自动化监测系统在城市深基坑监测工程中的应用
2018-01-04 03:27:16王鹏王宇胡文奎林祥宏
城市勘测 2017年6期
王鹏,王宇,胡文奎,林祥宏
(济南市勘察测绘研究院,山东 济南 250101)
自动化监测系统在城市深基坑监测工程中的应用
王鹏*,王宇,胡文奎,林祥宏
(济南市勘察测绘研究院,山东 济南 250101)
基于传统监测方法在城市深基坑监测中存在的诸多困难,通过多种传感器融合的自动化监测系统,结合现场实际情况,研究了监测网的布网方式和测量方法,通过控制网平差和多期数据差分对监测数据进行改正处理。实现了监测数据的实时发布和报警。数据真实准确,及时可靠,对今后自动化监测系统在城市深基坑监测中的应用具有重要的借鉴意义。
自动化;动态监测;传感器融合;差分;发布和报警
1 引 言
随着我国经济发展和城市建设现代化水平的不断提高,城市深基坑项目越来越多,开挖深度及开挖面积越来越大,且往往位于人口密集、交通拥挤、地下管网密布的区域,周围常常有永久性建筑物,环境极其复杂[1~3]。一旦发生工程事故,就会给国家和人民的生命、财产安全造成损害。基坑工程可以通过监测和预警,及时发现安全隐患,保护基坑及周边建筑物的安全[4,5]。
传统的人工监测存在诸多问题,如监测较长、反馈速度慢、恶劣天气条件下不具备人工测量环境等。自动化监测系统能够弥补传统监测的诸多缺陷,其采用固定设站、增加观察频率的方式[6],利用软件平台对数据集成化处理,将基坑的水平位移监测、沉降监测、锚索轴力监测、深层水位监测集成一体,辅以远程控制系统,实施全天候 24 h动态监测[7,8]。本文以山东省省立医院儿科楼建筑基坑的自动化监测系统为例,展现自动化监测系统在深基坑监测中的应用情况。
