舰机两翼侧出前向协同巡逻护航反潜模型及仿真*
2017-12-18 08:14:19高青伟
指挥控制与仿真 2017年6期
吴 芳, 高青伟, 吴 铭
(海军航空大学, 山东 烟台 264001)
舰机两翼侧出前向协同巡逻护航反潜模型及仿真*
吴 芳, 高青伟, 吴 铭
(海军航空大学, 山东 烟台 264001)
为了应对敌潜艇对舰艇编队航渡过程中的威胁,可由舰载反潜直升机与反潜水面舰艇组成反潜巡逻线对我方舰艇编队提供巡逻反潜防护。主要研究了一种新型的两翼前出型舰机前向协同巡逻反潜方法,建立了反潜直升机和水面舰艇的初始集结点的位置模型、协同反潜巡逻线有效宽度模型、反潜直升机和水面舰艇的搜潜动作协同模型,并通过仿真对该系列模型进行验证。
舰艇编队; 护航反潜; 舰机协同
在护航过程中为了应对敌潜艇对舰艇编队的威胁,由舰载反潜直升机与反潜水面舰艇进行有效协同,组成反潜巡逻线对我方舰艇编队提供巡逻反潜防护。一般根据上级指示或综合判断敌潜艇的可能来袭方向,将巡逻反潜分为前向巡逻反潜防护、侧翼巡逻反潜防护、后方巡逻反潜防护以及全向巡逻反潜防护。舰艇编队在航渡过程中,敌潜艇的威胁通常来自舰艇编队的前方。因此,前方反潜防护是护航反潜中最常用、最主要的护航反潜方法。
前方反潜防护方法为使用反潜直升机和反潜水面舰艇,在编队前方建立反潜巡逻线,对舰艇编队进行反潜防护。水面舰艇由于续航能力强,能持续进行探测,因此反潜巡逻线的中间部分也就是编队受到威胁最大的正前方,应由反潜水面舰艇组成;反潜直升机机动灵活,应处于反潜巡逻线的两端部分来增加反潜防护宽度。本文主要研究了一种新型的两翼前出型舰机前向协同巡逻反潜方法,建立了反潜直升机和水面舰艇的初始集结点的位置模型、协同反潜巡逻线有效宽度模型、反潜直升机和水面舰艇的搜潜动作协同模型,并通过仿真对该系列模型进行验证。
1 两翼侧出型舰机协同反潜搜索模型
两翼前出型舰机协同搜索方法中反潜水面舰艇两侧的舰载反潜直升机与反潜水面舰艇不呈直线排列,而是适当前出,构成“V”字形的搜索阵型,以增加反潜纵深。如图1所示。
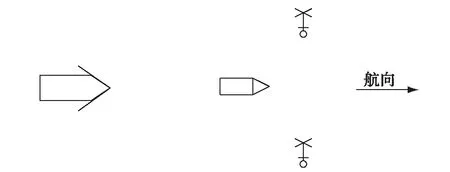
图1 两翼前出型舰机协同搜索方法示意图
在反潜行动之前,各反潜兵力首先要到达指定站位。设舰艇编队中心点的初始坐标为(x编,y编),编队最前方位置坐标为(x前,y前),反潜水面舰艇的初始坐标为(x舰,y舰),两架反潜直升机的初始坐标分别为(x机1,y机1)和(x机2,y机2)。其中,依据编队兵力编成情况,由编组指挥人员确定编队最前方位置坐标。
为了充分保证舰艇编队前方的安全,反潜巡逻线必须建立在编队前方敌潜艇攻击武器(一般为鱼雷)最大射程r潜之外,因为,反潜水面舰艇的初始集结位置为
(1)
为在舰艇编队前方构成一条完整的反潜巡逻线,水面舰艇与反潜直升机之间除了在编队航行方向之外,在垂直航行方向上的距离应为两者声呐有效作用距离之和。设舰载声呐的有效探测距离为D舰,机载声呐的有效探测距离为D机,单架反潜直升机曲折运动的防护宽度为L机,那么以巡逻线远端为起始点,反潜直升机的初始集结位置为
