车辆安全保障系统的设计
2017-12-22 07:35作者朱彤彤蔡乙男冯芳杜青天津天狮学院信息与自动化学院
电子制作 2017年21期
作者/朱彤彤、蔡乙男、冯芳、杜青,天津天狮学院信息与自动化学院
车辆安全保障系统的设计
作者/朱彤彤、蔡乙男、冯芳、杜青,天津天狮学院信息与自动化学院
本文设计的车辆安全保障系统是针对防撞预警系统中的安全距离、车速、语音提醒以及紧急求救系统中的GPS定位、GSM发送短信等部分展开研究,通过遥控控制小车运动后,由测速模块测出车速,并根据车速计算出制动距离,再由超声波模块与前方障碍物的距离,与制动距离比较大小后,通过语音模块提醒减速慢行。在小车发生碰撞后,由GPS模块定位后,通过GSM模块将求救信息发送给预先设定好的接收对象,达到紧急求救的效果。对整个系统测试结果表明,当车距过近时,可以发出语音提醒。在驾驶员遇到突发事故后,能够及时发送求救信息,保障了驾驶员的生命安全。
STM32;GSM;GPS
序言
民防部门做过一个这样的统计,出车祸后伤势一样的重伤员,在半个小时内获救,其生存率为80%,在一个小时内得救,其生存率为40%,在一个半小时内得救,其生存率仅仅为10%以内,综上所述,及时得到救援可大大提高生存率。
研究表明,若驾驶员可以提前1秒意识到危险并采取正确措施,可以避免90%的追尾撞车事故,所以防撞预警在很大程度上可以避免交通事故。车辆安全保障系统的防撞预警和紧急求救研究可以提高事故救援的响应速度和急救效率,明显减少交通事故以及事故后的人员伤亡。
1.系统总体结构
基于防撞预警和紧急求救的车辆安全保障系统主要包括三种功能:防撞预警功能、紧急求救功能、自动呼救功能。
(1)防撞预警功能:系统通过传感器测出汽车的行驶速度,主控模块根据车速来计算行驶过程中的安全距离S,用雷达测量汽车与前方车辆或者障碍物之间的距离X,然后比较ΔL与(X–S)的值来确定是否是安全行驶,如果ΔL>0则不触发安全警报;当ΔL<0时触发安全警报,语音模块发出语音提示,此时提醒驾驶员应减速行驶,保持安全距离。
(2)紧急求救功能:在遇到紧急情况时,驾驶员可以通过一键式呼救按钮向外界进行呼救,通过系统的GPS模块进行定位,然后GSM模块把GPS的位置信息向预设对象发送求救信息以达到求救目的。如果不小心按下按钮,可以通过取消按钮进行取消,但相隔时间不能超过3s。
(3)自动呼救功能:当紧急情况发生时,驾驶员有可能会因为情绪慌张、时间紧迫、受伤昏迷等原因无法主动的按下紧急呼救按钮,这时在车身上安装的警戒装置就起作用了,不需要人为的去控制,一旦超过警戒值,它就能自动的向预设对象发送求救信息。
系统总体框架如图1所示,主要包括MCU控制器、超声波模块、语音模块、GPS模块、GSM模块等。各模块的功能如下:(1)超声波模块的功能用于测量与前方障碍物的距离。(2)语音模块的功能是发出语音提醒。(3)GPS模块的功能是接收GPS定位信息,再将定位到的信息编译成NMEA0183格式,再传送给STM32芯片。(4)GSM模块起到了人机通信的作用,STM32控制GSM模块通过短信服务中心将编辑好的求救信息与定位信息发送给预先设定好的其他用户。
