
局部阴影下光伏阵列的三步MPPT算法
2018-01-09 09:12尹立敏吕莉莉
东北电力大学学报 2017年6期
尹立敏,吕莉莉,雷 钢,齐 敏
(东北电力大学 电气工程学院,吉林 吉林 132012)
局部阴影下光伏阵列的三步MPPT算法
尹立敏,吕莉莉,雷 钢,齐 敏
(东北电力大学 电气工程学院,吉林 吉林 132012)
在局部阴影的情况下,光伏阵列的P-V特性曲线呈现多峰值特点,传统的跟踪方法常常会受限于局部最大功率点而导致跟踪失效,而智能算法跟踪时间过长。因此,在两类算法研究的基础上,提出了基于扰动观察法和猫群算法结合的最大功率跟踪算法,该算法采用大步长扰动观察法缩小搜索范围;采用猫群算法进行全局搜索最优局部;采用步长逐次逼近的扰动观察法在最优局部内寻找最大功率点。该算法能准确快速地跟踪到全局最大功率点,分别与猫群算法和扰动观察法进行比较分析,验证该算法的有效性。
光伏阵列;局部阴影;猫群算法;最大功率跟踪算法
在环境污染和能源危机等问题[1-3]逐渐严重的情况下,太阳能作为绿色清洁能源逐渐得到广泛重视。太阳能最常见形式为光伏并网[4]发电,一般将光伏电池串并联构成光伏组件。但是,光伏发电最主要问题是发电效率低。因此,为解决这一问题就需要进行最大功率跟踪(Maximum Power Point Tracking,MPPT)。由于在局部阴影条件下的P-V特性曲线是多峰曲线,因此传统的MPPT[5-6]算法会陷入局部极值,无法进行全局跟踪MPP。虽然智能算法在多峰时能实现全局跟踪,但跟踪时间过长,会造成能量损失。
本文在研究多峰值的P-V曲线特点以及扰动观察法(P&O)和猫群算法(CSO)优缺点的基础上,提出一种基于P&O和CSO的三步MPPT算法[7-10]。该算法第一步采用P&O快速找到第一个峰的大概位置;第二步采用CSO算法[11-14]实现全局搜索,当找到最优局部时停止搜索,保留全局最优位置信息;第三步,在最优局部内用步长逐次逼近的P&O搜索全局MPP,这样可以节省时间,而且能保证搜索精度。该算法表现出了P&O的搜索快速性和CSO算法的全局搜索能力,实现了局部搜索和全局搜索的协调,大大提高了收敛速度和跟踪精度。