(2)
如果反潜水面舰艇兵力比较充足,且舰艇编队前方敌潜艇威胁较大,可同时使用两艘反潜水面舰艇与两架舰载反潜直升机共同建立反潜巡逻线。如果两艘反潜水面舰艇舰载声呐的有效探测距离相同,都为D舰,则这两艘反潜水面舰艇之间的间距应为2D舰。如图2所示。
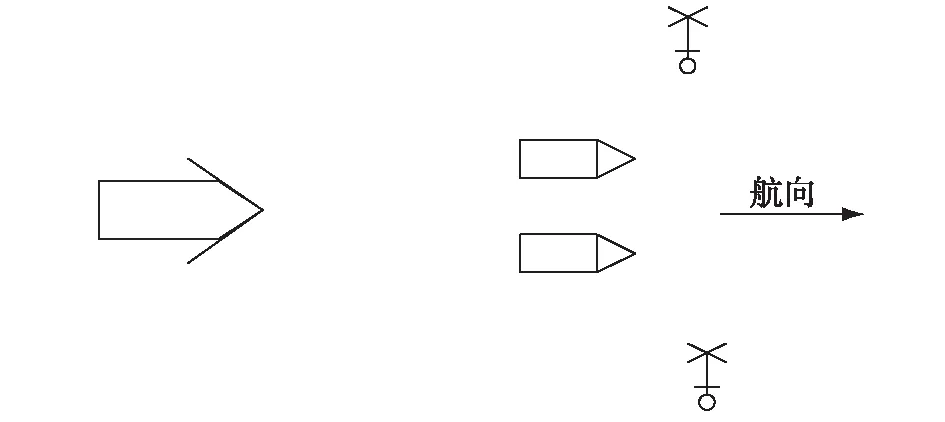
图2 双舰双机两翼前出型协同搜索方法示意图
设两艘水面舰艇的初始坐标分别为(x舰1,y舰1)和(x舰2,y舰2),则有
(3)
以巡逻线远端为起始点,反潜直升机初始集结位置为
(4)
前向反潜巡逻线的宽度l前是舰机协同前向防护方法反潜效能最直接的体现,两翼侧出反潜防护线宽度l前为
(5)
2 兵力动作协同模型
反潜直升机使用吊放声呐进行搜索时,其搜索速度与舰艇编队的航行速度不一致,为了保证舰载反潜直升机的搜索运动与舰艇编队运动之间保持同步,舰载反潜直升机一般采用曲折运动搜索法。如图3所示。

图3 舰载反潜直升机曲折运动搜索法示意图
各反潜兵力到达指定站位后,开始进行动态同步搜潜过程。在航渡过程中,可认为一定时间内舰艇编队的航行属于匀速直线运动,设舰艇编队航速为V编,那么在t时刻编队中心位置的坐标(xt编,yt编)满足如下关系:
(6)
设反潜水面舰艇的航速为V舰,方向与编队保持一致,在t时刻反潜舰艇位置的坐标为(xt编,yt编),则有
(7)
其中,反潜水面舰艇要实现对舰艇编队的同步反潜,因此水面舰艇速度V舰应与编队航行速度V编相等,即
V舰=V编
(8)
若进行双舰反潜,则有
(9)
直升机曲折运动的控制过程比较复杂,应根据对战场态势分析选择合适的探测间距d,而每条直线上的探测点数n以及转折角Δ转折,可以根据以下关系和限制条件通过计算得出。
首先,直升机曲折运动形成防护线的宽度L机必须大于上级要求的防护宽度L敌,根据图3中几何关系有
(10)
其中,D潜为艇载声呐的有效探测距离。
进一步整理得:
L机=[(n-1)d+2D机]·cosΔ转折/2≥L敌
(11)
其次,要保证能够实现同步搜潜,当一个同步周期结束时,根据图中几何关系可将舰艇编队的航行时间t编表示为
t编=2L·sin(Δ转折/2)/V编=2[(n-1)d+2D机]·sin(Δ转折/2)/V编
(12)
而舰载反潜直升机的搜索周期t周为:
t周=(2n-1)(t放+t测+t收+d/V直)
(13)
即
2[(n-1)d+2D机]·sin(Δ转折/2)/V编(2n-1)(t放+t测+t收+d/V直)
(14)
因为反潜巡逻机吊放点数n应为正整数,则:
(15)
通过对上式求解,可计算出探测点数n以及转折角Δ转折。
两机从初始站位(x机1,y机1)和(x机2,y机2)处开始作曲折运动,以编队左侧直升机为例,具体控制过程如下流程框图4所示。
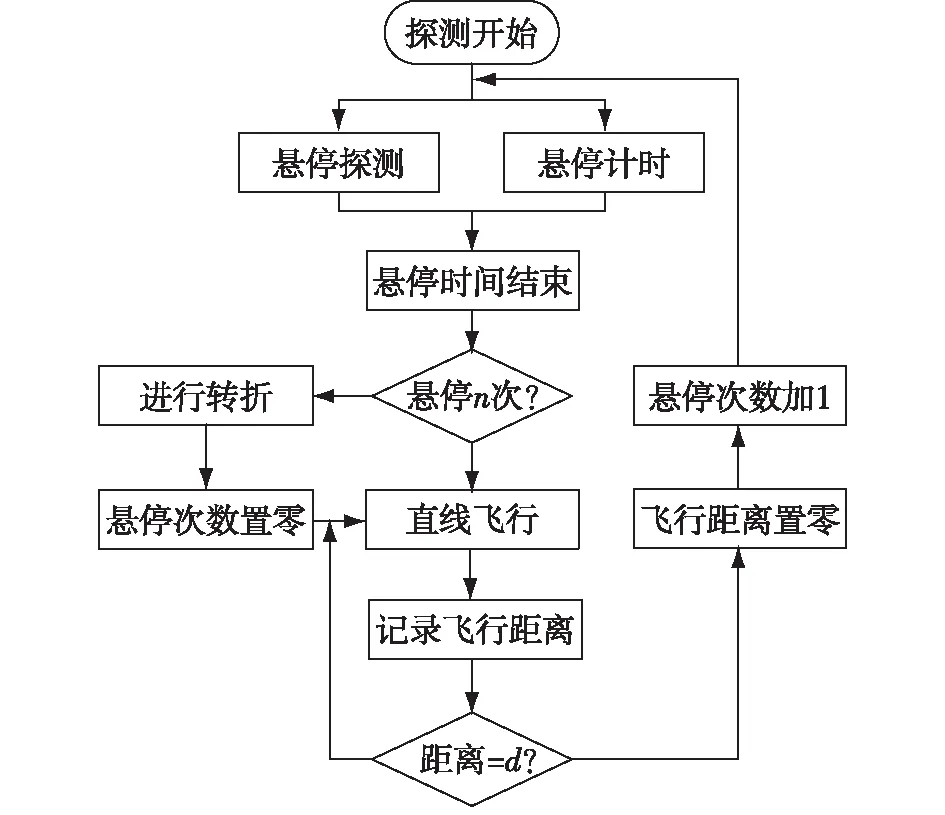
