基于图像处理的智能交通灯控制系统
2017-12-22 07:35作者田佳欣陕西师范大学附中
电子制作 2017年21期
作者/田佳欣,陕西师范大学附中
基于图像处理的智能交通灯控制系统
作者/田佳欣,陕西师范大学附中
目前我国私家车持有量大,机动化出行比例高,城市道路交通拥堵情况严重,尤其是早晚高峰时期,为市民出行带来了极大的不便。而目前交通灯仍以规范秩序为主,未能依据实时路况改变灯时来缓解拥堵情况。在有关智能交通灯的研究中,常见有用环形线圈检测,但使用寿命短、更换不便;检测算法方面,传统的背景帧差法易受环境影响而使结果不够精准。本文采用视频检测,设置简便,能够获得较多道路信息,并采用最佳阈值的二值化分割更精准地确定目标,通过划定ROI减少运算量,使系统能够快速准确地获取道路拥堵信息并作出应对。
中值滤波;最佳阈值;二值化;ROI
1.概述
■1.1 背景
目前,我国机动化出行比例逐步增高。而当前,交通系统设置仍旧有不合理处,尤其是路口交通灯灯时的设置。当路口情况复杂、不同时段路况不同、车流量差异大时,固定的灯时难以适应道路交通情况的动态变化,使得交通状况无法得到缓解甚至更加恶化。因此,可及时调整灯时的智能交通信号灯的使用,将有利于缓解路口处的交通拥堵情况。
■1.2 研究现状
就交通信息检测方面,目前硬件部分的检测方法有环形线圈检测、视频检测、超声波检测等方法,其中环形线圈的埋设不够方便且线圈使用寿命短,而超声波检测器易受环境影响,相比之下,视频检测器设置方便,寿命较长,且受环境影响较小。检测算法方面,常用的有背景帧差法、连续帧差法和光流法。传统的背景帧差法受光线、天气等外界因素的影响大,且目标灰度值与背景灰度值相近时难以检测到目标;连续帧差法的适当应用较依赖于合理的帧间时间间隔,而实际情况中车辆速度有快有慢,故此方法在交通控制中的实际应用效果较差;光流法精度较高,但计算量大,实时性较弱。此三种方法各有优缺,在实际应用中需在其基础上加以改进。
■1.3 创新点
本文采用建立在YCbCr颜色空间上的背景帧差法检测车辆信息,优于传统的背景帧差法,并通过划分感兴趣区域减少运算量、增强实时性;同时使用能够高频处理信息的DSP芯片保证实时性,进而根据数据对交叉口红绿灯进行实时调控以代替固定灯时,使得路口的交通状况能够得到更精准合力的控制,从而一定程度地缓解拥堵现象。
2.硬件模块
■2.1 车辆信息采集
本文主要使用视频检测。
(1)基本过程
首先采用固定在交通灯杆上的摄像头拍摄道路交通状况(对于单车道的准确提取,一般应将摄像头安装在车道中心线所在平面内,安装高度为7.5~10m。如需其他视野范围,还需另调整角度等[1]),之后采用A/D转换器将模拟信号转换为数字信号并缓存,最后CPU处理所得信号,提取车辆信息。
(2)摄像机
采用以CCD传感器为核心的摄像机。重要参数如下:
a.像素数:像素数指的是摄像机CCD传感器的最大像素数,对于一定尺寸的CCD芯片,像素数越多则由该芯片构成的摄像机的分辨率也就越高。
b.分辨率:一般分辨率越高,则所包含的像素越多,图像越清晰,同时也占据更多存储空间。
(3)图像采集卡
图像采集卡也称图像捕捉卡,可将获取的视频音频数据输入电脑并将其转换为数字数据。为实现实时采集,需要使每帧图像的处理时间短于相邻两帧间的时间,避免丢帧。
■2.2 交通信号控制
基本要求是多路输入、多路输出,各项参数可以灵活设置。本文主要采用以DSP芯片为核心的控制机。
DSP 芯片的选取:作为控制机的核心,DSP芯片应满足能够快速高频处理信息、能够多路输入输出,并且保持一定的稳定性。故选用美国TI公司生产的TMS320G2812 DSP芯片作为主处理器芯片,它是32位高性能的定点芯片有56个通用的I/O口,并且有CAN通信接口,具备强大的数据处理能力[2]。
3.图像采集与处理
■3.1 滤波处理
各类图像处理系统工作时都处在复杂的环境中,图像均会被可见或不可见的噪声干扰,导致图像质量下降,还可能掩盖重要的图像细节,故在进一步操作之前,需要对采集到的图形进行滤波处理。
常用滤波方法有均值滤波、中值滤波。为了在去噪的同时较多地保留车辆的边缘信息,本文采用中值滤波法。中值滤波是一种非线性去噪方法,其基本原理是将图像中某一点的像素值用模板区域内像素的中间值代替。本文选择3×3的模板,中心点为被处理点。例如图1所示模板(斜体加粗部分),图2即为图1进行中值滤波后的结果。

图1

图2
■3.2 最佳阈值的二值化图像分割
为了获得最佳阈值,且使其不受噪声影响,本文采用基于迭代处理的彩色图像二值化阈值确定方法。该彩色图像建立在YCbCr颜色空间,其中Y代表亮度分量,Cb代表蓝色色度分量,Cr代表红色色度分量,每个像素点的像素值可保存为 f( x, y, 1), f( x, y,2),f( x, y ,3)等。具体算法如下:

(2)利用上述阈值将图像分割为两部分即1R、2R:

(3)计算 R1、 R2的红色色度和蓝色色度的均值 Z1r、

式中, N( x, y,2)、N( x, y ,3)是点(x, y)的权重系数,在此取 N( x, y, 2)= N( x, y ,3)=1.0。

采用此方法进行图像分割,可以减少错误,并将目标与背景分割开,便于确定目标,进行后续处理。
■ 3.3 获取ROI
在本系统下,摄像机获取的图像中除了需要处理的车道,还包括其他多余信息(如绿化带、行人等),若将这些多余信息一并处理,则会加大运算量,不便于整个流程的进行。因此,在待处理图像中设置感兴趣区域(ROI)十分重要[3]。
由于摄像机拍摄的图像中物体是近大远小的,故不能使用规则图形来选择感兴趣区域。ROI划定需要满足下列条件:
(1)ROI中包括且仅包括需要处理的车道信息;
(2)起始处必须包括停止线后的第一个车辆,终止处要到系统设定的最大值,即当车辆排队到此处时,即认为排队长度已达最大值,该方向上的绿灯延长时间需要最大。

图3
图3为依照上述规则作出的ROI。框内的感兴趣区域是一个不规则的图形,为提取该区域,采用以下方法[4]:
(1)建立一个与待处理图像相同尺寸、相同通道数的灰度值全为0的蒙版图;(2)在待处理图像中划定ROI的同时记录下四边形四个顶点的坐标;(3)在蒙版图中上述四个坐标点的位置标出四个像素点,形成一个闭合区域,并将此区域内的像素值都赋为255。则蒙版制作完成,如图4所示。

图4
(4)将模板像素值归一化,与原图进行相与操作,即可得到所选的感兴趣区域。如图5所示。
■3.4 测定队列长度
本系统对交通灯的控制与车队长度有关,因此需要测定车队的排队长度。在实际操作中,摄像头架设在车道上方7.5~10m高处,确定排队末端后,可得二维图像的排队长度,为了更符合实际情况,需通过运算将其转化为实际的排队长度。示意图如图6所示。运算如:

图5
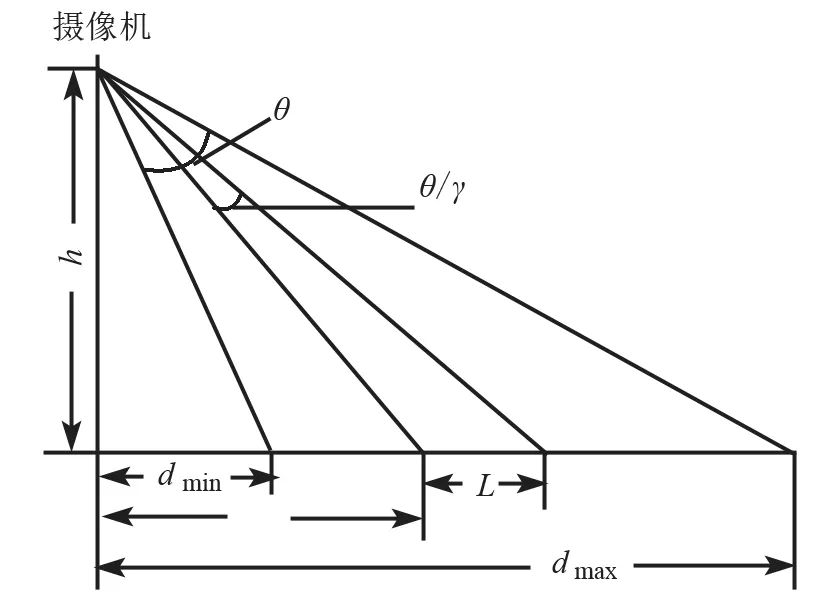
图6
预先根据实际路况设定排队长度阈值 maxL 。将测得的实际排队长度l传回控制系统与 maxL 进行比照,当实际排队长度l≥ maxL 时,控制系统发出指令,延长该方向上的绿灯时长。
4.可实现功能
通过摄像机持续拍摄获取实时的交通状况,调整红绿灯时长,更好地适应不同时段的路况,缓解城市的交通拥堵状况。例如每日7:00–9:00、17:30–19:00为早晚高峰时段,道路流量较大,存在以下情况:在路口某些方向车辆行驶缓慢,而另一方向情况相对较好。此时本系统通过调节绿灯时长,延长拥堵方向的放行时间,适当缩短较通畅方向的绿灯时间,达到缓解交通拥堵的情况。
5.总结
本文主要介绍了通过图像处理获取当前道路交通情况之后,即可将获取的信息进行处理以便适当调整灯时,改善道路交通状况。本方案目前仍存在一定的问题,如只考虑了单方向单车道的因素,而实际的道路情况更复杂,涉及多方向、多路口之间的关联。目前此项技术研究仍为一热点,如何协调多方向多路口之间的关联、如何提高处理效率来加强反应的实时性,都是具有研究价值和现实意义的问题。
* [1]林彬.基于图像处理的智能交通信号灯控制系统的研究[D]哈尔滨工业大学, 2011.
* [2]于万霞.基于流量预测的城市单交叉路口多相位交通信号的控制技术[D].河北工业大学, 2008.
* [3]陈再良.图像感兴趣区域提取方法[D].中南大学博士学位论文,2012
* [4]梅婧.基于图像处理及嵌入式系统的交通灯智能控制[D].东华大学, 2014
猜你喜欢
电子制作(2019年12期)2019-07-16
电子制作(2019年24期)2019-02-23
环球时报(2018-10-15)2018-10-15
儿童故事画报·发现号趣味百科(2017年9期)2018-03-13
中学物理·高中(2016年12期)2017-04-22
办公自动化(2016年18期)2016-12-17
办公自动化(2016年18期)2016-08-20
新高考·高二数学(2015年11期)2015-12-23
新高考·高二数学(2015年7期)2015-10-22
新闻前哨(2015年2期)2015-03-11