1 局部阴影下光伏阵列输出特性
下面将两个相同组件串联组成光伏阵列进行分析,得到在局部阴影下[12-13]对其输出特性的影响。假设PV2受到局部遮挡,此时PV1的开路电压和短路电流分别大于PV2。串联构成的光伏阵列,如图1所示。因为Isc1>Isc2,当阵列电流高于Isc2时,PV2会形成热斑效应,对组件造成损坏。因此,需将旁路二极管并联在每个光伏组件上。
串联光伏组件的I-V和P-V特性曲线,如图2所示。当阵列电流ipv
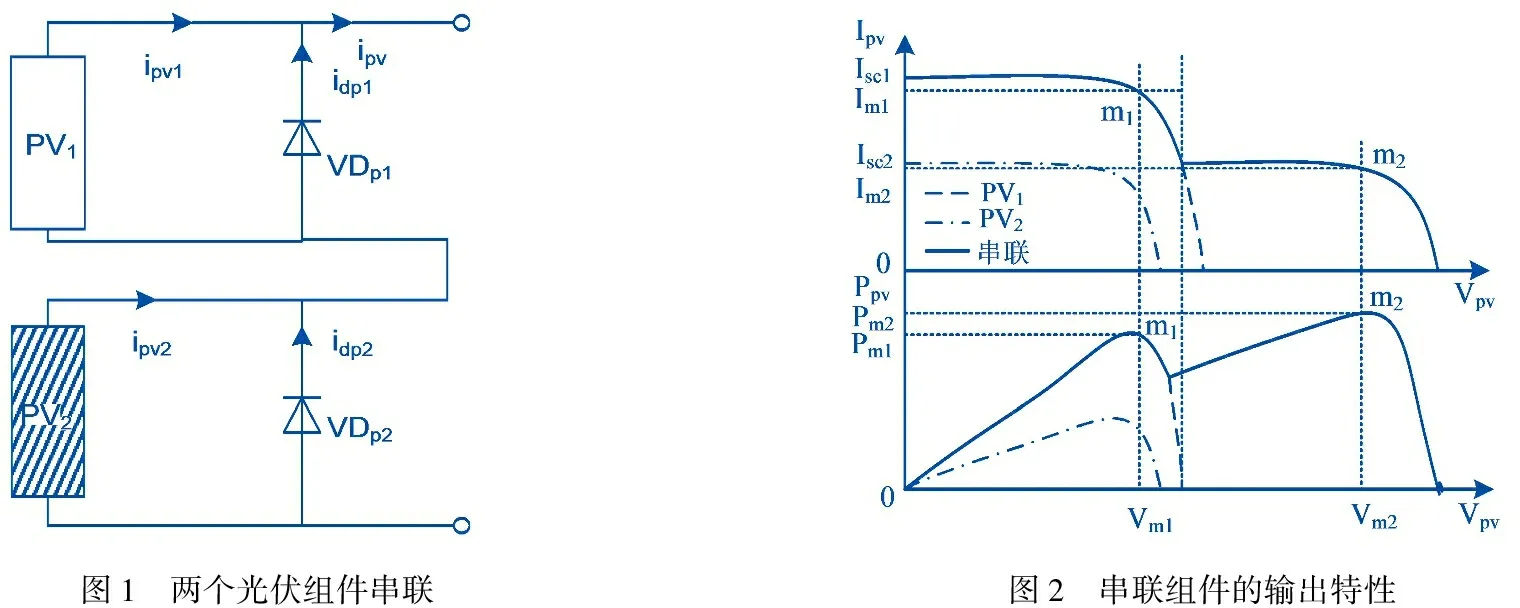
图1 两个光伏组件串联图2 串联组件的输出特性
在局部阴影下,光伏组件串联时,其P-V曲线会呈多峰特性,对全局MPP的跟踪造成影响[15-20]。这时传统跟踪算法会陷入局部功率峰值点,而这个峰值点未必是全局MPP,此时就需要全局搜索来确定全局MPP。
2 三步骤全局MPPT算法
2.1 扰动观察法(P&O)
P&O追踪时间短,是传统跟踪算法最常见的一种,其原理为
(1)
式中:ΔV为扰动电压,当ΔV值固定时,P&O能追踪到单峰曲线的最大值,但是会产生振荡。
2.2 猫群算法原理(CSO)
阵列输出电压用猫的位置xi来表示,阵列输出功率值用适应度来表示。将群体规模设为100只猫,引用分组率(MR)将两种模式交互,令MR为0.02,即100只猫中有2只猫是跟踪模式,其他是搜索模式。
(1)搜索模式
复制5份自身位置,记忆池(SMP)为5;执行变异算子,在原来的位置施加扰动,用新的位置替代原来的位置,更新SMP;计算SMP其他点的适应度值;执行选择算子,选择SMP中适应度值最高的点来代替当前猫的位置,对输出功率进行更新。
(2)跟踪模式
根据猫群目前搜索到的最优解xbest(t),每只猫的速度vi,对每只猫的速度进行更新,如公式(2),设跟踪次数为10。
vi(t+1)=vi(t)+c·rand·[xbest(t)-vi(t)],
(2)
