
基于DSP的组合导航系统设计和开发
2017-12-27 08:42冯志刚黄启飞沈阳航空航天大学自动化学院沈阳110136
沈阳航空航天大学学报 2017年6期
冯志刚,黄启飞(沈阳航空航天大学 自动化学院,沈阳 110136)
基于DSP的组合导航系统设计和开发
冯志刚,黄启飞
(沈阳航空航天大学 自动化学院,沈阳 110136)
设计了以DSPTMS320F28335作为控制系统核心处理器的惯性/GPS组合导航系统,实现了姿态角、速度等控制参数的输出。将依靠惯性导航系统的算法算出的姿态角信息、位置的信息和GPS得到的导航信息进行组合,对得到的具体信息参数进行相应的卡尔曼滤波算法滤波处理,从而得到和实际运动数据近似的姿态角、位置信息等。最后对系统做了无人机实际飞行测量实验并达到预期效果,表明该设计具有实用价值。
DSP; 滤波算法 ; 控制参数;组合导航系统
目前可进行组合的导航技术有很多种,例如惯性导航技术、气压高度表技术、天文导航技术、磁力计技术等等[1]。使用惯性导航在比较短时间范围内准确度较高的特点来弥补卫星导航存在的信号接收慢信号缺失的劣势和不足[2]。本文提出的组合导航系统,采用TMS320F28335为控制系统的核心处理器,接收各传感器传输的数据,运行控制滤波算法等,利用加速度计、陀螺仪等器件获取无人机的姿态角和运动速度等运动位置信息,实现精确导航的目的[3]。
1 系统概述
本文提出的设计系统能够给出无人机当前的运动参数和状态,主要包括的信息有载体位置的信息、载体速度信息、载体高度信息等,系统的主要的组成部分由DSP处理器、供电电源、显控系统、RS232通讯接口、EEPROM参数存储器、陀螺仪、加速度计、高度计、磁力计以及GPS接收机,它的整体结构图如图1所示。

图1 系统结构框图
结合无人机导航实验测试进行各种性能测试[4]。本设计系统预期要达到的参数指标如下:定位精度:1.8 m(CEP);速度精度:0.03 m/s(RMS);俯仰、横滚角精度:0.04°,1°;航向角精度:0.1°;输出频率:100 Hz。
