
磁流变飞机起落架模型参考自适应缓冲控制及联合仿真
2017-12-27 09:50:20于漪丁杨超然沈阳航空航天大学自动化学院沈阳110136
沈阳航空航天大学学报 2017年6期
傅 莉,于漪丁,杨超然,胡 为(沈阳航空航天大学 自动化学院,沈阳 110136)
信息科学与工程
磁流变飞机起落架模型参考自适应缓冲控制及联合仿真
傅 莉,于漪丁,杨超然,胡 为
(沈阳航空航天大学 自动化学院,沈阳 110136)
基于虚拟样机技术构建了某型飞机起落架缓冲系统动力学模型,提出一种基于模型参考自适应控制的磁流变飞机起落架缓冲控制方法,设计了基于Matlab/Simulink的磁流变飞机起落架模型参考自适应缓冲控制联合仿真模型,定义了数据交换接口,完成了某型号飞机起落架落震缓冲过程的力学与控制的联合仿真验证,通过基于模型参考自适应控制的飞机起落架缓冲系统与传统被动式油液式缓冲系统的缓冲效果对比分析,验证了提出的基于模型参考自适应控制的飞机起落架磁流变缓冲系统替代油液式缓冲系统的可行性与良好的减震效果。
模型参考自适应控制;磁流变阻尼器;起落架缓冲系统;落震联合仿真
现代大多数飞机都采用油气式被动缓冲系统,虽然它可以调整阻尼孔节流面积,进而调整油液阻尼力的变化,但是其调整范围是有限的,而且一旦制造成成品,其阻尼孔大小就固定了。磁流变液具有较好的连续性和可逆性,频率响应为毫秒级,可以有效地克服油气式阻尼器阻尼不可调的缺点,有效改善起落架着陆缓冲性能[1-3]。
模型参考自适应控制系统(Model Reference Adaptive System,简称MRAS)是目前理论上较为成熟的一类自适应控制方法[4-5]。主要应用在温控系统和机器人关节臂控制方面,在冲击场合的应用并不多见。MRAS主要包括参考模型、控制器、被控对象(过程)和自适应机构等。系统在求解过程中,参考模型被看作是期望目标,力求被控对象和参考模型的输出误差趋于最小。考虑模型参考自适应控制能够模拟元件实现且速度快,本文设计了面向飞机起落架的基于模型参考的自适应控制器,并将其应用在磁流变飞机起落架缓冲控制系统中。
同时,传统的起落架落震仿真是基于简化后的力学模型,并没有精确考虑起落架自身结构限制对落震缓冲带来的影响,而且整个仿真过程不可视,模型的构建精度会直接影响仿真结果。本文基于虚拟样机技术,将磁流变飞机起落架落震缓冲控制与起落架ADAMS动力学仿真结合起来,通过落震联合仿真验证算法的正确性与有效性。
1 基于磁流变起落架模型
1.1 磁流变阻尼器力学模型辨识
构建基于Bingham塑性模型的磁流变阻尼器力学模型,同时完成其参数辨识[6],得到磁流变阻尼器的力学模型如公式(1)所示。
(1)

1.2 磁流变起落架落震运动方程
根据起落架两个质量模型,建立如图1所示基于磁流变阻尼器的飞机起落架模型[7-8]。其中M1为起落架的弹性模型质量,M2为起落架非弹性模型质量,k1为起落架的刚度系数,k2为起落架的轮胎刚度系数,x1为弹性质量的位移,x3为非弹性质量的位移。磁流变阻尼器采用bingham模型,阻尼力表达式如式(2)所示。
(2)

图1 磁流变飞机起落架力学模型
根据图1建立起落架的动态模型:
(3)

(4)


2 基于模型参考的磁流变缓冲系统自适应控制器设计
模型参考自适应算法设计方法[9]主要有两种:一种是基于局部参数最优化的模型参考自适应控制设计方法,另一种是基于李雅普诺夫稳定性的模型参考自适应控制设计方法[10]。当出现一个非线性系统或者一个时变系统时,前者不能保证系统的稳定性,必须通过最终的稳定性检验。为克服局部参数最优化方法设计出的MRAS不一定稳定的缺点,本文采用李雅普诺夫稳定性理论推导MRAS的自适应控制律[11],可以用于任意阶的系统,在求出自适应控制律的同时,还可以确保系统的稳定性。
设计参考模型状态方程为
(5)
设被控对象状态方程为
(6)

设自适应控制器为
w1=K(t)w+F(t)xP
(7)
其中,K(t)为前馈增益矩阵,F(t)为反馈补偿矩阵。
将式(7)代入式(6)得

(8)