式中:vi(t+1)为第i只猫更新后的速度;rand为[0,1]之间的值;c为常数。
第i只猫更新后的位置为xi(t+1)=xi(t)+vi(t+1),完成迭代后,比较两次迭代产生的最优解,对适应度值较高的猫进行记录,最后判断是否满足结束条件,若满足则输出最优解。
2.3 三步骤最大功率跟踪算法
步骤1:用大步长的P&O跟踪到首个局部峰值点,记录下该点功率Pm和电压Vm。
步骤2:用CSO算法实现全局搜索,直到搜索到最优局部时停止。寻优过程中,CSO算法对每只猫所处的模式,依次确定位置更新后每只猫的适应度值和最优位置,更新记录最优值。
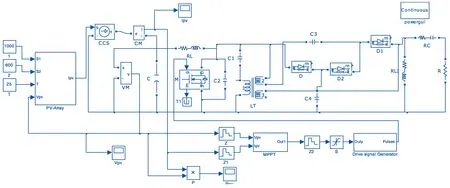
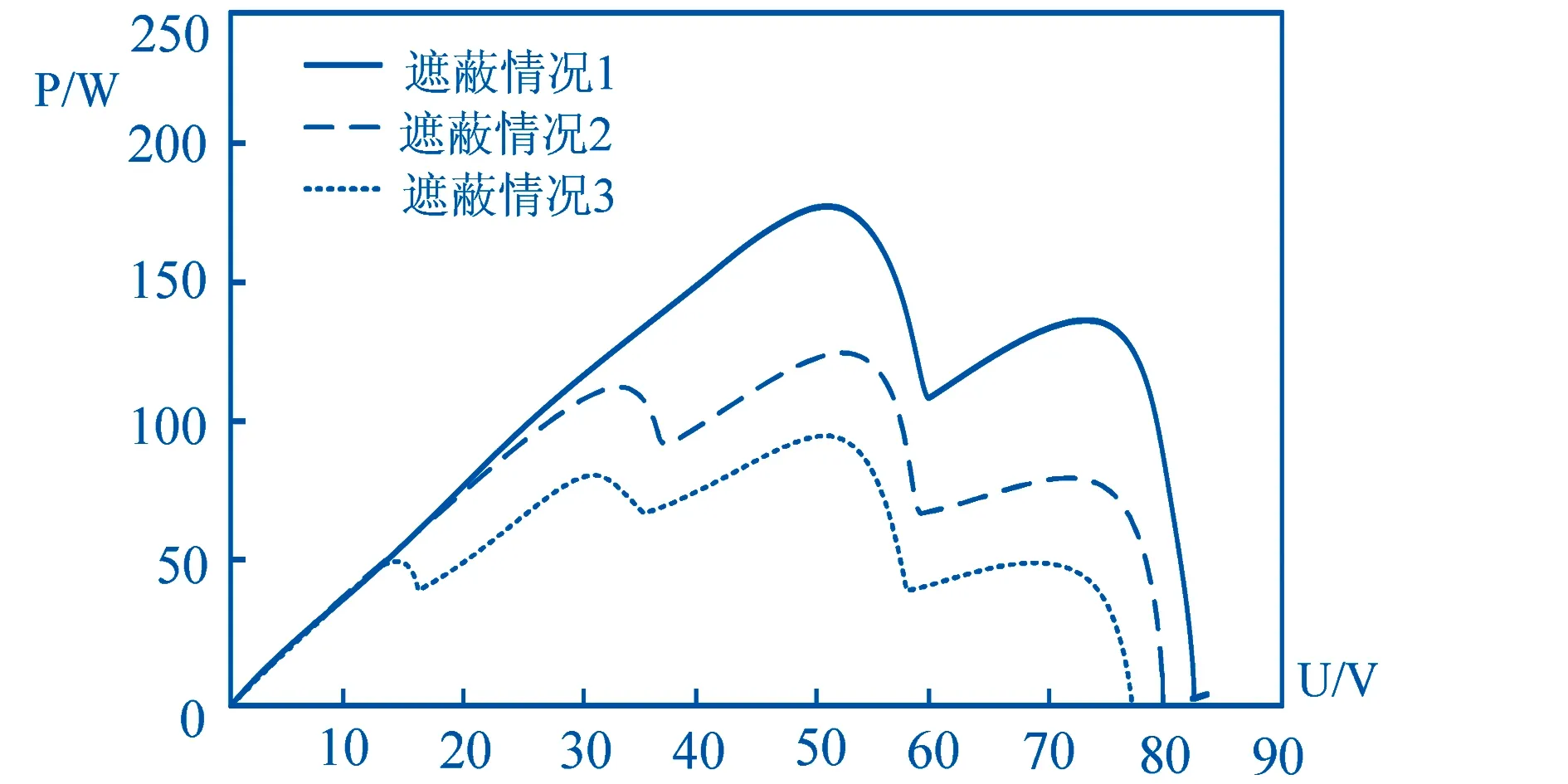
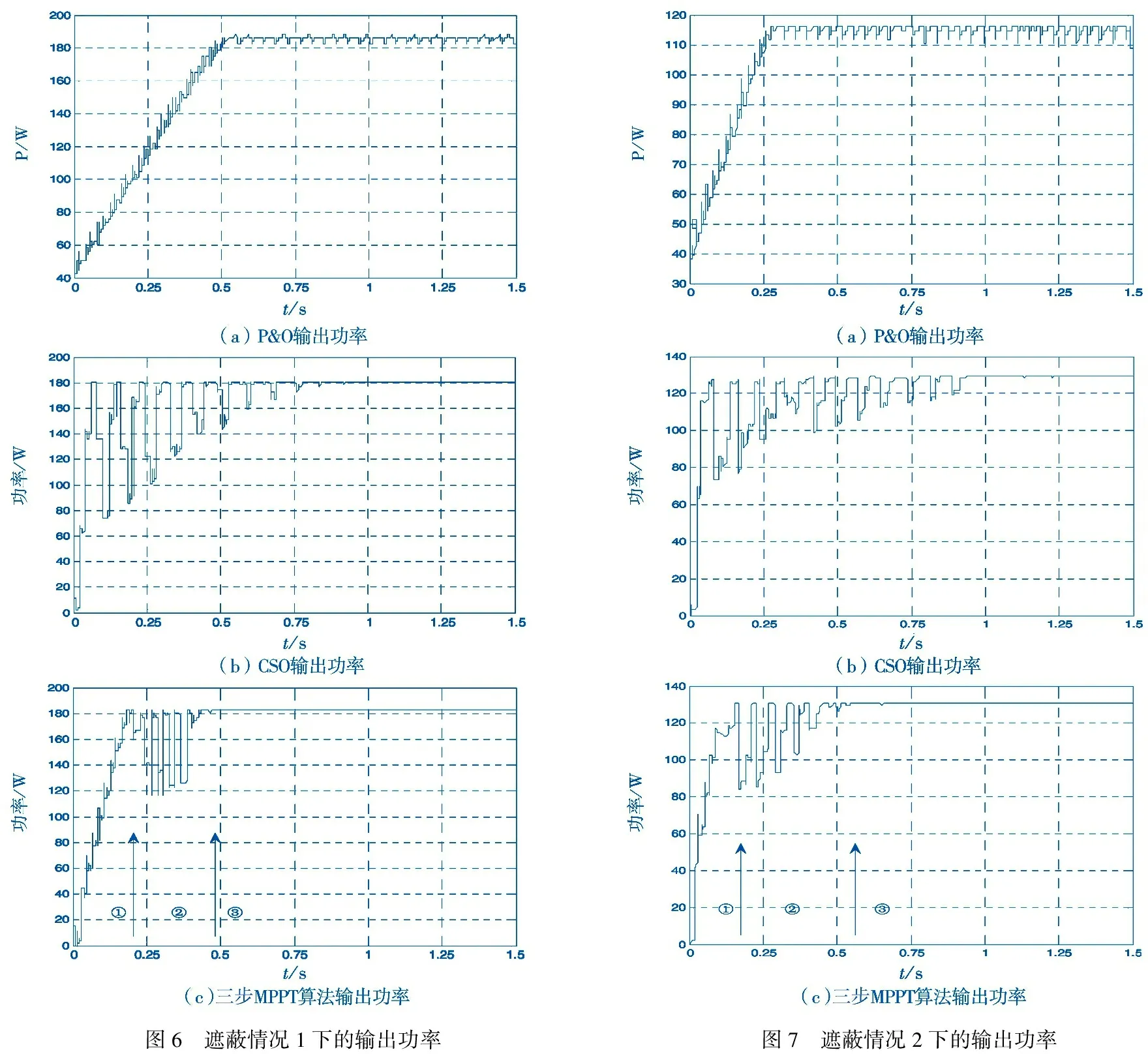
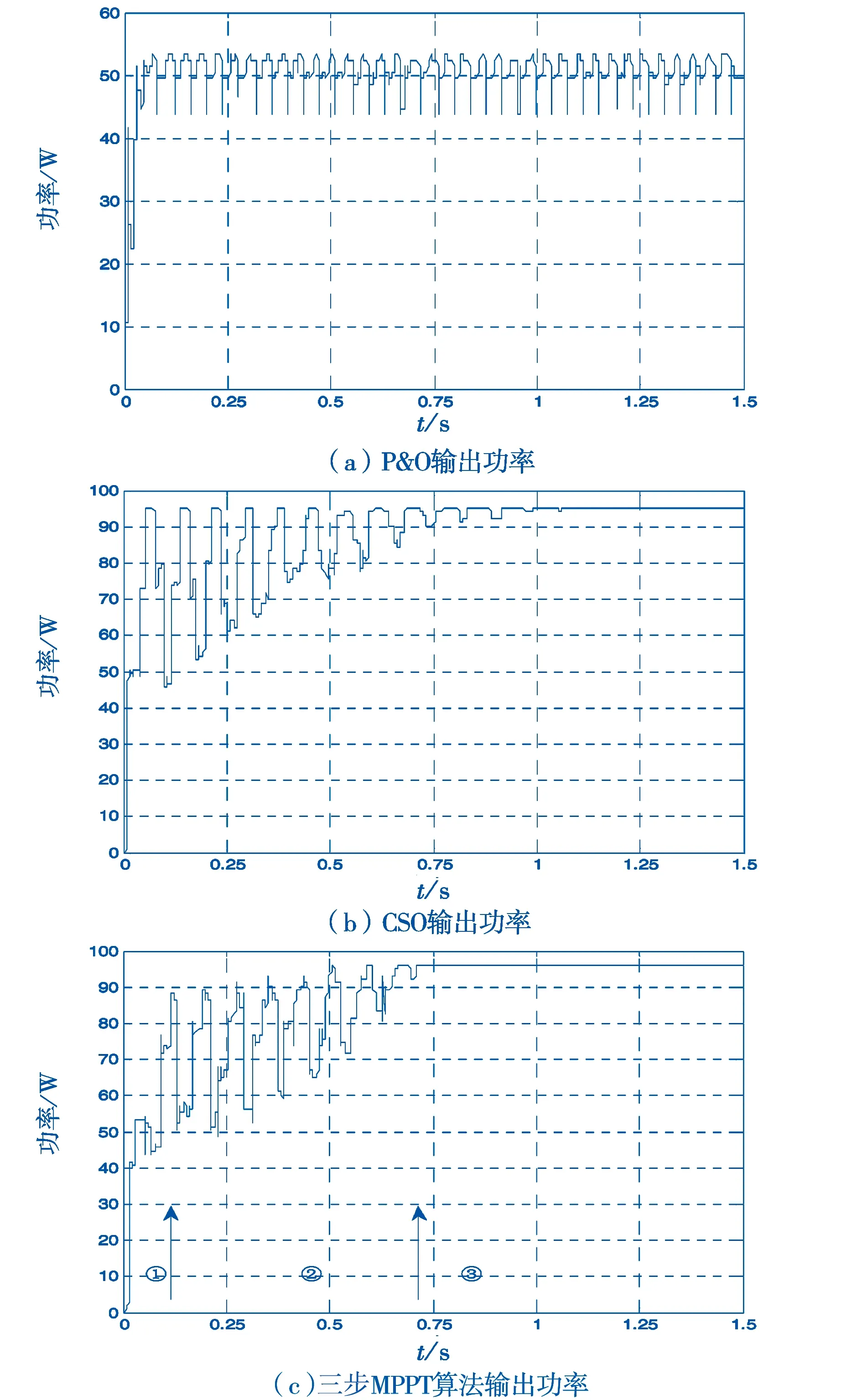
步骤3:采用步长逐次逼近的P&O将最优局部的最优解作为P&O的初始值,先以ΔUconst作为较小步长进行扰动;当Pt+1 图3 MPPT算法流程框图 图4 Simulink仿真模型 为验证三步MPPT算法有效性,现利用MATLAB/Simulink搭建仿真模型,对光伏阵列的多峰特性进行实验分析,仿真模型如图4所示。分析串联光伏阵列的多峰特性,本文提出三种光照方案,分别为遮蔽情况1、遮蔽情况2和遮蔽情况3。温度为25 ℃,四块光伏板A、B、C和D上的光照如表1所示。 表1 三种不同方案下的光照强度 图5 光伏阵列P-V曲线 当光伏阵列处在遮蔽情况下,本文分别采用P&O,CSO和MPPT算法对光伏组件在三种不同的遮蔽情况下进行MPPT。 在遮蔽情况1时,光伏板D被遮挡,其P-V曲线如图5所示,出现两个峰值。由图6(a)可看出,P&O追踪到了MPP,但振荡较明显,会造成大量能量损失;由图6(b)可看出,CSO大约需要0.79 s才能收敛;由图6(c)可看出,三步MPPT算法大约需要0.48 s,与CSO相比,追踪时间减少了0.31 s,且收敛后输出较平稳。 