2 硬件电路设计
2.1 电源电路设计
本组合导航设计系统的供电模式为双电源供电,CPU内核的供电压为1.9 V,接口I/O口的供电压为3.3 V,这样的目的是减小了整个芯片的功率消耗。使用具有双路电压的TPS767D301,它具有低压差调整器功能及双路输出、单独供电的功能,其中一路可以稳定3.3 V的电压输出,另外的一路是输出电压可控,其可以在1.5~5.5 V范围内变化调节;两路可输出范围为0~1A电流,电路原理图如图2所示。
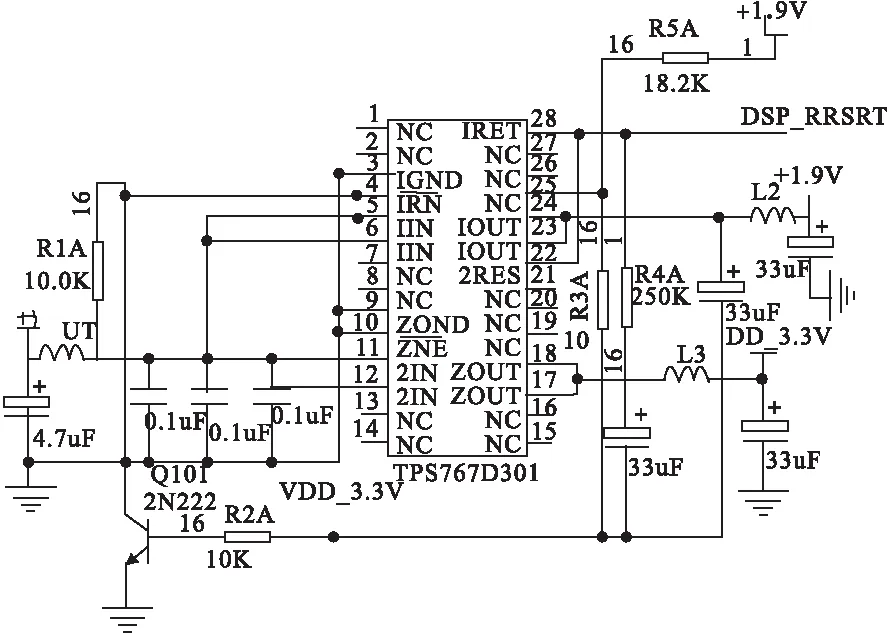
图2 系统供电模块电路图
2.2 控制参数存储电路设计
存储控制参数电路,在系统工作过程中对于不同情况的控制参数进行存储,在调试过程中可进行参数提取和组合以方便控制系统调试,在调试完成存储不同控制模式的控制参数,DSP根据不同的控制方式读取不同的控制参数完成控制算法的自修改。电路原理图如图3所示。

图3 参数存储器电路图
2.3 磁信号采集电路设计
该硬件电路主要是HMC5983L以及周围的辅助部分构成,HMC5983L传感器包括高分辨率HMC5118X系列磁阻,并且附带有先进的霍尼韦尔的集成电路,其中包括12位的模数转换器放大器,能使罗盘控制在1°~2°之间的精度范围内,另外还包括消磁驱动器、偏差校准等,通过SPI协议与DSP通讯,实时传送采集的信息。电路原理图如图4所示。
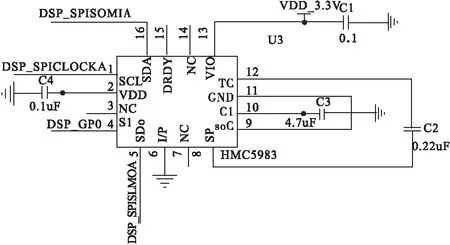
图4 磁采集电路图
2.4 高度信号采集电路设计
高度信号采集传输电路主要是由MBP180传感器和周围电路组成,MBP180是一款高精度的压力传感器,主要的特点是超低功耗,工作过程非常节省电能,根据当前空气的压力进一步解算出现在导航载体所处的高度,在运动和高速移动的设备中具有优良的性能,精度可以达到0.03 hPa,耗电量极低。直接由I2C总线与DSP通讯,实现简单的链接的数据传输方式。电路原理图5所示。