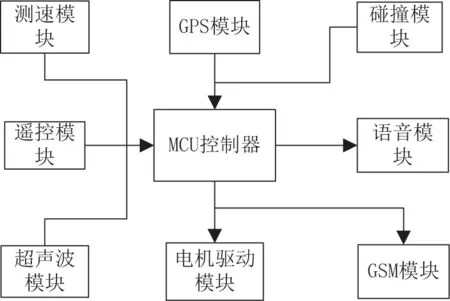
图1 系统总体框架
2.硬件设计
■2.1 防撞预警模块设计
防撞预警硬件部分采用STM32开发系统、超声波模块L298N电机驱动模块、红外遥控模块和语音模块,这些模块构成防撞预警系统,用以在制动距离大于安全距离时,提醒驾驶员减速慢行。
■2.2 车辆制动距离模型
一般情况下,驾驶员在公路上遇到突发情况,会有驾驶员反应到汽车刹车停下的这一完整过程,可将这个过程分为四个时间段:驾驶员反应时间、制动做功时间、汽车制动时间、制动结束时间,图2是汽车减速度与这四个时间段的关系。
(1)t1和t2是司机的反应时间,t1表示的是司机意识到有碰撞的危险性,其反应所花费的时间,t2表示的是司机意识到危险后,把脚移动到制动板上所消耗的时间,在这段时间内,车还在行驶的过程中,所以假设行驶的距离为s1。

图2 制动过程曲线示意图
(2)制动做功时间,所用的时间为t3和t4,t3是指刹车总泵内的活塞将刹车油往前推去并在油路中产生压力。压力经由刹车油传送到每个车轮的刹车分泵活塞,刹车分泵的活塞再推动刹车片向外,使刹车片与刹车鼓的内面发生摩擦的这一过程;车辆开始减速直到最大时,耗时为t4,设制动做功时间内车辆行驶的距离为s2。
(3)汽车制动时间t5,指的是汽车减速度最大时,汽车停下来所消耗的时间,设这段时间内行驶距离设为s3。
(4)制动结束时间t6,这个时间汽车已经制动完成,保持静止不动。
从上述描述可以得出,汽车在四个时间段内行驶的总距离s为:s=s1+s2+s3。在建立安全距离模型中,先假设汽车最初的速度为μ1、轮胎与地面的附着系数为φ、重力加速度为g、汽车最大加速度为a,并且agφ=,通过计算后制动距离为:

■2.3 紧急求救硬件设计
紧急求救硬件部分采用碰撞模块、GSM模块和GPS模块,在驾驶员发生车祸失去意识的情况下,自动将定位信息通过GSM模块发送给预设接收对象。
2.3.1 GSM模块通信设置
GSM系统的短信息被编码消息长度为140个字节,也就是一条短信的长度不得超过70个汉字,而本系统所发送的信息在70个汉字以内,符合GSM系统短消息业务的使用条件,而且操作简便,容易被人们所接受。短信服务接收和发送有关的AT命令如下所示:
(1)AT+CPMS,查询SIM卡内短消息使用状态
(2)AT+CNMI,新消息指示设置
(3)AT+CMGF,选择短消息格式
(4)AT+CSCS,编码设置
(5)AT+CSMP,设置短消息文本模式参数
(6)AT+CMGS,发送短消息
(7)AT+CMGR,读取短消息
2.3.2 GPS模块通信设置