图6 遮蔽情况1下的输出功率图7 遮蔽情况2下的输出功率 图8 遮蔽情况3下的输出功率 在遮蔽情况2时,光伏板C和D被遮挡,其P-V曲线如图5所示,出现三个峰值。由图7(a)可以看出P&O陷入了输出功率为115.2 W的局部极值,而全局最优值为127.8 W,光伏系统输出功率为最大功率的90%,会造成一定的功率损失;由图7(b)可看以出CSO大约需0.92 s才能收敛;由图7(c)可以看出,三步MPPT算法仅需0.56 s就跟踪到了MPP,与CSO相比,追踪时间减少了0.36 s。 在遮蔽情况3时,光伏板B、C和D被遮挡,其P-V曲线如图5所示,出现四个峰值。由图8(a)可以看出,P&O陷入了输出功率为53.5 W的局部峰值,而全局最优值为95.1 W,光伏系统输出功率仅为最大功率的56.2%,也会造成一定的功率损失;由图8(b)可以看出,CSO大约需要1.09 s收敛;由图8(c)可以看出,三步MPPT算法大约需0.69 s,与CSO相比,追踪时间减少了0.4 s。 单独针对P&O进行比较可以看出,在遮蔽情况1下,虽然跟踪到MPP,但在MPP附近会发生振荡;在遮蔽情况2和遮蔽情况3下,P&O都会陷入局部最优值,会造成大量的能量损失,因此不具备追踪MPP的能力。同理比较CSO,在遮蔽情况1、遮蔽情况2和遮蔽情况3下,追踪时间分别为0.79 s、0.92 s和1.09 s。由此可以看出,在遮蔽情况下,随着峰的数目增多,CSO用时也越多。再对三步MPPT算法进行比较,在遮蔽情况1、遮蔽情况2和遮蔽情况3下,用时分别为0.48 s、0.56 s和0.69 s,可看出被遮蔽的比例越高,用时会大幅度增加。 在局部阴影条件下,光伏阵列的P-V特性曲线具有多峰特点,传统的MPPT方法很难跟踪到全局MPP,而已有的针对局部阴影下全局MPP跟踪的方法也都存在着太复杂以及跟踪精度低等缺点。本文通过对局部阴影下光伏阵列输出特性的特点进行分析,针对以往跟踪方法的不足而提出了一种MPPT算法。该算法主要由三个步骤组成,逐次完成各步骤操作,可以兼顾准确性和快速性地跟踪到全局MPP。