智能农机中精准定位的研究与实现
2017-12-18 11:00黄振
网络安全与数据管理 2017年23期
黄 振
(重庆邮电大学 通信与信息工程学院,重庆 400065)
智能农机中精准定位的研究与实现
黄 振
(重庆邮电大学 通信与信息工程学院,重庆 400065)
对智能农机自动驾驶或辅助驾驶中定位方式进行改进,采用GPS/INS组合导航的方式实现精准定位。GPS/INS组合导航能克服仅采用GPS或INS进行定位的缺陷,实现优势互补,减少定位误差。研究了GPS/INS组合导航算法,并对GPS和INS数据采用卡尔曼滤波进行处理,从位置、速度、姿态三方面进行仿真对比分析,验证该算法确实能够减少定位误差,实现较精准的定位。
精准定位;自动驾驶;GPS/INS组合导航;卡尔曼滤波
0 引言
目前我国在智能农机方面的应用,主要体现在拖拉机自动或辅助驾驶系统,通过精准定位能够提高土地的利用率,提高农作物产量。因此需要对智能农机精准定位方向的研究及实现方案进行改进,寻找满足智能农机定位与远程监控系统需求的实现方案。关于智能农机导航精准定位方案的研究,一般都要求定位精度达到厘米级,主要实现方案包括[1]:采用高精度的载波相位差分(Real-Time Kinematic,RTK)GPS系统;GPS与罗盘、惯性导航组合定位方式;机器视觉导航等。已有的研究应用实例一般是通过RTK-GPS实现厘米级精准定位,达到为农机导航的目的。
惯性导航系统(Inertial Navigation System,INS)和全球定位系统(Global Positioning System,GPS)都是目前常用的导航定位系统,二者在组合导航领域使用也十分广泛[2]。正因为如此,GPS和INS二者共同连带的组合模式是当今研究领域中较为理想的选择。
GPS/INS组合导航系统,能对GPS或INS单独使用时的缺陷进行弥补。GPS单独使用时,会出现信号遮挡或干扰致使接收不到定位信息,而此时INS可以接收信息;INS单独使用时,累积误差随工作时间增加而增大,而GPS的稳定性可以校正累积误差[3]。
本文研究一种在智能农机上应用的精准定位系统,即GPS/INS组合导航系统,通过滤波算法处理融合数据以减少误差获取较高的定位精度,用来解决无人驾驶和辅助驾驶中农机的导航与精准定位问题。对算法流程和处理过程进行分析,并通过改进优化相关算法,进行仿真优化与测试,验证定位精度是否提高,具有一定的理论价值和实际应用价值。
1 GPS/INS组合导航系统方案
1.1 基本方案
基本的GPS/INS组合导航方案如图1所示,通过采集GPS数据和INS数据,进行数据融合处理。数据融合算法采用卡尔曼滤波(Kalman filtering),卡尔曼滤波是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法[4]。考虑到智能农机系统为非线性系统,可在实际处理中近似为线性系统,再用相关滤波算法进行处理计算。
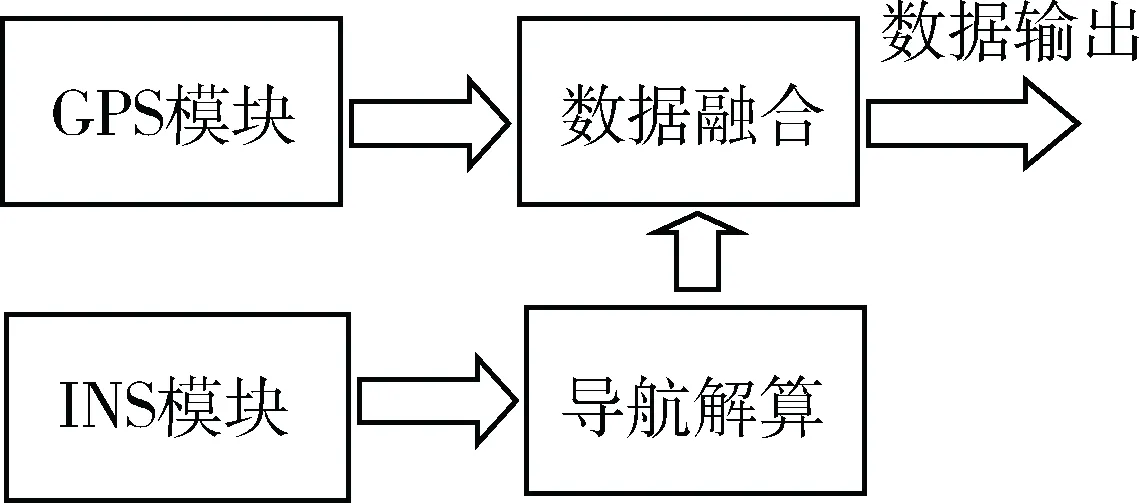
图1 GPS/INS组合导航基本方案
基本方案中数据处理从GPS模块获取经纬度等数据,从INS模块的加速度计、陀螺仪等传感器获取角速度、加速度信息,然后经导航结算输出惯性导航数据信息;把GPS和INS数据通过数据融合进行处理,通过滤波计算得到高精度定位数据输出。根据当前硬件条件情况,首先对GPS/INS组合导航算法方面进行研究,目的是满足GPS盲区的精准定位。
GPS/INS组合导航采用的是松组合,即以INS为主GPS为辅的方案。在GPS工作时,GPS数据用于导航信息的最优估计,并用最优估计结果反馈修正INS,使其保持高精度;在GPS无信号时,INS单独工作,输出惯性导航解。目前这种松组合模式已经在国产组合导航系统中得到了广泛应用,也适用于智能农机精准定位[5]。
1.2 数学建模
GPS/INS组合导航系统实际上是根据采集的外部信息,参照某种方式进行信息和数据的融合,进行参数最优估计。在智能农机中GPS/INS由于农机作业环境的特殊性,运动模型较为简单,在整体程序算法的设计上,使用GPS接收机的数据对INS的导航定位误差进行修正,以实现精准定位。
考虑到采用卡尔曼滤波进行数据处理,对导航参数误差进行估计,所以使用间接法进行数据融合。间接法系统状态误差均为小量,而且方程线性化带来的误差较小,便于工程实现,滤波器故障不会影响INS的工作[6]。如图2所示为使用卡尔曼滤波间接法输出校正。