2 自动化监测系统组成
自动化监测系统主要包括数据采集系统、数据分析系统、成果发布系统。其主要结构如图1所示。
数据采集系统由全站仪自动采集系统和数控自动采集系统组成。全站仪自动采集系统基于测量机器人实现了坡顶水平位移及竖向位移观测数据的自动采集。根据现场情况建立自动变形监测系统的永久观测房,并在观测房内放置Trimble S8全站仪和控制电脑。系统应用全站仪配套的Trimble 4D软件控制测量,功能模块包括测站设立、监测点初次测量、定期复测三部分。数控采集箱自动采集系统利用BGKLogger V4软件来控制锚索内力、深层水平位移及地下水位数据的采集,将采集数据实时传输到数据库,实现同步监测。
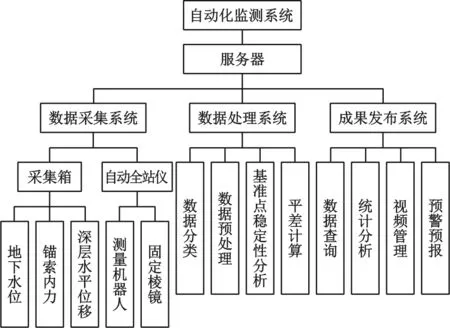
图1 自动化监测系统结构图
数据分析系统将自动化采集数据予以分类、处理、计算。Trimble 4D软件可以将采集的所有数据进行分类,用自带的软件分析系统进行粗差的剔除、基准点的稳定性分析和测量数据的平差计算,结果存贮到对应的SQL Server数据库。
成果发布系统包括数据查询、统计分析、视频管理及预警预报等模块。数据查询模块可对数据库内相应的数据进行调用,实现了监测数据的实时查询,统计分析,并且在数据变化量超过报警值时,预警预报模块向电脑网页及手机APP发布报警信息。视频管理模块作为监测系统的辅助,系统管理现场安置的所有摄像头,实时监控现场的施工情况,出现预警时能及时发现现场施工问题。
3 应用案例
