舰炮武器系统的无人机目标侦察模型与误差分析
2017-12-18 08:14朱惠民王航宇孙世岩
指挥控制与仿真 2017年6期
朱惠民, 王航宇, 孙世岩
(海军工程大学, 湖北 武汉 430033)
舰炮武器系统的无人机目标侦察模型与误差分析
朱惠民, 王航宇, 孙世岩
(海军工程大学, 湖北 武汉 430033)
在单无人机纯方位定位基础上,建立了一种结合CCD(Charge-coupled Device)相机和激光成像雷达的单无人机目标定位模型,以可信的地面参照物为中继点,通过坐标转换得到舰炮射击时所需的目标位置参数。通过大量的计算和仿真,从无人机与目标之间的距离、方向角、高低角的方面对定位时产生的误差进行对比,得到了所提方案较三角几何定位的传统单无人机目标定位方法产生的误差范围更小的结论。
无人机; 目标定位; 定位误差; 便携式火控终端; 火力支援作战
在未来两栖作战中,精确的目标指示信息配合信息化炮弹,将极大提升海军水面舰艇的作战能力。在战场环境变化更快、影响因素更多的情况下,由2-5人组成的战术分队,携带小型目标定位装置,就可以完成对战场临时目标的定位,尤其是突然出现的小型、快速的目标/目标群,并能够迅速召唤舰炮制导炮弹的火力打击。美军在伊拉克战争中多次使用“龙眼”小型无人机对敌方区域进行隐蔽侦察,为己方部队提供可靠的目标探测支援,减少了侦察兵的伤亡[1-3]。
因而如何利用无人飞行平台获取高精度的目标位置信息,对水面舰艇能否及时对目标实施火力打击至关重要。尤其当卫星通信条件恶劣,无人机GPS定位信号弱的情况下[4-5],如何解决目标精确定位的问题,是本文研究的重点。模拟RGB-D(RGB-Depth)图像传感器的成像原理,在小型无人机光电吊舱内集成共轴的CCD(Charge-coupled Device)相机和测量距离更远的激光成像雷达,从而获取目标的位置信息。关于单无人机目标定位方法主要是纯方位定位,通过最小二乘无源定位的方法确定目标位置[6-15],本文在此基础上建立无人机侦察模型,对无人机定位过程中的误差进行分析,为CCD相机与激光成像雷达相结合的小型单无人平台目标定位的技术可行性提供理论支撑,为满足未来两栖作战样式的改变提供依据。
1 单无人平台侦察定位模型
传统的单无人机携带光电吊舱进行目标定位过程,主要是从不同的角度对目标所在区域进行扫描,计算无人机在不同位置时与目标之间的角度,通过运动学原理进行无源定位。但该方法没有考虑到目标与飞行平台之间的运动关系,而且对无人机自定位的精度有较高的要求。本文建立的定位模型,主要是对目标进行瞬时的捕获,并通过图像中一些显著的地表参照物进行坐标系之间的转换,最终得到目标与火炮发射舰之间的坐标关系,提供舰炮武器系统所需的射击诸元。
1.1 坐标系描述
单无人平台目标定位过程中涉及多个坐标系,主要包括:
1)以无人机质心为坐标系原点,y轴指向无人机位移的水平方向,z轴指向天顶,x与z轴和y轴构成右手直角坐标系,建立无人机航迹坐标系CV;
2)与无人机航迹坐标系共原点,坐标系旋转(ψ,θ,φ)得到无人机坐标系CV′;
3)以参照物质心为坐标原点,z轴垂直原点指向天顶,y轴沿原点的经线的切线指北,x轴沿原点纬线切线指东,建立地理参考系CW。
本文所涉及地理参考系原点主要为火炮发射舰或地标参照物。
1.2 坐标系转换
无人飞行平台、目标以及地面参考坐标的位置关系如图1所示。

图1 单无人平台侦察定位坐标系
图中,OV表示CV的原点,OV′表示CV′的原点,OP表示目标,OF表示以火炮发射舰,OW表示地面参照点,其经纬度信息可通过卫星遥感地图或炮兵地图进行确认。(ψ,θ,φ)表示无人平台的偏航角、俯仰角、横滚角。其中,ψ偏东方为正,偏西方为负;θ在水平面以上为正,水平面以下为负;往右横滚则φ为正,往左横滚则φ为负。
目标在火炮发射舰舰艇参考系下的位置可以通过无人机作为中继,并通过地图上的已知坐标转换得到:
(1)
MVP(目标在CV′中的相对位置)和MVW(地图上已知点在CV′中的相对位置,即CW的原点OW)通过无人机传感器探测得到,MFW(OW在CF中的坐标)也可在战前侦察计算得到。
2 无人机侦察定位模型误差分析
激光成像雷达与电视图像相结合的目标探测原理如图2所示[16-18]。

图2 激光成像雷达—电视图像探测原理
图中P表示目标实际位置,xyz-O坐标系表示无人机航迹坐标系CV。uv-o坐标系表示激光成像雷达生成的深度图像坐标系,o为坐标系原点,位于图像中心,p点则表示目标在深度图像中的位置,可以通过共轴的电视图像画面得到其像素坐标。目标P相对于探测平台的直角坐标系坐标MVP(xVP,yVP,εVP)可以表示为
(2)

(3)

同理,地表参照物相对于载机平台的坐标可以表示为
(4)
式中,dVW表示目标距离,可通过激光成像雷达测得。BVW、εVW分别表示目标与无人机之间的方向角和高低角,且
(5)

