoising; gauss map
著录:邓辉,蓝秋萍,廖威,等.基于法向偏差的隧道点云去噪算法[J].测绘工程,2018,27(1):59-63.
10.19349/j.cnki.issn1006-7949.2018.01.012
2016-11-28
国家自然科学基金资助项目(41301406);江苏省自然科学基金资助项目(BK20130829)
邓 辉(1989-),男,硕士研究生.
P23
A
1006-7949(2018)01-0059-05
李铭娜]
猜你喜欢
陕西师范大学学报(自然科学版)(2022年3期)2022-06-07
装备制造技术(2020年11期)2021-01-26
房地产导刊(2020年12期)2021-01-14
房地产导刊(2020年12期)2021-01-14
吉林大学学报(理学版)(2020年3期)2020-05-29
中学生数理化·高三版(2019年1期)2019-07-03
福建质量管理(2019年6期)2019-04-02
自动化学报(2018年7期)2018-08-20
周口师范学院学报(2016年5期)2016-10-17
试题与研究·高考数学(2016年1期)2016-10-13