(9)
调整K(t)和F(t),使可调系统与参考模型相匹配,此时可得到
Am=AP+BPF*(t)
(10)
Bm=BPK*(t)
(11)
其中,K*(t),F*(t)表示模型完全匹配时的取值,则式(9)可写成
(12)

设李雅普诺夫函数为

(13)


(14)
式(14)又可以写为
(15)
(16)
进而可得
(17)
即:
(18)
这里选取F(0)=K(0)=0,R1,R2为4阶单位矩阵。
因此可得出自适应控制器:w1=K(t)w+F(t)xP。
3 基于虚拟样机技术的磁流变起落架模型
首先,通过机械系统动态仿真分析软件MSC.ADAMS/View建立某型号飞机的前起落架系统的虚拟样机[12],再利用控制仿真软件Matlab/Simulink设计基于磁流变的模型参考自适应控制系统,同时定义软件的数据交换接口,进行落震动态性能联合仿真[13-14],对比分析基于模型参考自适应控制的飞机起落架缓冲系统与传统被动式油液式缓冲系统的缓冲效果,验证了提出的基于模型参考自适应控制的飞机起落架磁流变缓冲系统替代油液式缓冲系统的可行性与良好的减震效果,得到更接近工程情况的起落架落震仿真。
3.1 输入输出变量设置
本文采用机械系统运动学和动力学[15]仿真平台ADAMS/View建立起落架模型主要包括支柱、外筒、轮胎、与轮胎接触的水平轴等,如图2所示。轮胎选择ADAMS中应用最广泛的Fiala轮胎模型,路面模型为2D模版,即二维跑道。
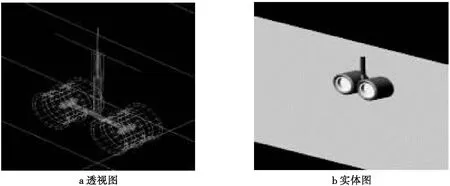
图2 磁流变飞机起落架落震模型
3.2 仿真参数设定
仿真参数设置:在ADAMS/View中不拥有ADAMS/aircraft中专门用于落震的仿真平台,所以不可能简单地输入降落速度、飞机重量等参数。在ADAMS/View建模过程中需要添加质量块来代替机身重量,降落速度可以通过物体的自由落体运动来实现,根据设计轮胎与地面的高度,进而得到需要的着陆速度[16],具体参数如表1。