为了证明该算法的有效性,本文给出了在三种不同遮蔽情况下MPPT的实验,并与直接的全局跟踪算法进行比较。实验结果表明,MPPT算法可以快速准确地跟踪到全局MPP,具备良好的动态搜索能力。 [1] 章激扬,李达,杨苹,等.光伏发电发展趋势分析[J].可再生能源,2014,32(2):127-132. [2] 赵争鸣,刘建政,孙晓英,等.太阳能光伏发电及其应用[M].北京:科学出版社,2006. [3] 冯垛生,宋金莲,赵慧,等.太阳能发电原理与应用[M].北京:人民邮电出版社,2007,20-32. [4] 李翠萍,曹璞佳,李军辉,等.大规模分布式光伏并网无功电压控制方法综述[J].东北电力大学学报,2017,37(2):82-88. [5] Shane Duryea,Syed IsIam,William Lawranee.A battery management system for stand-alone photovoltaic energy system[J].IEEE Industry Applications Magazine,2001,7(3):67-72. [6] 李坤.光伏发电系统最大功率跟踪控制的研究[J].电气自动化,2016,38(1):39-41. [7] 吴章玮.光伏发电系统最大功率点跟踪技术研究[J].黑龙江科技信息,2017(4):23-23. [8] 赵争鸣,陈剑,孙晓瑛.太阳能光伏发电最大功率点跟踪技术[M].北京:电子工业出版社,2012:21-26. [9] A.E.Mohamed,Zhao Zhengming.MPPT techniques for photovoltaic applications[J].Renewable and Sustainable Energy Reviews,2013,25(3):793-813. [10] 宋宇,刘华.光伏发电最大功率点跟踪方法及控制研究[J].电源技术,2016,40(6):1247-1250. [11] 王永弟,孙心宇.猫群优化算法的非线性模型参数估计[J].