1.3 状态方程
GPS/INS组合导航系统的状态系统包括:INS器件误差、平台误差方程、位置和速度误差方程。在智能农机硬件平台上,对GPS和INS性能与误差源进行分析,为便于实现,卡尔曼滤波器取组合导航系统各状态的误差量作为滤波器的状态变量。
本研究只考虑随机误差,GPS/INS组合导航系统各状态的误差量包括3个平台误差角、3个导航系统的速度误差、3个位置误差、3个陀螺仪随机漂移和3个加速度计零偏误差,一共15个状态估计参数。
1.3.1陀螺仪随机漂移误差模型
陀螺仪随机漂移的误差模型一般取随机常数、一阶马尔科夫过程和白噪声的组合。即:
ε=εb+εr+ωg
(1)
其中,εb为随机常数,仿真陀螺仪的常值漂移;εr为一阶马尔科夫过程,仿真陀螺仪的时间相关漂移;ωg为白噪声,仿真陀螺仪的量测白噪声。
为方便模型建立,假定所有的陀螺漂移误差模型相同,均为:

(2)
(3)
其中,Tg为相关时间。
1.3.2加速度计误差模型
加速度计的误差模型考虑为一阶马尔科夫过程,在本研究中认为三轴加速度计误差模型相同,均为:
(4)
其中,Ta为相关时间。
1.3.3GPS误差和状态方程
GPS的位置和速度误差通常是时间相关的,在位置、速度组合模式中误差体现为量测噪声。量测噪声时间相关且是有色噪声,建模不易而且不能用状态扩充法处理,所以可采取增加卡尔曼滤波器的迭代周期或者采用分散滤波器理论来设计滤波器。
将误差方程综合在一起,系统状态方程为[6]:

(5)
式中,X(t)为系统状态向量,W(t)为系统噪声向量,F(t)为系统矩阵,G(t)为系统噪声矩阵。
1.4 量测方程
本研究中GPS/INS组合导航采用的是松组合方式,在松组合模型中采用INS和GPS输出的位置、速度之差作为观测量。位置测量值是INS输出的经纬度、高度信息和GPS输出相应信息的差值,速度测量值是INS输出的东向、北向速度和GPS输出相应信息的差值。
将位置、速度量测方程合并,得出该系统的量测方程为[7]:
Z(t)=H(t)X(t)+V(t)
(6)
式中,H(t)是量测矩阵,V(t)是量测噪声。
2 系统仿真及结果分析
本研究硬件实现平台是基于团队研究的智能车辆控制器项目,智能车辆控制器硬件基于高通处理器平台,搭载Android操作系统,外接GPS接收机,采用GPS/INS组合导航系统,再通过卡尔曼滤波处理获取高定位精度。实验时可将智能车辆控制器连到拖拉机上采集定位信息和其他相关信息并上传到服务器。
本次仿真将测试程序下载到智能车辆控制器,在实验室附近一条水泥路进行匀速运动,主要采集定位模块相关数据。获取数据后进行仿真误差分析,对位置、速度、姿态误差进行经GPS/INS组合导航算法处理前后的分析对比。在MATLAB仿真时,假定陀螺仪和加速度计的误差统计特性一致,并且随机噪声由随机常值和白噪声组成。设定仿真时间为100 s,仿真结果如图3~图5所示。