表1 输入参数设置
3.3 结果分析
将ADAMS/View与Matlab联合仿真得到的结果,与参考模型、传统被动式油液阻尼器的仿真结果进行对比,如图3所示。
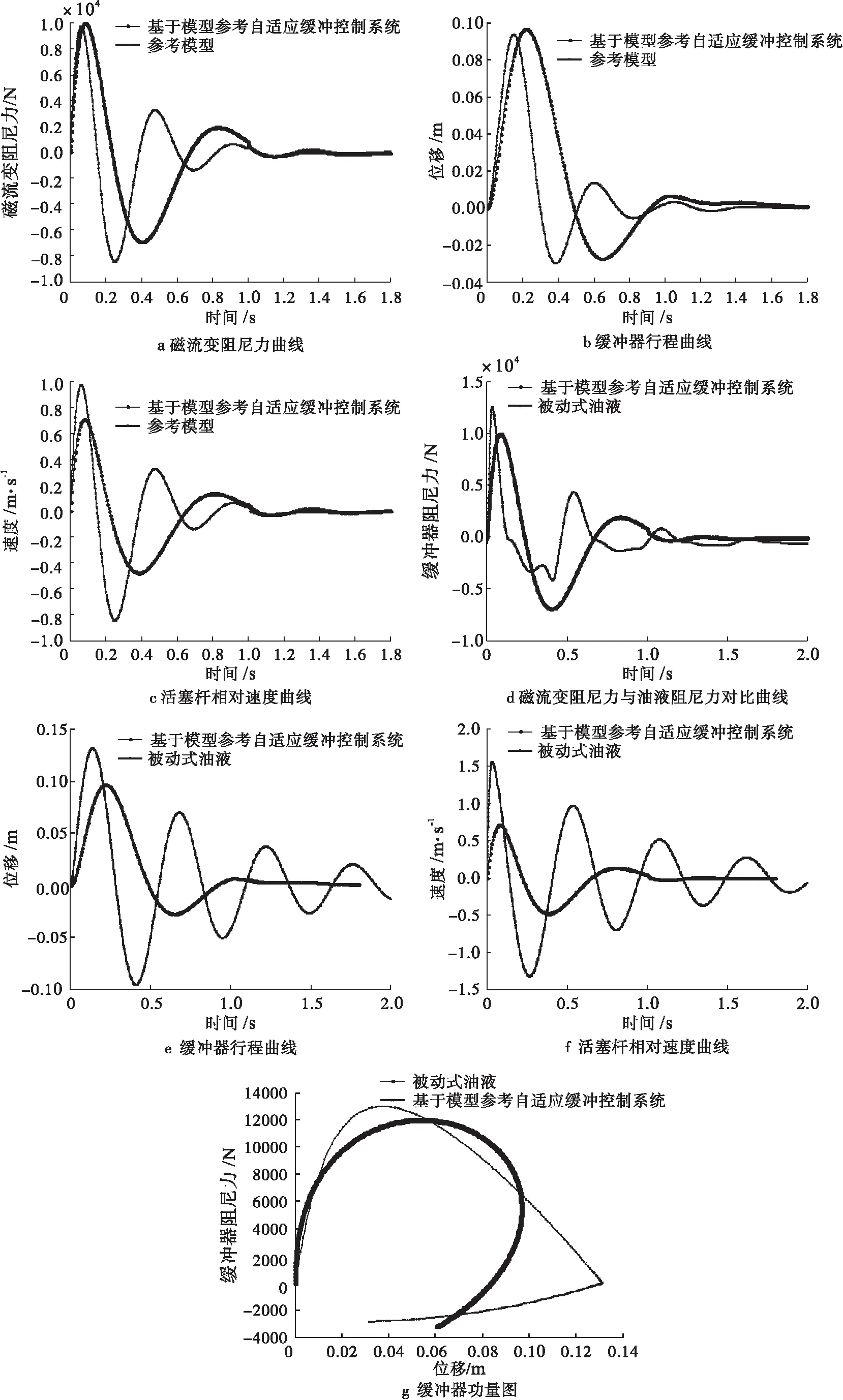
图3 某型起落架落震仿真结果
与参考模型对比的仿真结果可以看出,机械系统出现一定的跟踪延迟是不可避免并且可接受的。在李雅普诺夫稳定性的基础上,设计的模型参考自适应控制系统具有很好的减震效果,它可以使被控系统的输出很好地跟踪参考模型的输出,并且使输出误差朝着接近零的方向减小。
在与被动式油液阻尼器的对比中可以看出,磁流变阻尼力较小,系统平衡时间短,缓冲器速度、压缩行程较小;系统响应时间短,震荡幅度小,尤其对第二冲程有很好的控制效果。起落架落震时,缓冲器没有压缩,行程为0。当机轮撞击地面,缓冲器开始压缩。在0.75 s左右缓冲器的行程达到最大值,最大值为9.44×10-2m,平衡时间约为1.25 s,磁流变阻尼力最大约为9.68×103N。根据缓冲器的功量图3(e)可知 ,联合仿真控制缓冲器的最大轴向力是1.21×104N,通过计算可得缓冲器缓冲的能量为9.09×102J,飞机所受地面冲击的总能量为1.14×103J,故缓冲器的缓冲效率达到约79.78%。对比可见,联合仿真结果比被动式油液阻尼控制效果更好,并且能够较真实地反应出整个起落架缓冲系统的工作状况。
4 结论
本文提出了基于模型参考自适应控制的磁流变飞机起落架缓冲控制方法,并通过虚拟样机联合仿真加以验证。提出的缓冲控制方法能够有效控制磁流变阻尼系统对落震冲击带来的冲击能量,通过缓冲效率的计算,设计的缓冲系统取得了良好的缓冲控制效果。相比传统被动缓冲控制系统,本文提出的基于模型参考自适应控制的磁流变飞机起落架及其联合仿真验证的主要优势在于:
(1)从控制算法方面分析,本文建立了冲击作用下的磁流变阻尼器状态方程;提出了面向飞机起落架磁流变模型参考自适应控制方法,通过仿真验证可以看到,基于模型参考自适应磁流变缓冲控制系统能够有效调节冲击力大小,较好地解决被动的油气缓冲器在落震和滑跑过程中“过软”和“过硬”问题;
(2)从仿真验证手段来说,通过虚拟样机与控制算法的联合仿真,避免了单纯控制算法仿真的计算模型过度简化问题,更真实地反应出磁流变起落架落震的工作状况,提高了系统验证的可信度,同时增加了可视化程度。
[1] 欧进萍.结构振动控制-主动、半主动和智能控制[M].北京:科学出版社,2003.
[2] 何永勃,苏兴国,刘娜.基于磁流变减震器的起落架着陆建模及仿真[J].现代电子技术,2011,34(1):70-73.
[3] ANDRZEJ M,MIKOLAJ H.Application of magnetorheological fluid in industrial shock absorbers[J].Mechanical Systems and Signal Processing,2012,28:528-541.
[4] YADAV,ANIL K.A comparative analysis between MRAC and FMRAC for an unstable system[C].Proceedings of the 10th INDIACom,2016:2449-2455.
[5] ZHANG S G,FENG Y,ZHANG D.Application research of mrac in fault-tolerant flight controller[J].Procedia Engineering,2015,(99):1089-1098.
[6] FU L,LIN L P,XU X H.Research on modeling and fuzzy control of magneto-rheological intelligent buffer system for impact load[J].Journal of Shanghai Jiaotong University,2012,17(5):567-572.
[7] 陈大伟,顾宏斌,吴东苏.基于磁流变阻尼器的起落架摆振半主动控制[J].中国机械工程,2010,21(12):1401-1405.
[8] 聂宏,魏晓辉.飞机起落架动力学设计与分析[M].西安:西北工业大学出版社,2013.
[9] 满永超,刘允刚.高阶不确定非线性系统线性状态反馈自适应控制设计[J].自动化学报,2014,40(01):24-32.
[10]HSU L,COSTA R R.Lyapunov design of multivariable MRAC via generalized passivation[J].Asian Journal of Control,2015,17(5):1484-1497.
[11]白珍龙,刘川来.应用Lyapunov理论设计分数阶模型参考自适应控制律[J].石油化工自动化,2015,51(05):43-47
[12]常凯,李胜军.基于虚拟样机的起落架收放系统仿真[J].航空科学技术,2015,26(07):46-50.
[13]祝世兴,潘玉洁.基于磁流变减震器的弹性机体起落架着陆仿真分析[J].液压与气动,2012,(12):73-76.
