考虑初始条件影响的移动荷载识别稀疏正则化方法
2018-01-04 12:08潘楚东余岭刘焕林
振动工程学报 2018年5期
关键词:桥梁
潘楚东 余岭 刘焕林

摘要: 利用桥梁实测响应反演桥面移动荷载是桥梁工程的研究热点之一。但既有移动荷载正则化识别方法没有考虑未知初始条件的影响。针对此问题,基于稀疏正则化技术提出了一种新的移动荷载识别方法。首先分别采用冗余字典与模态空间描述移动荷载与初始条件,计算各个荷载与初始条件分量引起的响应,归一化构造用于表达响应的像字典。然后利用像字典对响应进行稀疏分解,其结果即可用于估算未知移动荷载。最后采用数值仿真算例评价所提方法的可行性与有效性,并通过实验室搭建的车-桥系统模型对新方法进行实验验证。研究结果表明:未知初始条件下,所提方法能有效地识别移动荷载。
关键词: 移动荷载识别; 桥梁; 初始条件; 稀疏正则化; 稀疏分解
中图分类号: TU311.3; U441+.2 文献标志码:A 文章编号1004-4523(2018)05-0734-10
DOI:10.16385/j.cnki.issn.1004-4523.2018.05.002
引 言
桥梁移动荷载是桥梁主要活荷载之一,它影响着桥梁的运营安全与使用寿命。自上世纪90年代以来,有关移动荷载识别的研究受到广泛关注[1-2]。早期研究主要集中在数学模型的建立上,代表性的方法有第一识别法(IMⅠ),第二识别法(IMⅡ),时域法(TDM)与频-时域法(FTDM)。Yu和Chan对上述4种方法进行了比较,研究表明上述4种方法均能有效地识别移动荷载[3]。然而,由于移动荷载识别“逆问题”特点,因此直接求解容易受测量噪声的影响。
近廿年来,移动荷载识别研究得到进一步发展,主要表现为求解算法的多样性。Law与Zhu提出基于Tikhonov正则的移动荷载识别方法,旨在提高经典方法的抗噪性[4-5];Feng等结合贝叶斯正则化理论,研究移动荷载识别与结构参数估计[6-7]。以上工作可归类于基于正则化技术的动荷载识别研究[8-10]。正則化技术在求解时会引入荷载的合理约束,因此其识别结果具有较强的抗噪性。除了上述方法,研究人员针对不同工程模型简化条件,又提出了许多求解方法,例如:影响线法[11-12],将车轮接触力简化为移动常力;形函数法[13]利用少数已知基函数近似移动荷载;小波有限元法[14-15]采用小波有限元的车-桥系统模型。这些新方法的引入使得更准确识别移动荷载成为可能。此外,Cai所带领的研究团队在此阶段做了大量工作,提出了不少移动荷载识别新方法,对该领域的发展做出了重要贡献[16]。
一定程度上,既有方法能很好地识别移动荷载,但其理论通常是建立在结构初始条件已知的条件下,应用要求严格。实际工程中,由于车流、环境、桥墩连接方式等因素的影响,在车辆上桥前,结构通常处于振动状态。换言之,桥梁的初始条件是未知的。因此有必要研究未知初始条件下的移动荷载识别问题。
基于上述原因,结合稀疏正则化,本文提出了一种未知初始条件下移动荷载识别新方法。首先利用冗余字典展开未知移动荷载并采用模态空间表示未知初始条件。其次求解相关像字典,并利用像字典分解实测响应;最后利用响应分解结果估算移动荷载。同时,采用数值仿真与模型实验对所提方法的可行性与有效性进行验证。
1 基本理论
1.1 移动荷载作用下的测点响应 图1所示为移动荷载作用下的简支梁模型。
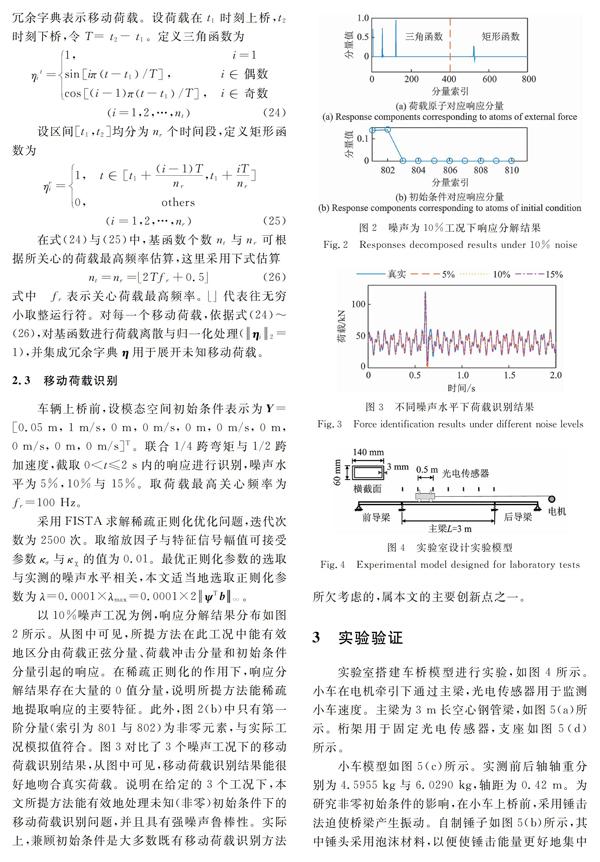
以10%噪声工况为例,响应分解结果分布如图2所示。从图中可见,所提方法在此工况中能有效地区分由荷载正弦分量、荷载冲击分量和初始条件分量引起的响应。在稀疏正则化的作用下,响应分解结果存在大量的0值分量,说明所提方法能稀疏地提取响应的主要特征。此外,图2(b)中只有第一阶分量(索引为801与802)为非零元素,与实际工况模拟值符合。图3对比了3个噪声工况下的移动荷载识别结果,从图中可见,移动荷载识别结果能很好地吻合真实荷载。说明在给定的3个工况下,本文所提方法能有效地处理未知(非零)初始条件下的移动荷载识别问题,并且具有强噪声鲁棒性。实际上,兼顾初始条件是大多数既有移动荷载识别方法所欠考虑的,属本文的主要创新点之一。