测绘科学,2015,40(9):158-162. [12] G.N.Kumar,M.S.Kalavathi.Cat swarm optimization for optimal placement of multiple UPFC’s in voltage stability enhancement under contingency[J].International Journal of Electrical Power & Energy Systems,2014,57(57):97-104. [13] Chu Shuchuan,P.W.Tsai,J.S.Pan.Cat swarm optimization[C]//Proceedings of the 9th Pacific Rim International Conference on Artificial Intelligence.Berlin:Springer Verlag,2006:854-858. [14] Shu An Chu,Pei Wei Tsai,Jeng Shyang Pan.Cat swarm optimization[C]//9th Pacific Rim International Conference on Artificial Intelligence.Berlin:SpringerVerlag,2006:854-858. [15] 胡义华,陈昊.阴影影响下最大功率点跟踪控制[J].中国电机工程学报,2012,32(9):14-26. [16] 董正杰,徐韬,胡海洋,等.局部阴影下光伏阵列最大功率跟踪系统的研究[J].电力电子技术,2016,50(4):44-47. [17] 聂晓华,赖家俊.局部阴影下光伏阵列全局最大功率点跟踪控制方法综述[J].电网技术,2014,38(12):3279-3285. [18] K.Ishaque,Z.Salam.A review of maximum power point tracking techniques of PV system for uniform insolation and partial shading condition[J].Renewable and Sustainable Energy Reviews,2013,19(1):475-488. [19] 贾林壮,陈侃,李国杰,等.局部阴影条件下光伏阵列MPPT算法研究[J].太阳能学报,2014,35(9):1614-1621. [20] 黄嘉斌.局部阴影下光伏阵列MPPT算法的研究[J].工业控制计算机,2017,30(3):140-141. MPPTAlgorithmofPhotovoltaicArraybyPartialShade YinLimin,LvLili,LeiGang,QiMin (Electrical Engineering College,Northeast Electric Power University,Jilin Jilin 132012) Multiple local maximums would be exhibited on the P-V characteristic curve of photovoltaic array,under partially shade.Conventional maximum power point tracking (MPPT)algorithms tend to get into local maximum,while the intelligent MPPT methods would spend much time in tracking.After studying two MPPT algorithms,a MPPT algorithm based on perturbation and observation(P&O)and cat swarm optimization(CSO)was proposed.This algorithm used P&O with large step to narrow the