[14]JOHN Ö,JUHA L,TOMI V.F-18 hornet landing simulations using ADAMS and simulink co-simulation[C].AIAA Modeling and Simulation Technologies Conference and Exhibit,Honolulu,2013:6850-6858.
[15]TOMAS B,ZDENEK H,JAN V.Using of co-simulation ADAMS-SIMULINK for development of mechatronic systems[C].14th International Conference Mechatronika,Teplice,2011:59-64.
[16]WANG Z N,WU S X,GU X S,et al.Co-simulation research of autonomous landing control system[C].Control Conference.Oregon,2014:6352-6357.
Modelreferenceadaptivebufferingcontrolandco-simulationofmagnetorheologicalaircraftlandinggear
FU Li,YU Yi-ding,YANG Chao-ran,HU Wei
(College of Automation,Shenyang Aerospace University,Shenyang 110136,China)
In this paper,the dynamic model of buffer system for a certain type of aircraft landing gear was built based on the virtual prototype technology,and a buffering control method for magnetorheological landing gear was also proposed based on model reference adaptive control.A co-simulation model of model reference adaptive buffering control of MR aircraft landing gear was further designed based on the Matlab/Simulink and the data exchange interface was defined.The co-simulation model was verified for a process of drop-test buffering.The comparison of the results from buffering system of landing gear based on model reference adaptive control and the traditional passive oil buffering system shows that the proposed buffering system is feasible and has a good damping effect.
model reference adaptive control;magnetorheological damper;landing gear buffering system;drop test co-simulation
2017-09-25
中航创新基金(项目编号:cxy2013SH16);辽宁省特聘教授人才支持(项目编号:15021637)。
傅 莉(1968-),女,辽宁凤城人,教授,博士,主要研究方向:智能与自主控制技术,E-mail:ffulli@163.com。
2095-1248(2017)06-0066-06
V211
A
10.3969/j.issn.2095-1248.2017.06.011
刘划 英文审校:齐义文)
猜你喜欢
轻兵器(2022年3期)2022-03-21 08:37:28
铁道车辆(2021年4期)2021-08-30 02:07:14
电子测试(2018年15期)2018-09-26 06:01:04
军事运筹与系统工程(2016年3期)2016-09-26 11:41:04
电脑知识与技术(2016年10期)2016-06-16 19:27:57
自动化学报(2016年8期)2016-04-16 03:38:51
西北工业大学学报(2015年1期)2016-01-19 03:29:56
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23 08:20:35
电子设计工程(2014年19期)2014-02-27 12:00:54
锻压装备与制造技术(2013年1期)2013-06-29 02:26:28