图5 MBP180高度信号采集电路图
2.5 加速度信号采集电路设计
加速度信号的采集电路,主要是由ADXL350和他周围的复制电路组成的。ADXL350传感器是有一种低功耗的需要三个采集三轴的加速度计。其功耗非常低,测量范围可以选择设定,分辨率高。它提供了世界领先的噪声性能和温度性能,保证使用过程中的稳定性,非常容易校准。输出的数据为16位二进制补码格式采用SPI总线通讯的方式,与DSP数字接口通讯。
Vs=2.5 V时(典型值),测量模式下低至45 μA。单个的电路原理图6所示。
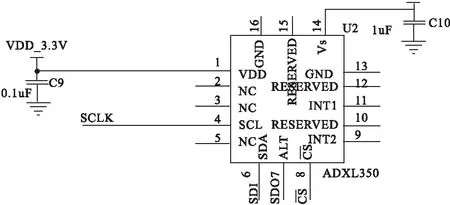
图6 ADXL350加速度采集电路图
2.6 角速度信号采集电路设计
由CRM100传感器为核心、周围电路为辅助的导航角速度信号硬件采集电路, 需要CRM100把三轴的加速度采集保存,通过SPI接口传输给DSP。电路原理图7所示。
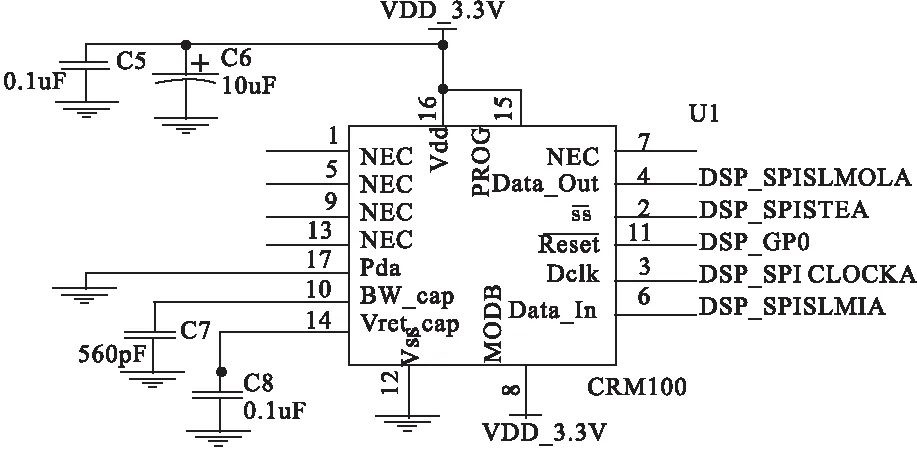
图7 角速度采集电路图
3 软件与算法实现
3.1 软件实现流程
设计系统存在两种工作状态,初始化参数对准和运行导航状态[5]。软件流程图8所示。
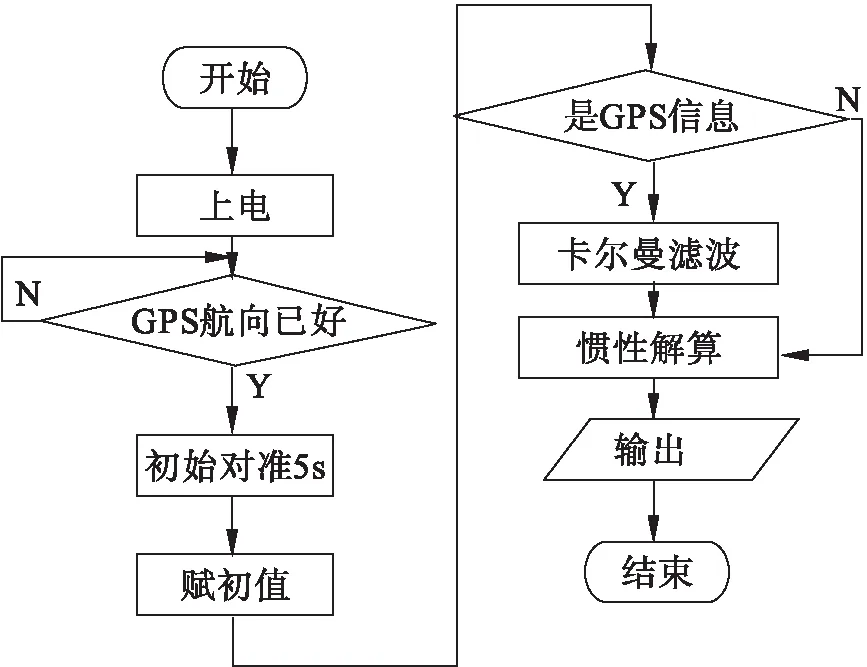
图8 软件流程图
系统开始阶段上电,然后检测GPS信号。初始对准阶段:采用解析粗对准方案。初始化对准时间长度为5 s,在此时间段内,需要分别累加陀螺角度增量、加速度增量,在初始时间5 s结束以后,分别计算出角速度和加速度增量的平均值[6]。
3.2 解算算法
本设计采用自适应卡尔曼滤波算法,一般情况下假设系统的噪声Wk和测的噪声Vk为零均值的高斯白噪声,并且方差阵Q和R作为已知量矩阵[7]。相对于组合导航来说,惯导系统不断进行反复测试试验,得到设计系统随机噪声分布的统计特性,可是量测得到的噪声的特性是离散的,规律性未知,应用环境不断变化,随机噪声也不断变化。