上文提及的自动化监测系统成功应用于山东省省立医院儿科综合楼建筑基坑监测项目,该项目位于济南市内繁华地段,车流、人流量较大,各类市政管线密布,周边环境复杂。基坑东西方向长约 96.60 m,南北方向宽约 62.10 m,基坑开挖深度约为 21.0 m,是济南市为数不多的开挖深度突破 20 m的深基坑。基坑侧壁安全均按一级考虑。基坑支护形式为上部放坡,下部单排桩+预应力锚索支护形式。部分监测点被上部钢结构人行辅道遮挡,无法提供监测作业面,人工监测无法进行。鉴于此,采用自动化监测系统对该项目进行监测。监测内容包括:坡顶水平及竖向位移监测、周边建筑位移监测、周边道路位移监测、深层水平位移监测、锚索内力监测及地下水位监测等6项内容。
3.1 自动化监测网布设
省立医院儿科综合楼基坑周边高楼林立,作业空间狭窄,自动化监测网布设是否合理显得尤为重要[9]。
观测站布设在基坑南侧省立医院门诊楼楼顶处,垒筑强制观测墩。基坑监测平面控制点与水准控制点为共用点,布设在纬七路与经五路交口西侧、省立医院家属楼上、纬六路与经五路交口南北两侧居民楼上,监测网中布设3个固定棱镜作为基准点,由于基坑监测平面布置图图幅限制,故不能详细标注。
坡顶水平位移及竖向位移监测共用同一监测点,沿基坑边坡顶部布设,距离基坑开挖上口线约 30 cm,测点间距约 15 m,共计20个L型棱镜作为监测点;周边建筑物位移监测点采用植筋的方式在周边建筑物四角及沿建筑物外墙每 20 m处布设,共计16个监测点;周边道路位移监测采用击入界址钉的方式布设在纬七路和经五路道路两侧,共计6个监测点;深层水平位移监测断面沿基坑四周布设,断面间距约 25 m,每个监测断面不同深度处设置测斜传感器,共计82个测斜传感器;锚索内力监测断面沿基坑四周布设,断面间距约 25 m,每个监测断面不同深度处设置锚索传感器,共计46个锚索传感器;地下水位监测点沿基坑四周布设,监测点间距约 25 m,每个监测点安放渗压计,共计9个监测点。监测点分布图如图2所示。