ATK–S1216F8–BDGPS/北斗模块同外部设备的通信接口采用UART(串口)方式,输出的GPS/北斗定位数据采用NMEA–0183协议(默认),控制协议为SkyTraq协议。NMEA 0183是美国国家海洋电子协会(National Marine Electronics Association)为海用电子设备制定的标准格式。目前也已成了GPS/北斗导航设备统一的RTCM(Radio Technical Commission for Maritime services)标准协议。NMEA–0183协议采用ASCII码来传递GPS定位信息,我们称之为帧。NMEA–0183常用命令如表1所示。

表1 NMEA-0183常用命令
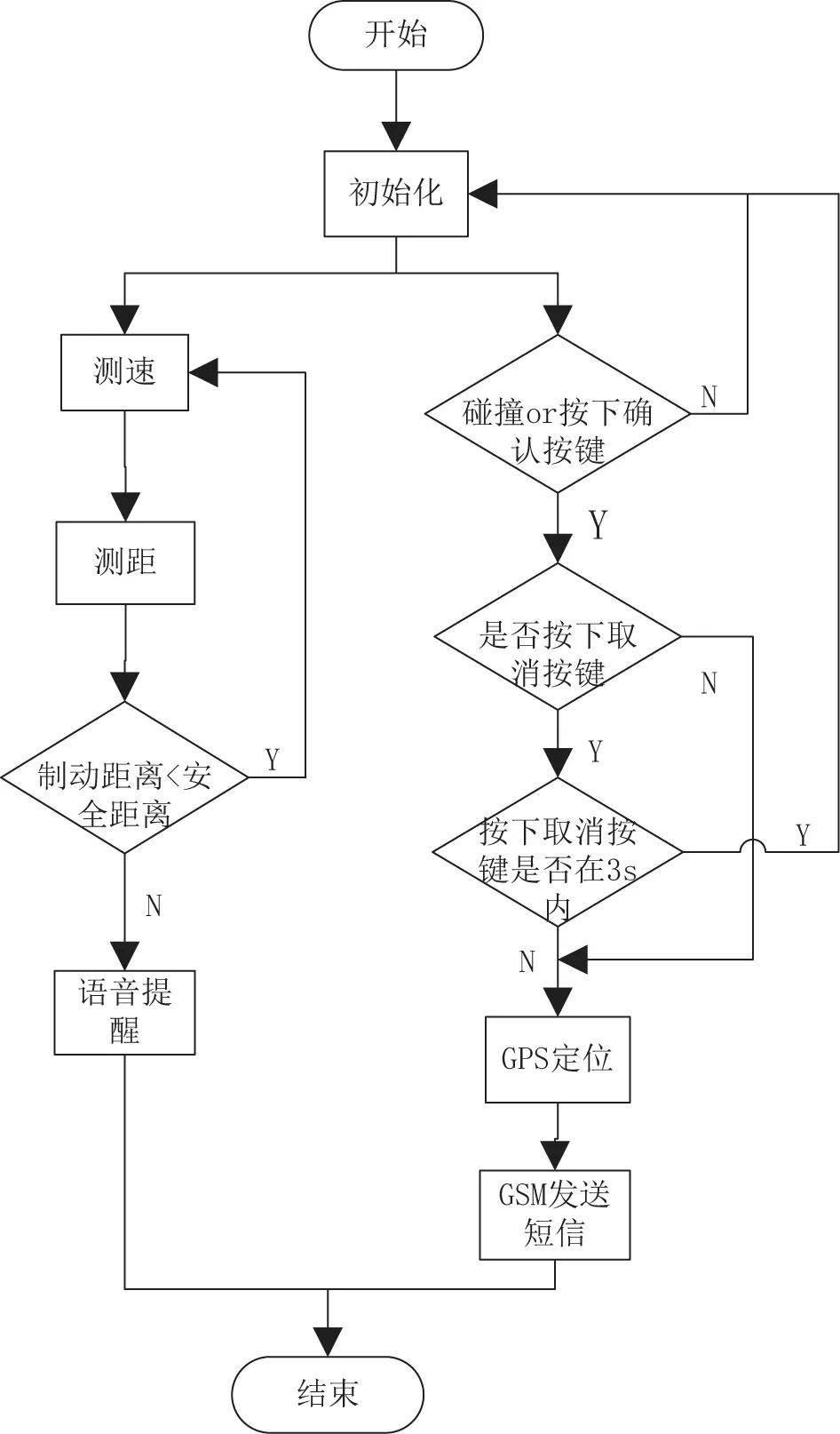
图3 程序流程图
3.系统软件设计部分
主程序是按图3所示步骤执行的,该程序分为两部分,一部分为防撞预警,先对小车进行测速,然后测出与前方障碍物的距离,判断出制动距离与安全距离的大小关系后,来决定是否语音提醒;另一部分为紧急求救,判断出小车是否碰撞或按下求救按键,在判断出取消按键是否在3s内按下,求救有效后对小车进行GPS定位,再通过GSM模块将定位信息发送给预设对象。
4.结语
本系统完成的内容:(1)可以实时检测车速,能根据车速计算出安全距离,同时检测车辆与前方障碍物间的实际距离,然后比较这两个距离的大小,当实际距离小于安全距离时,系统通过语音提醒驾驶员减速行驶;(2)当汽车在行驶过程中遇到紧急情况时,驾驶员能通过紧急呼救按钮向外界呼救;(3)在汽车发生紧急情况时,即使驾驶员没有按下紧急呼救按钮,通过装在车上的警戒装置,系统也能自动的向外界发送求救信息。同时该系统存在的缺点就是在密闭的地方GPS搜索不到卫星,所以定位不能成功;短信发送响应慢,在发生碰撞30秒后,预设短信接收对象才能够接收到求救短信。
* [1]朱丹阳.汽车避撞预警系统研究与实现[D].长春工业大学,2011.
* [2]阳路.汽车前方防撞系统中安全预警算法研究[D].四川:西南石油大学,2015.
* [3]彭立.基于GSM和GPS的运输车辆状态监管系统的设计[D]华南理工大学 2014
* [4]樊杰.基于GPS和GPRS的车载紧急报警系统的研究与设计[D].成都理工大学,2014.
* [5]卢丽敏. 基于北斗定位技术的车载监控系统设计与研究[D]福州大学,2014.
* [6]龙永. 基于STM32的车辆遇险远程报警系统设计[D].曲阜师范大学,2015.
* [7]张玉泉.汽车智能防撞报警系统设计[D].河北科技大学,2013
* [8]许洋洋,王莹.汽车智能防撞报警系统设计[J].自动化技术与应用,2014,12:95-98+102.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
阅读(快乐英语高年级)(2019年5期)2019-09-10
电子制作(2019年14期)2019-08-20
电子制作(2019年9期)2019-05-30
活力(2019年22期)2019-03-16
小说界(2018年5期)2018-11-26
电子制作(2018年12期)2018-08-01
汽车工程师(2018年1期)2018-07-13