我们使用测量得到的信息,重新调控整理量测噪声分布的统计特性,目的是对系统状态达到一个精确估计。假设设计的数学模型准确度可靠,那么残差序列理论上应是零均值的高斯白噪声,残差方差实际应用的测量值与自适应卡尔曼滤波处理获得的残差方差的理想值的比值大约为1。如果上面比值长时间大范围波动,那么显然量测噪声已经明显发生了改变,需要进一步对量测噪声进行调整协方差阵R[8]。调整的准则是使此比值回到1附近。综上所述,其设计滤波器如下。
χk/k-1=Φk,k-1χk-1
(1)
(2)
(3)
χk=χk/k-1+KK(ZK-HKχk/k-1)
(4)
ρK=(I-KKHK)ρK/K-1
(5)
(6)
上述公式Rk表示,估计第k步的时候,得到的量测噪声的矩阵估计值;公式中Sk的含义为量测噪声矩阵Rk-1的参数调整的系数;b为常数,是一个符号为正的常数,表达的含义是噪声的量测矩阵调整系数Sk的放大和缩小程度[9]。当b> 1时,表示放大系数Sk对参数Rk整定的作用情况,这种情况下,当量测噪声不断变化的过程中,Rk的值在较少步数的范围内,可以迅速接近真实量测噪声的值。当b的选取值过大时,虽然可以满足Rk的自适应调整时间很短,但是可能产生Rk在量测噪声真实值的小范围内出现小幅度振荡[10]。当b< 1时,表示降低了Sk对Rk调控的作用,这样的结果是,使自适应的调整参数Rk可以进一步精确地在真实量测噪声值上保持稳定,但是导致需要较长的时间Rk才能调整到实际的量测噪声值。当b= 0的情况下,表达的含义为Sk对Rk没有调控作用,此时上述自适应滤波方法失效,变成一般的常规卡尔曼滤波[11],根据状态变量得到系统做卡尔曼滤波的F阵为
速度位置组合的量测矩阵为
其中,VGPS,ψGPS,LGPS,λGPS分别给了载体的合速度、载体的轨迹航向、经纬度[12]。
4 系统试验测试
本组合导航系统设计完毕以后,对该系统作了相应的试验测试,提供的方法如下:把设计制作好的本导航系统安装在飞行器上,让飞行器在空中做随机的路线飞行,得到本系统的输出数据结果,各信息在x轴的输出结果如图9所示。