测斜传感器、锚索传感器、渗压计均按照设计要求结合现场实际情况进行埋设,并用数据连接线与数据采集箱进行连接,从而,实现不同位置,不同深度的数据采集。
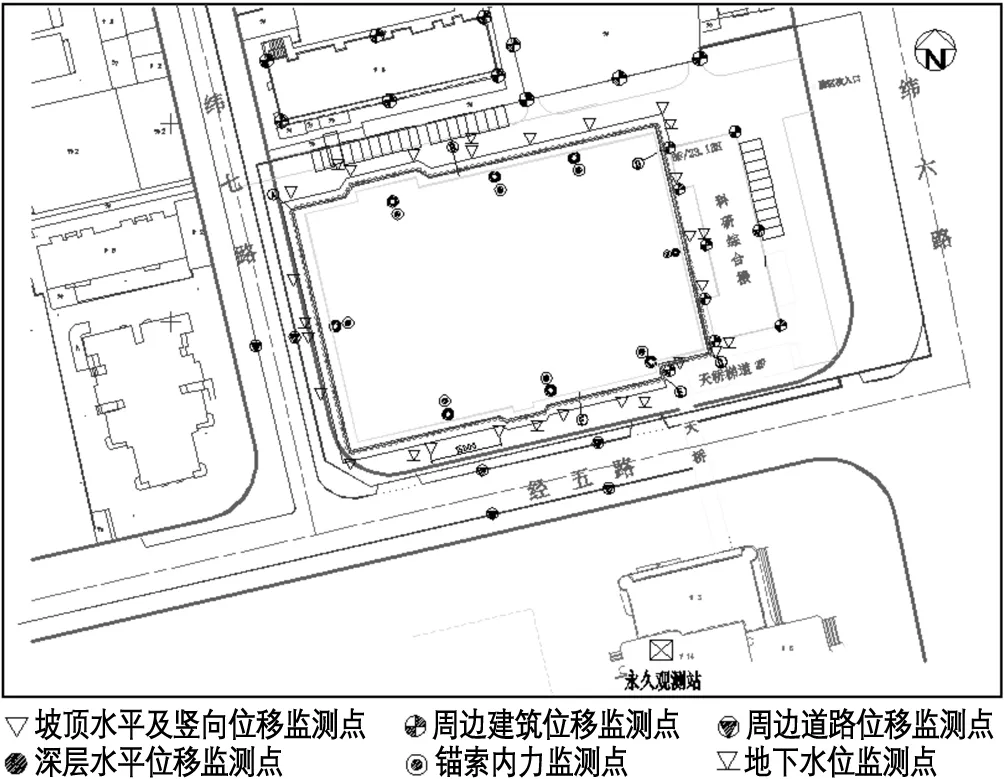
图2 监测点分布图
3.2 数据采集与处理
针对本项目布设的自动化监测网络和传感器,利用Trimble 4D监测平台和传感器数据采集箱对监测点及传感器数据进行实时采集。
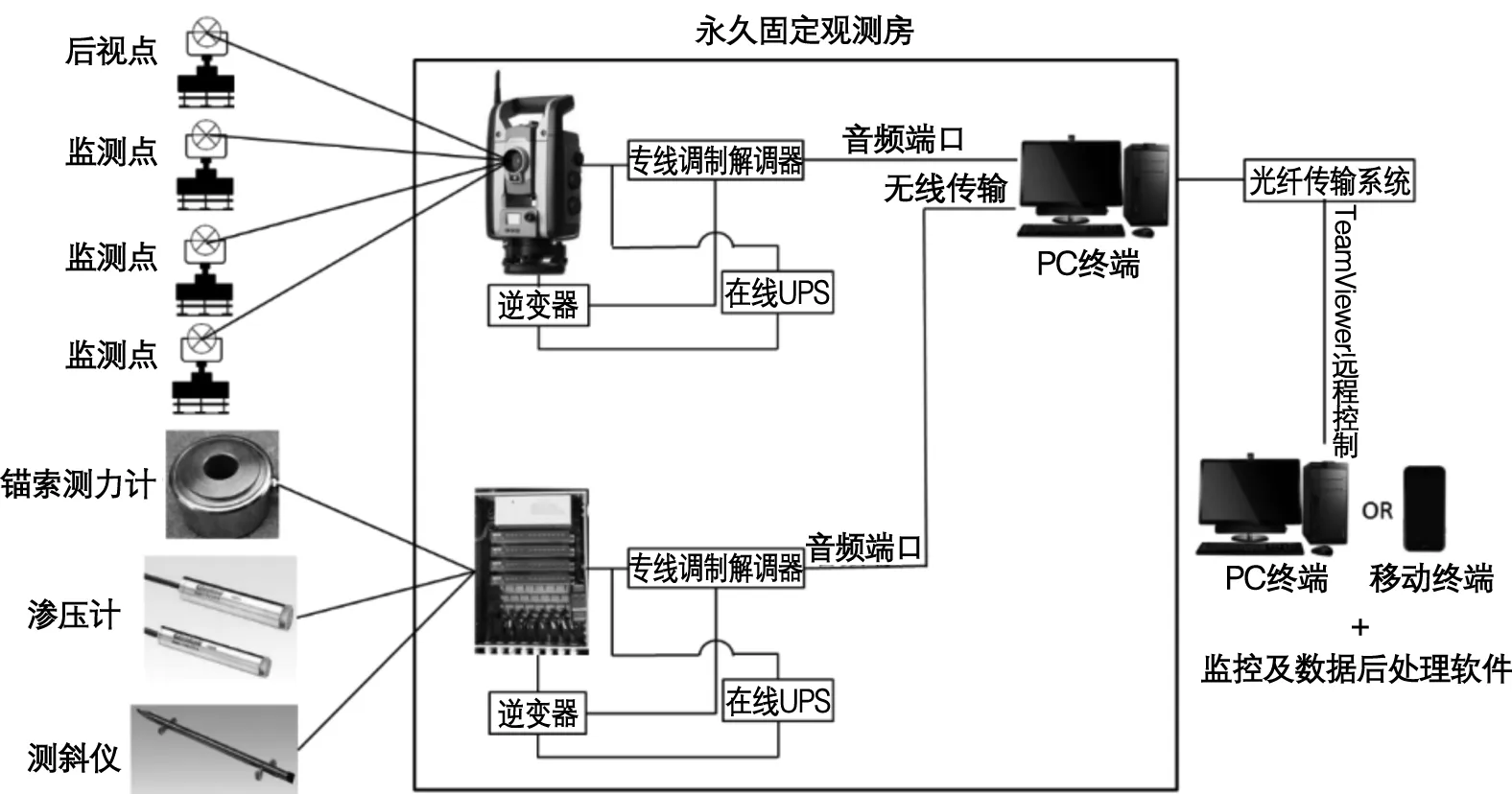
图3自动化监测系统
如图3所示,全站仪采用天宝专用数据线与电脑连接,同时解决了数据的传输与全站仪供电问题。测站设立采用自由设站的方式,在强制观测墩上固定全站仪,设置假定坐标系。初次测量时,选用人工教学模式,系统自动记录所有后视点、监测点位置,并自动进行多测回测角,精确计算各点初始坐标。通过软件设置定期复测的频率,本项目选定时间间隔为 1 h,复测时先对控制网进行复测,经计算控制网稳定后对监测点逐一测量,同时系统添加了未发现目标点时再次寻找功能,确保复测监测点时无遗漏。
传感器与数控采集箱采用有线连接,将采集的数据通过无线网桥通信技术远程回传到机房数据处理中心。
数据处理功能采用Trimble 4D软件将采集数据的粗差自动剔除,复测完基准网后进行基准网的稳定性分析,最后将测量数据进行平差处理。基于本项目采用单测站重复观测,在自主研发的基坑在线监测系统中添加了测量数据的差分改正[10],通过基准点的测量坐标与初始坐标的差值对监测点坐标加以改正,包括距离差分改正、方位角差分改正和球气差改正三个方面。
3.3 数据发布与预警