图3 位置误差对比图

图4 速度误差对比图
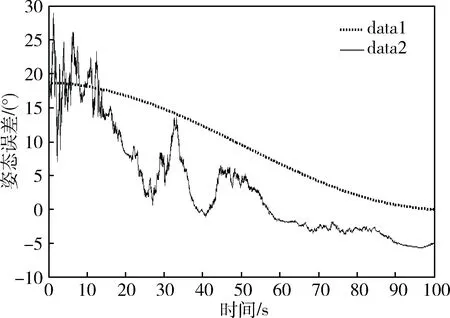
图5 姿态误差对比图
从仿真结果(data1是GPS/INS组合导航算法处理前误差,data2是处理后误差)可以看出,经过GPS/INS组合导航卡尔曼滤波处理的位置、速度、姿态误差都有减少,能够提高定位精度。位置误差如果不进行滤波处理会随着时间增加误差变大,经该算法处理后误差趋于平稳,误差处理效果较好;速度误差也一直存在并有增大的趋势,处理效果开始有些不稳定,之后处理效果变好;姿态误差处理效果一般,后期算法仍需改进。从仿真结果来看,该算法有一定的容错能力,系统的可靠性和精度有了一定的提高。
3 结论
本文介绍了我国在精准农业实现方面主要采取的措施,以及GPS/INS在智能农机精准定位中的优势。提出了一种应用在智能农机上的GPS/INS组合导航系统,并对其数学模型和状态方程、量测方程进行了分析,最后对系统进行了仿真验证。GPS/INS组合导航确实能够提高导航定位精度并应用在智能农机上,该算法对利用GPS和INS两个非相似导航系统提供的互补信息来提高定位的可靠性和精度,后期仍需对该算法进行优化,争取实现误差在厘米级的精准定位。
[1] 胡静涛, 高雷, 白晓平,等. 农业机械自动导航技术研究进展[J]. 农业工程学报, 2015, 31(10):1-10.
[2] YANG Y, FARRELL J A. Magnetometer and differential carrier phase GPS-aided INS for advanced vehicle control[J]. IEEE Transactions on Robotics & Automation, 2003, 19(2):269-282.
[3] 许丽佳, 陈阳舟, 崔平远. GPS/INS组合导航系统中的信息融合算法研究[J]. 计算机仿真, 2004, 21(5):20-23.
[4] WELCH G,BISHOP G.An introduction to the Kalman filter[D]. University of North Carolina at Chapel Hill, 1995.
[5] 周星伶. GPS/INS组合导航系统松、紧耦合性能比较[J]. 航空电子技术, 2007, 38(4):1-6.
[6] 秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社, 2015.
[7] 吴凤柱, 何矞, 焦旭,等. GPS/SINS紧组合导航系统信息融合技术研究[J]. 电子技术应用, 2013, 39(2):67-69.
Research and implementation of precise positioning in intelligent agricultural machinery
Huang Zhen
(College of Communication and Information Engineering, Chongqing University of Posts andTelecommunications, Chongqing 400065, China)
To improve the positioning mode of automatic and auxiliary driving of intelligent agricultural machinery, we adopted the Global Positioning System(GPS)/Inertial Navigation System(INS) integrated navigation to achieve accurate positioning.GPS/INS integrated navigation can overcome the defects of positioning only by GPS or INS, complement each other and reduce positioning errors.In this paper, we studied the algorithm of GPS/INS integrated navigation and using Kalman filter to process GPS/INS data.The simulation results from three aspects of position, speed and attitude show that the algorithm can reduce the positioning error and achieve accurate positioning.
precise positioning; automatic drive; GPS/INS integrated navigation; Kalman filtering
TP273
A
10.19358/j.issn.1674- 7720.2017.23.007
黄振.智能农机中精准定位的研究与实现[J].微型机与应用,2017,36(23):25-27.
2017-06-14)
黄振(1993- ),通信作者,男,硕士研究生,主要研究方向:组合导航算法和精准定位。E-mail:1176199403@qq.com。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
四川农业与农机(2022年4期)2022-08-31
今日农业(2021年4期)2021-11-27
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
中国化肥信息(2019年5期)2019-06-25
电子制作(2019年23期)2019-02-23
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09