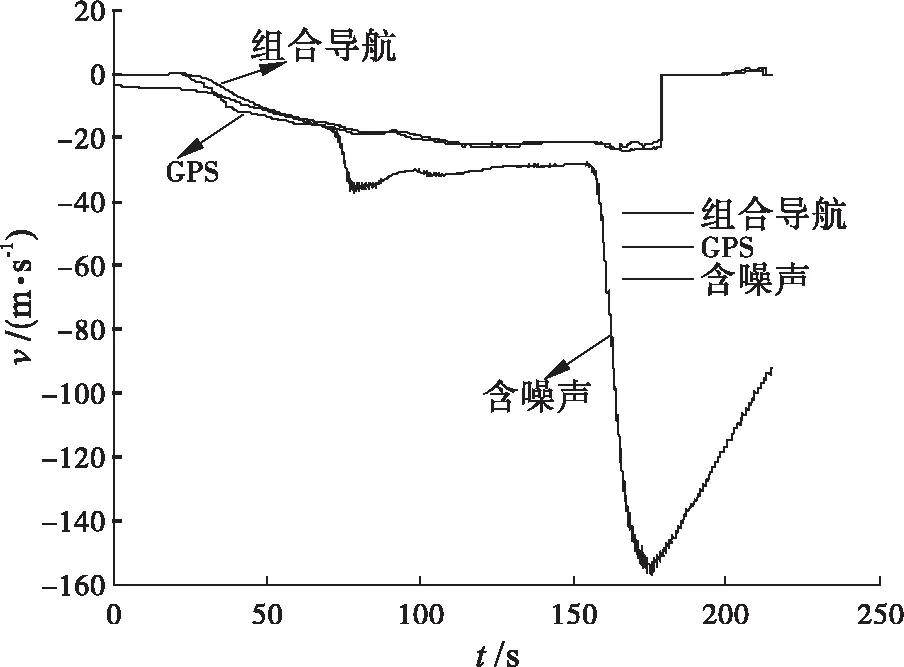
图9 组合导航系统/GPS/含噪声导航输出速度曲线对比图
可以看出,用GPS输出的速度信号来分析该设计系统,结合组合导航系统输出曲线和含噪声速度曲线,可以分析出本系统的速度导航误差精度范围在0.02 m/s以内,可以很好地满足设计的要求[13]。
系统测试数据与GPS信号提供的位置信息与含噪声的位置信息输出结果如图10所示。

图10 组合导航系统/GPS/含噪声导航输出位置曲线对比图
分析图10,同样用GPS输出的位置信息作为参考标准来衡量系统的位置输出误差,结合组合导航输出的位置信息,可以分析出位置精度可以控制在1.6 m以内,也可以满足最初的设计标准[14]。
该系统输出的测试数据结果与单独由GPS导航信号的航向角结果与含噪声的结果如图11所示。
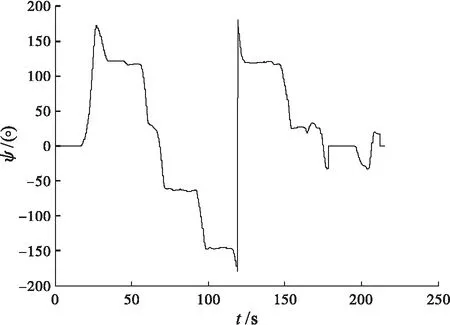
图11 组合导航系统/GPS/含噪声导航输出俯仰角度曲线对比图
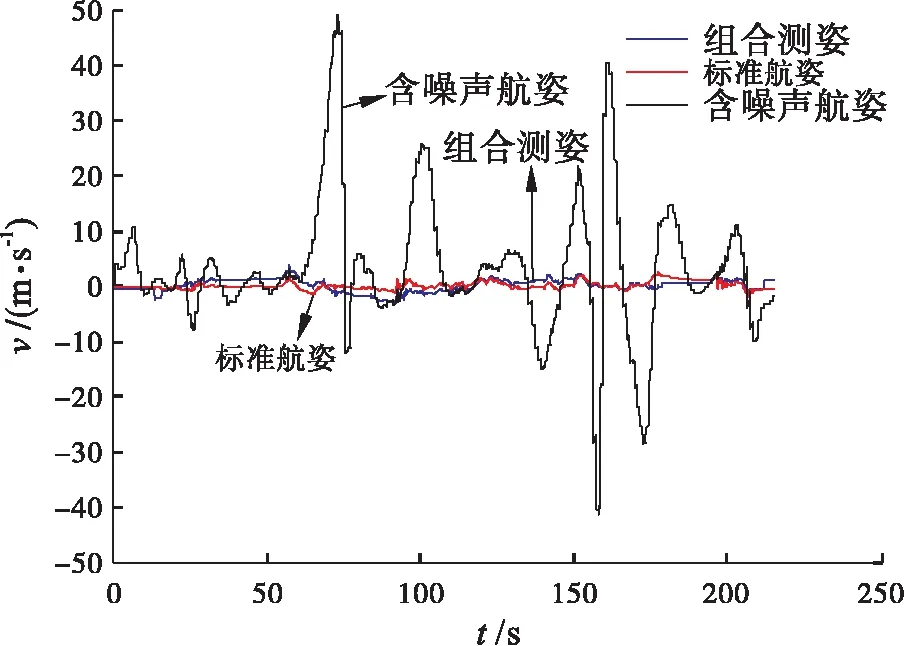
图12 组合导航系统/GPS/含噪声导航输出滚动角度曲线对比图
由图11和图12分析得系统的航向角精度都在0.1度范围内,都可以很好地满飞行器的航向飞行精度要求[15]。
图13和图14为本设计实物图。

图13 组合导航系统控制板实物图
图14 为GPS信号接收机电路板
5 结论
本文介绍了一种基于DSP组合导航系统,本系统利用GPS接收机、陀螺仪、加速度计、磁力计、高度计等多种传感器,用DSP28335芯片实现了数据处理和信号采集,在对导航数据完成实时采集的同时,进行解算和数据融合。虽然本系统的结构简单,但是对导航信息能够实时处理,并且提供了高质量的导航信息,系统的试验测试取得了良好的效果。
[1] 苗锡奎,朱枫,郝颖明.多像机非共视场的非合作飞行器位姿测量方法[J].红外与激光工程,2013,42(3):709-715.
