一个类Lorenz混沌系统Hopf分岔反控制
2018-01-04 12:08张良唐驾时
振动工程学报 2018年5期
张良 唐驾时

摘要: 对混沌系统进行反控制可以实现分岔提前或者延迟发生,满足工程实际需要。以一个类Lorenz混沌系统为研究对象,根据Routh-Hurwitz准则和高维Hopf分岔理论,分析了系统Hopf分岔特性;提出了一种动态状态反馈控制法,对系统进行Hopf分岔反控制。通过调控控制参数,可以在预定任意位置产生Hopf分岔,使Hopf分岔提前或延迟发生,达到了预期的反控制目的。从分析结果看出,提出的动态状态反馈控制法可以避免复杂的计算过程,能够有效地实现对混沌系统的Hopf分岔反控制。
关键词: 非线性振动; 混沌系统; Routh-Hurwitz准则; Hopf分岔反控制; 动态状态反馈控制法
中图分类号: O322 文献标志码:A 文章编号1004-4523(2018)05-0752-07
DOI:10.16385/j.cnki.issn.1004-4523.2018.05.004
引 言
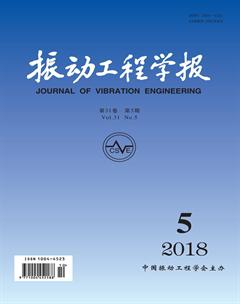
自1963年,E N Lorenz实验中偶然发现混沌吸引子,即Lorenz系统以来,对于混沌系统的认识和研究取得了极大的进步。现在人们不仅关注发现新的混沌系统,更关注系统自身混沌和分岔特性的研究。杨启贵等[1]提出了一个新的类Lorenz系统,分析了系统的规范型。Mello等[2]研究了一个三维类Lorenz系统的混沌吸引子,通过第一李雅普诺夫系数分析了系统的分岔特性。Li等[3]提出了一个新的类Lorenz混沌系统,分析了该系统的同宿轨道,以及系统在不同平衡点下的分岔特性。Shan Wang等[4]提出了一个五维类Lorenz系统,分析了系统分数阶分岔。
分岔控制与反控制已成为非线性动力学研究的重点方向之一。而分岔反控制是分岔控制的逆过程,其主要目的是通过控制系统參数,使系统在预先设置的临界值上出现预期的分岔现象,是产生分岔的过程,而不是避免或者消除[5-10]。
不少学者对分岔反控制做了研究,程尊水[11]采用Washout filter法对Chen系统进行Hopf分岔反控制,通过调控控制参数,可以实现在预定的临界值发生Hopf分岔;刘素华等[12]根据Hopf分岔理论,采用线性与非线性状态反馈法对四维Qi系统零平衡点处的Hopf分岔进行了反控制,分岔参数的不同,可以实现不同的反控制方案。Yu等[13]提出了一个新的反控制法,并以该控制法为基础,实现了一般自治系统的混沌化。伍新等[14]对三自由度含间隙双面碰撞振动系统的Poincaré映射叉式分岔进行反控制,通过对控制参数的调整,可以实现稳定的叉式分岔解。吴志强等[15]对Rssler 系统设置了非线性Washout控制器,对系统的Hopf分岔临界值、分岔类型以及极限环等进行了分岔控制。Zhang等[16]对一维Logistic映射设置了线性控制器,根据反馈控制法对系统二周期倍分岔点进行了反控制,实现了预期目的。
文献[17]提出了一种反馈控制方法,受控系统的平衡点与预设分岔临界值有关,具有一定的特殊性。以此为基础,本文提出了一种动态状态反馈控制法,不改变平衡点的情况下,可对系统进行Hopf分岔反控制。文中以文献[3]提出的三维自治类Lorenz系统为研究对象,根据Routh-Hurwitz准则和高维Hopf分岔理论,分析了系统的Hopf分岔特性,采用动态状态反馈控制法对系统进行Hopf分岔反控制,通过调控控制参数,实现了预设的Hopf分岔现象的发生,达到了反控制的目的。