图4 反潜直升机曲折运动控制流程图
其中,假设上一悬停点的坐标为(x0,y0),则直线飞行阶段的坐标关系表示为
(16)
设直升机的悬停时间为t悬,则有:
t悬=t周-d/V直
(17)
循环此过程,直至搜索结束直升机返航。
3 界面动态仿真演示
为了进一步验证上述模型,对舰机两翼侧出型前向协同反潜方法进行仿真分析。所需要输入的战场环境参数主要包括:反潜直升机速度V直、舰艇编队的速度V编、反潜直升机探测有效范围D机、反潜舰艇的有效探测范围D舰、吊声探测周期t周期、探测点的间距d、敌潜艇武器的最大射程r潜以及上级要求的反潜防护宽度l敌。图5为舰机两翼侧出型前向协同反潜方法人机交互界面。图中,左侧为仿真参数输入和输出部分,右侧为舰机协同搜潜图形动态演示部分。通过仿真计算可以得到:反潜直升机曲折运动时的转折角Δ转折和曲折运动时每条直线上的探测点数目n,以及前向防护宽度l前。
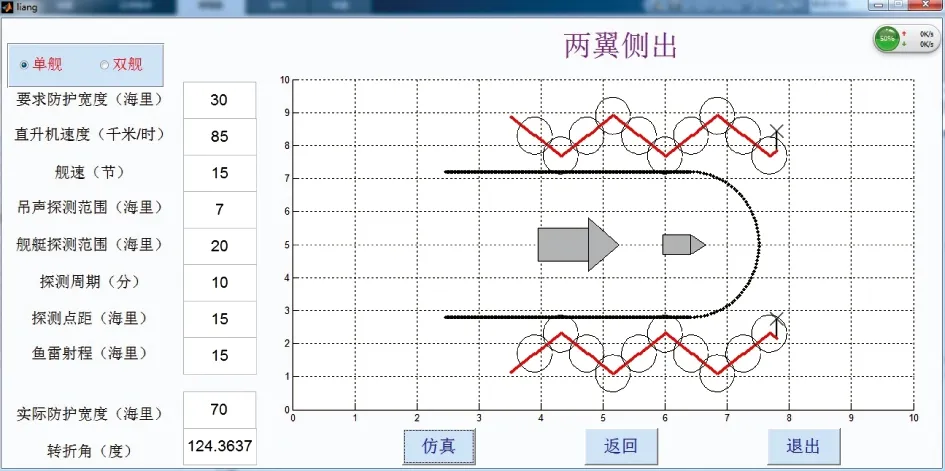
图5 前向防护模型演示画面
4 结束语
舰载反潜直升机与编队内的反潜水面舰艇都是航母编队的主要反潜兵力,共同承担航母编队的反潜防御作战任务。本文主要研究了一种新型的两翼前出型舰载反潜直升机与反潜水面舰艇前向协同巡逻反潜方法,建立了反潜直升机和水面舰艇的初始集结点的位置模型、协同反潜巡逻线有效宽度模型、反潜直升机和水面舰艇的搜潜动作协同模型,并通过仿真对该系列模型进行验证。
[1] 张磊,朱琳,顾颀. 舰艇编队舰机协同反潜警戒模型研究[J].指挥控制与仿真,2012,34(2):18-22.
[2] 王在刚. 驱护舰编队舰机协同对潜防御研究[D].大连:海军大连舰艇学院,1999.
[3] 王慎,石章松,苏楠. 舰机协同搜潜直升机编队配置优化研究[J].舰船科学技术,2011,33(2):102-104.
[4] Fotrest R N. Some localization notes on search,detection and modeling[R]. ADA135938: 334-336.
[5] 谭安胜. 水面舰艇编队作战运筹分析[M]. 北京: 国防工业出版社, 2009:204-207.
[6] 沈治河,朴成日. 基于作战行动航母编队兵力配置[J]. 舰船科学技术,2014,36(3):131-135.
[7] 朴成日,沈治河. 基于作战协同航母编队兵力配置方法[J]. 指挥控制与仿真,2013,35(4):32-35.
Models and Simulations for the Ship-Heli Cooperating of Forward Patrol and Anti-submarine of the Two-wing Warships
WU Fang, GAO Qing-wei, WU Ming
(Naval Aeronautical and Astronautical University, YanTai 264001, China)