3 实验验证
实验室搭建车桥模型进行实验,如图4所示。小车在电机牵引下通过主梁,光电传感器用于监测小车速度。主梁为3 m长空心钢管梁,如图5(a)所示。桁架用于固定光电传感器,支座如图5(d)所示。
小车模型如图5(c)所示。实测前后轴轴重分别为4.5955 kg与6.0290 kg,轴距为0.42 m。为研究非零初始条件的影响,在小车上桥前,采用锤击法迫使桥梁产生振动。自制锤子如图5(b)所示,其中锤头采用泡沫材料,以便使锤击能量更好地集中在低频区段。实验锤击位置选取为距主梁左端支座2 m处。
在主梁底面中轴线的1/5,2/5,3/5,4/5与1/2跨处安装有应变片(120 Ω)。同时在1/4与1/2跨处安装加速度传感器(PCB,ICP 333B30)。利用LMS Test.Lab系统及其配套数采仪采集响应数据,设置采用频率为2048 Hz。
3.1 有限元模型
采用激振器激励对主梁进行实验模态分析。提取实测前4阶频率与振型。如图6所示,桥梁均分为20个4自由度梁单元。采用竖向弹簧支撑模拟实际支座。主梁实测线密度约为ρA=7.79116 kg/m。适当调节模型抗弯刚度EI与弹簧弹性系数kv,并最终确选为EI=1.4411×105 N·m2,kv=7.99×106 N·m-1。
表1对比了实测频率与模型计算频率;图7对比了实测振型与模型计算振型。从表1与图7可以看出,模型前4阶频率与振型均能很好地吻合主梁实测值。上述结果不能保证模型的高阶模态参数接近实际桥梁的高阶模态信息。但实际工程中,结构响应往往以低阶为主。因此,该有限元模型可用于移动荷载识别研究。分析时取前3阶模态参数,利用振型叠加法计算结构响应。时间间隔为(1/2048) s。
3.2 静力加载标定应变片
采用分级静力加载对应变片进行标定。加载所用砝码如图5(e)所示。表2列举了在0.5 m处分级加载工况下的实测应变值。其中弯矩增量的计算依据来源于结构力学基本理论。从表2可看出,在0.5 m处加载时,跨中处的弯矩与应变增量对为:(12.4950 N·m, 2.6983με)。依次更换加载位置(0.5 m,1 m,1.5 m,2 m,2.5 m),并对所有应变片实行上述分析过程。提取所有工况下的弯矩与应变增量对进行线性拟合,结果如图8所示。由图8易得,应变片灵敏度系数对应于图中直线斜率。
3.3 实验数据预分析
实验部分实测信号如图9所示。采用截止频率为200 Hz的Butterworth低通滤波器对结构响应进行滤波。提取从小车上桥到小车下桥所对应的响应进行后续识别分析。如表3所示,依据不同的车速与不同的锤击力度,本文共整理9组实验工况用于移动荷载识别。为了直观地了解锤击力度与初始条件大小的关系,图10对比了不同锤击力度下1/2跨测点的应变响应。从图10中不难发现,在车辆上桥前,实测应变幅值随锤击力度的加强而增大,符合实际工程经验。
3.4 验证新方法的正确性和有效性
以工况F-3为例,考虑荷载所关心的最高频率为200 Hz。采用1/5,2/5,3/5,4/5跨的弯矩响应联合1/4跨的加速度响应识别移动荷载。其余计算参数同数值仿真工况。
第一步:利用像字典对归一化响应进行稀疏分解,结果如图11所示。从图11可得,在稀疏正则化的作用下,信号分解结果存在较多的0值分量。实测信号包含有由简谐荷载、局部冲击荷载与非零初始条件引起的分量。
第二步:计算缩放因子与信号幅值参考值,结合式(7)与(21)估算移动荷载与结构初始条件,结果如图12所示。从图12(a)与(b)可以看出,前后轴识别结果的趋势项与真实轴重有较高的吻合度,說明所提方法在此工况中能有效地估算轴重。其次,前后轴识别结果的波动相对较大。其主要原因在于,实验室主梁与小车车轮均采用硬质材料,故在车速较快的情况下易产生较大的冲击。此外,从图中亦能看出除了少数有限个点的识别值小于0之外,绝大部分识别荷载值均在0值以上。该识别结果是比较合理的,因为荷载小于0意味着车轮与桥面之间存在拉力,不符合实际。图12(c)表明在车辆上桥时,结构初始条件不为0,即结构处于非静止状态。其主要原因是在车辆上桥前,主梁受到锤子冲击而产生明显的振动。