search range,used CSO to achieve global search and to find the global optimal local,and used approximation P&O to find the global MPP in the optimal local.This algorithm can track accurately and rapidly to the global MPP,comparing with CSO and P&O to verify the effectiveness of the new algorithm. Photovoltaic array;Partial shading;Cat swarm optimization;Three-step MPPT algorithm 2017-03-05 尹立敏(1978-),女,博士,副教授,主要研究方向:电力系统控制及稳定. 电子邮箱:Yinlimin66@163.com(尹立敏);1558523324@qq.com(吕莉莉);279605232@qq.com(雷钢);513269394@qq.com(齐敏) 1005-2992(2017)06-0015-06 TM615 A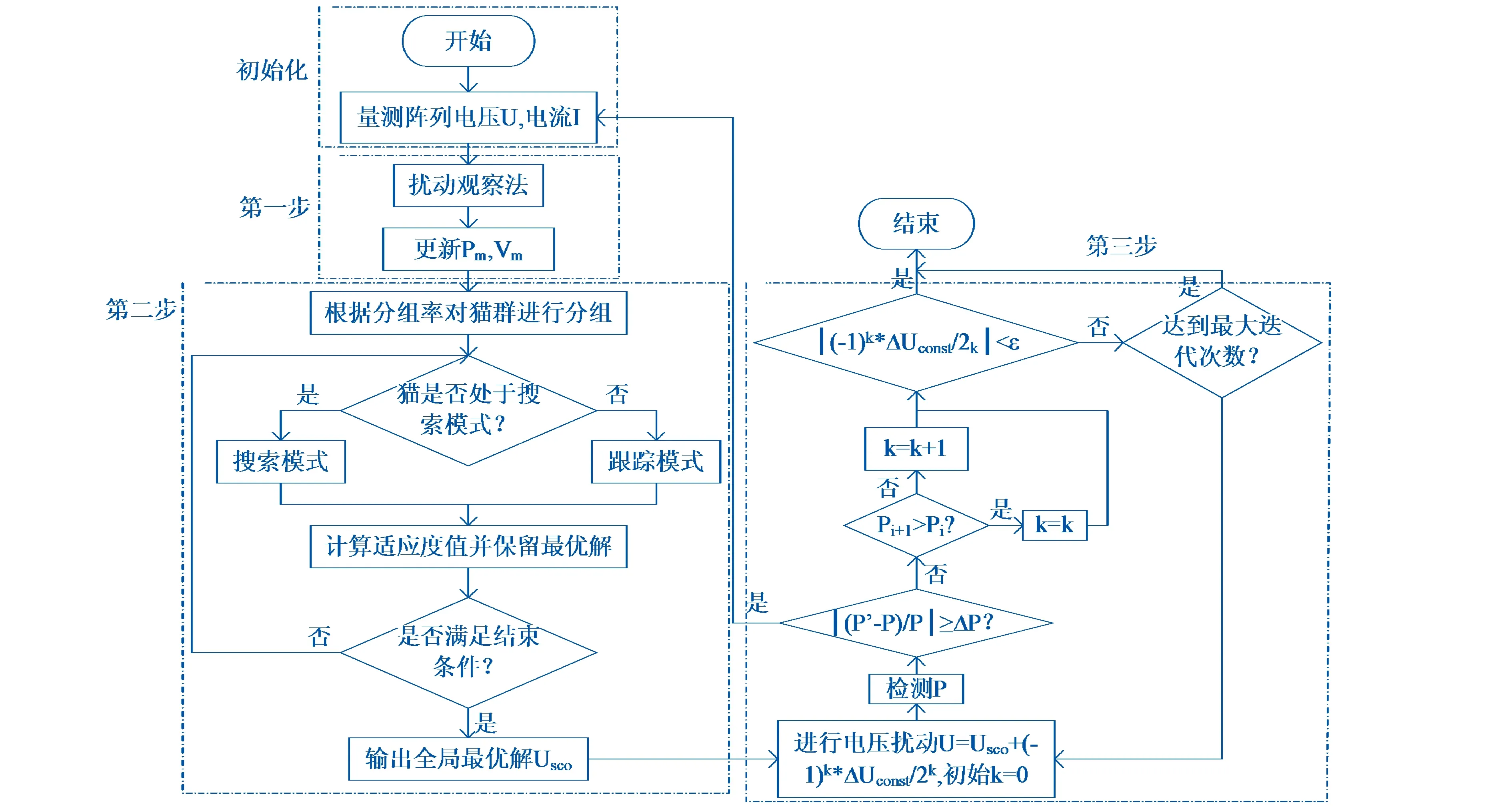
3 实验验证

4 结 论
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2022年2期)2022-04-26
太阳能(2022年2期)2022-03-07
文苑(2020年11期)2020-11-19
中国诗歌(2019年6期)2019-11-15
金桥(2018年4期)2018-09-26
中学生数理化·八年级物理人教版(2017年11期)2017-04-18
数学大王·中高年级(2016年4期)2016-05-14
中国学术期刊文摘(2016年2期)2016-02-13
中国卫生(2014年5期)2014-11-10