In order to deal with the enemy submarine fleet during navigation threats, may consist of shipboard anti-submarine helicopters and anti-submarine surface ship anti-submarine patrol line on our fleet to provide anti-submarine protection. In this paper, we study a new approach to the forward patrol and anti-submarine of the two-wing warships, and establish the position model of the initial assembly point of the anti-submarine helicopters and surface ships, the effective width model of the anti-submarine patrol line, the anti-submarine helicopters and the surface ships. And the simulation model is validated by simulation.
naval ship formation; anti-submarine escort; surface ship and helicopter coordination
1673-3819(2017)06-0035-03
E926.3; E925.6
A
10.3969/j.issn.1673-3819.2017.06.008
2017-05-24
2017-07-27
国家自然科学基金项目资助(61271444)
吴 芳(1981-),女,辽宁葫芦岛人,博士、讲师,研究方向为航空反潜。高青伟(1978-),男,博士,讲师。吴 铭(1976-),男,硕士,副教授。
猜你喜欢
军事文摘(2023年1期)2023-02-03 05:05:26
课程教育研究(2021年14期)2021-04-13 00:08:59
河北水利(2021年4期)2021-01-06 19:09:28
法学(2020年11期)2020-02-25 04:35:48
大江南北(2019年5期)2019-11-12 19:03:53
中国军转民(2018年1期)2018-06-08 05:53:23
兵器知识(2017年10期)2017-10-19 19:34:33
军事运筹与系统工程(2017年1期)2017-07-31 18:19:00
知识经济·中国直销(2016年5期)2016-11-07 09:35:07
中国舰船研究(2016年3期)2016-09-02 02:36:30