(27)式中 Wtrue表示真实车重,Widentified表示估算车重。这里Widentified的计算方法为:取位于时间区间[t0.5m, t2.5m]内前后轴识别结果和的平均值。其中t0.5m,t2.5m分别表示后轴位于主梁0.5 m时、前轴位于主梁2.5 m时所对应的时刻。图13给出工况F-3前后轴移动荷载识别结果之和。从图中可见,该工况下本文所提方法能有效地估算小车车重。图14对比了跨中实测响应与重构响应,其中重构响应采用上述移动荷载识别结果进行计算。从图中可见,跨中实测响应与重构响应具有较高的吻合度。该结果从响应方面间接地表明了识别结果的合理性。
3.5 不同初始条件的影响
下面以快速组工况为例,分析不同初始条件对识别结果的影响。以工况F-2为例,图15对比了考虑与不考虑初始条件下移动荷载识别结果。其中,不考虑初始条件意味着求解时删除系统矩阵中有关初始条件的列。从图15可得,除前轴前端部分之外,考虑与不考虑初始条件对识别结果影响不大。
进一步,以工况F-1,F-2与F-3为例,图16对比了考虑与不考虑初始条件下前轴移动荷载识别结果。从图16(a)中可以看出,当主梁没受到锤击时,识别精度不受初始条件的影响。因为相对车致响应,初始条件引起的响应足够小。从图16(b)与16(c)可以看出,当主梁受到锤击时,初始条件的影响不可忽略。为评估非零初始条件所带来的影响,取不考虑初始条件时识别结果的最大幅值与车重(104.12 N)的比值进行比较。从图中可粗略得知,3个工况的比值约为:工况F-1,1.0倍;工况F-2,1.5倍;工况F-3,4.0倍。由此可见,不同大小的初始条件对识别结果所带来的影响程度明显不同。
图17对比了初始条件识别结果。由图17可看出,初始条件主要以一阶为主,且幅值上基本呈现出F-1 3.6 不同车速下的计算效率
下面以工况F-3,M-3与S-3为例,讨论不同车速对计算效率的影响。所采用的计算环境为:台式计算机,4 CPU:Intel (R) Core(TM) i5-4590 @ 3.3 GHz,RAM:8G,Matlab version:R2015a。表4列出了计算详细的CPU耗时。从表4可看出,主要的CPU耗时发生在信号分解阶段。这是因为信号稀疏分解阶段需要大量的迭代运算,而荷载重构阶段不需要迭代运算。其次,表4表明在上述3个工况中,CPU耗时随着速度的下降而上升。主要是因为车速下降导致车辆过桥时间变长,进而使系统矩阵维数增大,影响计算效率。
3.7 所有工况识别精度对比
对所有工况进行移动荷载识别,并计算相应的识别车重、1/2跨实测与重建弯矩的相关系数、1/2跨实测与重建加速度的相关系数,并将结果记录在表5中。从表5可以看出,在所有9个工况下,所提新方法均能有效地识别小车车重;跨中实测响应与重建响应具有高相关性。上述结果从不同方面表明新方法能有效地处理含未知初始条件的移动荷载识别问题,比既有方法(只处理已知初始条件问题)更具一般性,应用条件更宽松。
4 结 论
针对既有移动荷载识别方法较少考虑未知初始条件影响的现状,本文提出了基于稀疏正则化的移动荷载识别新方法。该方法首先利用像字典对实测信号进行稀疏分解,然后利用稀疏分解结果估算移动荷载。采用数值仿真与模型实验共同验证所提方法的有效性,综合全文所得主要结论如下:
(1)基于稀疏正则化的移动荷载识别方法能有效处理未知初始条件下的移动荷载识别问题,更具有一般性。
(2)所提方法能有效地识别移动荷载与结构未知初始条件,亦能准确地估算移动小车车重,具有工程参考价值。
(3)在计算效率方面,所提方法计算耗时受小车车速影响较为显著。在估算小车车重方面,所提方法识别精度受小车速度影响不明显。
参考文献:
[1] 陈 敏. 桥上移动荷载识别问题的研究现状[J]. 北方交通,2008, (1): 126—127.