数据经采集与处理平台处理后,存入到系统监测平台的SQL Server数据库中,采用SOA(Service Oriented Architecture )架构,我们开发了基坑在线监测系统用于监测成果在线发布与预警系统。该系统集成了数据查询、数据分析、视频管理、报警设置等多个模块,整体效果如图4所示。图中镜头与实际监测点位吻合,点击镜头图标,可以查看该检测点的累计沉降量与本次沉降量情况,并自动绘制时间序列曲线,直观动态地反映出基坑的变形情况。
另外,可以通过该系统设置监测点形变报警阈值。当监测点累计变化量超过预先设定的累计值时,系统可快速地发出警报,将变化量超限的点反馈给工作人员,同时提醒建设单位,防止危险事故发生。我们还开发了Android版移动端的基坑在线监测系统软件,为监测工作者提供了更便利的条件,确保工程顺利实施。
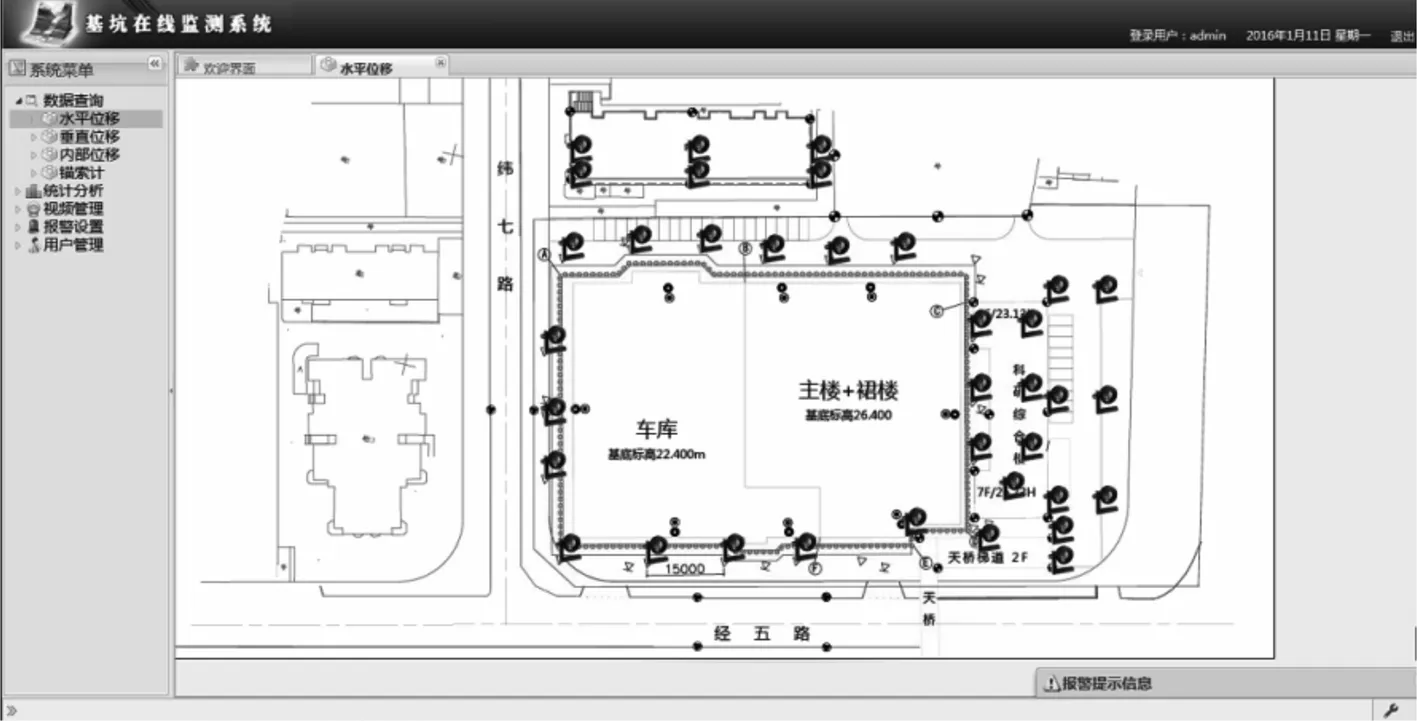
图4电脑端基坑在线监测系统软件
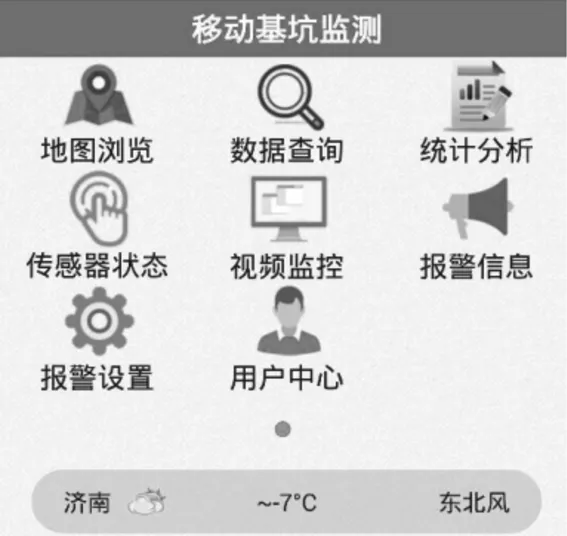
图5 移动端基坑在线监测系统软件
4 结 论
本项目突破常规的运用全站仪进行变形监测的自动化监测模式,全面实现了城市深基坑变形与内力监测数据自动化采集、处理、发布、预警,将变形监测与内力监测有机融合到同一监测平台,通过全站仪和采集箱将监测数据实时采集处理,并通过网络将监测数据实时反馈,对施工进行指导,为建设方提供合理化建议。
自动化监测系统具有实时动态测量、受外界干扰因素小、测量精度高、节约人力成本等多方面优势,在城市深基坑监测中应用前景广泛。
[1] 黄志伟,王克荣,田金鑫等. 深基坑水平位移监测的自动测量及数据处理方法研究[J]. 工程勘察,2013(7):79~82.