[2] 寇艳红,张其善,李先亮.车载GPS/DR组合导航系统的信息融合新方案[J].传感技术学报,2002(1): 7-12.
[3] 李子月,张林,陈善秋,等.捷联惯性/卫星超紧组合导航技术综述与展望[J].系统工程与电子技术,2016,38(4):866-874.
[4] 慈海波,吕妍红.基于惯性/GPS组合的车载测试系统的设计[J].自动化与仪表,2013,28(3):1-4,9.
[5] NASSAR,SAMEH,PRIYANKA,et al.INS/GPS sensitivity analysis using different kalman filter approaches[J].Proceedings of the Institute of the Institute of Navigation,National Technical Meeting,2006(2):993-1001.
[6] BROWN,A.K.GPS/INS uses low-cost MEMS IMU[J].Aerospace and Electronic Magazine,2005,20(9):3-10.
[7] VASCONCCELOS J F.CALVARIO J.Symposium on intelligent autonomous vehicles instituto superior[J].Tecnico Portugal,2004,21(1):1-15.
[8] 高社生,何鹏举,杨波,等.组合导航原理及应用[M].西安:西北工业大学出版社,2012:40-186.
[9] 杨柳庆,肖前贵,牛妍,等.基于渐消卡尔曼滤波器的定位系统设计[J].南京航空航天大学学报,2012,44 (1):134-138.
[10]刘向宇.DSP嵌入式常用模块与综合系统设计实例精讲[M].北京:电子工业出版社,2009:1-15.
[11]WILCOX,J.C.A new algorithms for trap-down intertialnavigation[J].IEEE Transaction on Aerospace on Electronics system,1967(5):796-802.
[12]王健,赵国生.MATLAB数学建模与仿真[M].北京:清华大学出版社,2016:15-186.
[13]管雪元,陈帅.一种相关跟踪算法在小内存DSP上的实现[J].微计算机信息,2007,23(9-2):185-186.
[14]孙永荣,刘建业,刘瑞华,等.微小型导航系统中高精度导航计算机设计[J].传感器与微系统,2006,25(10):54-56.
[15]冯禹,王向军,陈文亮.相对位姿测量解算的DSP实现[J].传感技术学报,2016,29(1):35-39.
DesignanddevelopmentofintegratednavigationsystembasedonDSP
FENG Zhi-gang,HUANG Qi-fei
(College of Automation,Shenyang Aerospace University,Shenyang 110136,China)
An inertial/GPS integrated navigation system with DSP TMS320F28335 as the control system′s core processor is designed to achieve the output of control parameters such as attitude angle and speed.The information of the attitude angle and position can be calculated by the algorithm of the inertial navigation system,and the navigation information is available from the GPS.Then,the different information iscombined and further filtered by the corresponding Kalman filtering algorithmto obtain the attitude angles and position information similar to the actual movement data.Finally,the actual flight measurement experiment of the unmanned aerial vehicle with the designed system is carried out and the result shows that the design is of practical value.
DSP;filtering algorithm;control parameters;integrated navigation system
2017-09-19
辽宁省高等学校优秀人才支持计划第二层次(项目编号:LJQ2014017)
冯志刚(1980-),男,河北石家庄人,副教授,主要研究方向:传感器信息处理,E-mail:1573561435@qq.com。
2095-1248(2017)06-0072-06
V249.32+8
A
10.3969/j.issn.2095-1248.2017.06.012
刘划 英文审校:齐义文)
猜你喜欢
力学学报(2020年4期)2020-08-11
科学咨询(2020年53期)2020-03-19
商品与质量(2019年22期)2019-11-29
电子制作(2019年16期)2019-09-27
科学导报·学术(2019年44期)2019-09-10
电子制作(2019年23期)2019-02-23
黑龙江电力(2017年1期)2017-05-17
厦门理工学院学报(2016年1期)2016-12-01
赤峰学院学报·自然科学版(2014年1期)2014-03-23
电子设计工程(2014年19期)2014-02-27