CHEN Min. Current situations of studying the distinguishing of moving load on bridge[J]. Northern Communications, 2008, (1): 126—127.
[2] Zhu X Q, Law S S. Recent developments in inverse problems of vehicle-bridge interaction dynamics[J]. Journal of Civil Structural Health Monitoring, 2016, 6(1): 107—128.
[3] Yu L, Chan T H T. Recent research on identification of moving loads on bridges[J]. Journal of Sound and Vibration, 2007, 305(1-2): 3—21.
[4] Law S S, Chan T H T, Zhu Q X, et al. Regularization in moving force identification[J]. Journal of Engineering Mechanics, 2001, 127(2): 136—148.
[5] Zhu X Q, Law S S. Moving loads identification through regularization[J]. Journal of Engineering Mechanics, 2002, 128(128), 989—1000.
[6] Sun H, Feng D, Liu Y, et al. Statistical regularization for identification of structural parameters and external loadings using state space models[J]. Computer-Aided Civil and Infrastructure Engineering, 2015, 30(11): 843—858.
[7] Feng D, Sun H, Feng M Q. Simultaneous identification of bridge structural parameters and vehicle loads[J]. Computers & Structures, 2015, 157: 76—88.
[8] 陳 震, 余 岭. 基于截断GSVD方法的桥梁移动荷载识别[J]. 振动与冲击, 2014, 33(10):97—100.
CHEN Zhen, YU Ling. Identification of dynamic axle loads on bridge based on truncated generalized singular value decomposition[J]. Journal of Vibration and Shock, 2014, 33(10):97—100.
[9] Bao Y Q, Li H, Chen Z C, et al. Sparse l1 optimization-based identification approach for the distribution of moving heavy vehicle loads on cable-stayed bridges[J]. Structural Control & Health Monitoring, 2016, 23(1):144—155.
[10] Pan C D, Yu L, Liu H L. Identification of moving vehicle forces on bridge structures via moving average Tikhonov regularization[J]. Smart Materials & Structures, 2017, 26: 085041.