[2] 丁智,王达,虞兴福等. 杭州地铁新塘路、景芳路交叉口工程深基坑监测分析[J]. 岩土工程学报,2013(S2):445~451.
[3] 周二众,刘星,青舟. 深基坑监测预警系统的研究与实现[J]. 地下空间与工程学报,2013(1):204~210.
[4] 刘沛. 自动化全站仪在高层建筑基坑变形监测中的应用[J]. 测绘与空间地理信息,2011(3):239~241.
[5] 郭建强,龚洪祥,李俊才等. 地铁车站深基坑施工对临近建筑物影响的控制[J]. 建筑科学,2008(9):91~95.
[6] 储征伟,钟金宁,段伟等. 自动化三维高精度智能监测系统在地铁变形监测中的应用[J]. 东南大学学报·自然科学版,2013(S2):225~229.
[7] 卫建东. 基于测量机器人的自动变形监测系统[J]. 测绘通报,2006(12):41~44+72.
[8] 陈喜凤,黄腾,刘岭等. GeoMoS在地铁保护区自动化监测中的应用[J]. 测绘工程,2013(2):64~69.
[9] 贺磊,许诚权,陆晓勇等. 测量机器人自动化测量在地铁结构变形监测中的应用[J]. 城市勘测,2015(1):137~139.
[10] 包欢. 大型建筑物实时形变监测系统理论及应用研究[D]. 郑州:解放军信息工程大学,2009.
ApplicationofAutomaticMonitoringSysteminUrbanDeepFoundationPitMonitoringProject
Wang Peng,WangYu,Hu Wenkui,Lin Xianghong
(Jinan Surveying and Mapping Research Institute,Jinan 250101,China)
Based on many difficulties in monitoring deep foundation pit of city by traditional measurement method,through the automatic monitoring system for fusion of multiple sensors,combined with the actual situation,the monitoring network setting mode and measurement method are studied. In addition,the monitoring data is corrected by controlling network adjustment and multi-phase data difference. Real time publication and alarm of the data are realized. The data is true,accurate,timely and reliable,it has important reference significance for the application of automatic monitoring system in monitoring deep foundation pit in the future.
automatic;dynamic monitoring;sensor fusion;data difference;release and alarm
1672-8262(2017)06-122-04
P258
B
2017—03—15
王鹏(1972—),男,高级工程师,主要从事城市工程测量技术管理工作。
猜你喜欢
煤(2021年10期)2021-10-11 07:06:12
建材发展导向(2021年9期)2021-07-16 07:10:36
北京测绘(2020年12期)2020-12-29 01:37:18
工程与建设(2019年3期)2019-10-10 01:40:18
建材发展导向(2019年11期)2019-08-24 06:36:24
采矿与岩层控制工程学报(2018年5期)2018-11-08 08:15:02
机械管理开发(2018年7期)2018-08-02 01:32:10
江西建材(2018年1期)2018-04-04 05:26:48
中华建设(2017年1期)2017-06-07 02:56:13
电测与仪表(2016年9期)2016-04-12 00:29:52