[11] 钱长照, 陈昌萍. 利用弯矩影响线的移动荷载识别方法[J]. 动力学与控制学报, 2016, 14(2):182—185.
QIAN Changzhao, CHEN Changping. Method for moving force identification using bending moment influence line[J]. Journal of Dynamics and Control, 2016, 14(2):182—185.
[12] 王宁波, 任伟新, 李 苗. 基于影响线的桥梁移动荷载识别[J]. 振动与冲击, 2013, 32(3):129—133.
WANG Ning-bo, REN Wei-xin, LI Miao. Moving loads identification of bridge based on influence line[J]. Journal of Vibration and Shock, 2013, 32(3):129—133.
[13] 王 蕾, 侯吉林, 欧进萍. 基于荷载形函数的大跨桥梁结构移动荷载识别[J]. 计算力学学报, 2012, 29(02):153—158.
WANG Lei, HOU Ji-lin, OU Jin-ping. Moving force identification based on load shape function for a long-span bridge structure[J]. Chinese Journal of Computational Mechanics, 2012, 29(02):153—158.
[14] 尤 琼, 史治宇, 罗绍湘. 基于小波有限元的移动荷载识别[J]. 振动工程学报, 2010, 23(2):188—193.
YOU Qiong, SHI Zhi-yu, LAW Siu Seong. Moving force identification based on wavelet finite element method[J]. Journal of Vibration Engineering, 2010, 23(2):188—193.
[15] 修建权, 尤 琼, 史治宇. 基于小波有限元法的连续梁移动荷载识别[J]. 振动与冲击, 2012, 31(6):141—144.
XIU Jian-quan, YOU Qiong, SHI Zhi-yu. Moving force identification on continuous bridges with wavelet finite element method[J]. Journal of Vibration and Shock, 2012, 31(6):141—144.
[16] Yu Y, Cai C S, Deng L. State-of-the-art review on bridge weigh-in-motion technology[J]. Advances in Structural Engineering, 2016, 19(9): 1—17.
[17] Qiao B, Zhang X, Wang C, et al. Sparse regularization for force identification using dictionaries[J]. Journal of Sound and Vibration, 2016, 368:71—86.
[18] Pan C D, Yu L, Liu H L, et al. Moving force identification based on redundant concatenated dictionary and weighted l1-norm regularization[J]. Mechanical Systems & Signal Processing, 2018, 98:32—49.
[19] Beck A, Teboulle M. A Fast Iterative Shrinkage Thresholding Algorithm for Linear Inverse Problems[J]. Siam Journal on Imaging Sciences, 2009, 2(1):183—202.
Abstract: Moving force identification (MFI) from measured responses of bridges is a hot topic in bridge engineering. Current regularization-based MFI methods do not consider any influences from unknown initial conditions. In this study, a novel method is proposed for solving the MFI problem under unknown initial conditions based on sparse regularization. Firstly, the redundant dictionary and modal space are used for expressing moving forces and initial conditions, respectively. Responses induced by each component of moving forces and initial conditions are calculated and used for forming an image dictionary via normalization. The measured responses are decomposed by the image dictionary and then the decomposed results are used for estimating the moving forces. Finally, numerical simulations are used for assessing the accuracy and feasibility of the proposed method. A vehicle-bridge system model is then designed and fabricated in laboratory. A series of responses of a beam bridge subjected to moving vehicles are measured and used to verify the proposed method. The results show that the proposed method can identify the moving forces under unknown initial conditions.
Key words: moving force identification; bridge; initial conditions; sparse regularization; sparse decomposition
作者簡介: 潘楚东(1990—),男,博士研究生。电话:13427589181;E-mail:pan_cd@foxmail.com
通讯作者: 余 岭(1963—),男,教授。电话:(020)85220476转2012;E-mail:lyu1997@163.com
猜你喜欢
交通科技与管理(2022年8期)2022-05-07
公民导刊(2022年4期)2022-04-15
居业(2019年8期)2019-09-06
今日财富(2019年3期)2019-06-11
少儿科学周刊·儿童版(2019年4期)2019-05-15
湖南教育·A版(2019年4期)2019-05-10
科学与财富(2018年28期)2018-11-16
创新作文(1-2年级)(2017年10期)2018-04-16
理科考试研究·初中(2017年4期)2017-11-04