2.1 载机与目标之间的方向角和高低角
影响定位精度的还有传感器指向角度及其误差。设(αS,βS)表示传感器的横滚和纵摇,(ΔαS,ΔβS)表示其横滚误差和纵摇误差,传感器指向载机前进方向的右边为正,载机与相关坐标点的位置关系如图3所示,图3(a)为顶视图,用于方位角的计算,图3(b)为左视图,用于高低角的计算,其中,BVW、εVW表示地面参照物相对于载机平台的高低角和方位角。

图3 载机与地面目标的位置关系
由上图可知地面参照点相对于载机平台的方向角和高低角为
(6)
目标相对于载机平台的方向角和高低角为
(7)
2.2 载机平台的旋转与位移
无人机的移动通常是一个累积的过程,在无人机GPS不可用或者GPS定位精度不高的情况下,可以根据飞行记录文件对其进行位姿估计。
多旋翼无人机通过远程遥控进行三轴坐标系的加速度运动,如图4所示,载机平台的旋转向量可以分别分解为X,Y和Z轴方向上的转动向量,图中aX(t0)、aY(t0)和aZ(t0)表示各个方向上在t0的加速度向量大小,经过ti时间后,各加速度向量方向旋转至aX(ti)、aY(ti)和aZ(ti),t0时刻和ti时刻各方向上的加速度大小相同。RVX(t0,ti)、RVY(t0,ti)和RVZ(t0,ti)表示无人机平台在(t0,ti)内X、Y和Z轴的转动向量(0≤i≤j),g表示重力加速度。

图4 载机平台旋转向量分解
无人机在X轴、Y轴和Z轴上的所受力的作用,即无人机在左右横移、前进/后退、爬升/降落的瞬时速度,可以表示为各方向上加速度在(t0,tj)时间内的累积,分别为VX、VY和VZ,可表示为
(8)

(9)
根据式(9)可计算出俯仰角速度Δθi和横滚角速度Δφi为
(10)
将式(10)代入式(9)的aZ中,得到无人机爬升/降落的加速度aZ为
aZ=g·cos(arcsin(aY/g))·cos(-arcsin(aX/g))
(11)
与式(9)联立,可计算得到更加精确的俯仰角速度Δθi和横滚角速度Δφi
(12)
其中aX和aY的符号根据无人机操控员对遥控器的控制决定。无人机在进行航向角变化时所受到的力为X轴、Y轴方向上的合力,因此转向的加速度为aψ为
(13)
因此,转向角速度Δψi为

(14)
在(t0,tj)时间内姿态角的变化量(Δψ,Δθ,Δφ)为
(15)
无人机在Z轴的转动可以通过X轴和Y轴方向上的转动体现,因此,其向量可表示为
(16)
无人机的位移向量可以通过如下的数学模型进行描述:
(17)
其中ΔTV表示气流对无人机的影响。
3 目标定位精度影响因素分析
假定初始条件:目标为敌方一辆装甲车,无人机距离火炮发射舰约40km,距地面高度为600m,位于火炮发射舰北偏东60°。当无人机航向角为220°时,摄像头的横滚和纵摇均为0°,捕获到目标与地面参考物在同一视场角内,初始姿态角为(ψVP0,θVP0,φVP0),地面参考物在炮兵地图上标注海拔为1100m。无人机GPS定位误差设为100m,姿态陀螺仪的测量误差在1°以内。激光成像雷达探测误差为1%[19-21]。在本人之前所做的工作中[22],对目标定位模型进行了仿真验算,通过1000次的独立仿真计算后得到的无人机坐标平均值为(34604,19863,551),对无人机定位误差为1210m*698m*654m。目标点坐标平均值为(33504,18790,98),对目标的定位误差为1202m*680m*631m,远不能满足舰炮武器系统实施打击所需的目标指示精度。本文建立的目标定位模型,通过计算得到目标点的平均坐标为(32153,16801,-1),在x-y-z轴方向上的误差范围是332m*175m*188m。与三角几何定位、测向交叉定位、最小二乘无源定位等单机定位方法相比,目标定位精度有了较大提高,在此不再重复计算。
为了确定本文所建立的目标定位模型的可持续性,下面在典型情况假定下,对目标定位精度的影响因素进行分析。
3.1 无人机与目标的距离对目标定位精度的影响
假设无人机始终以-40°左右的目标高低角、10°左右的目标方向角对目标进行捕获定位,无人机与目标的直线距离dVP在200m-900m的范围内进行变化,如图5所示。根据本文提出的目标定位模型,利用Matlab软件计算,并和传统意义上的单无人机目标定位方法结果进行比较。结果如图6所示。

图5 无人机与目标的距离变化示意图
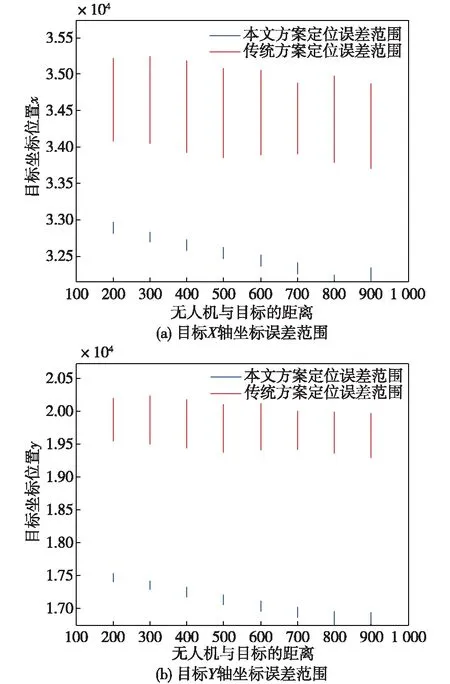
图6 距离对定位精度的影响
计算结果表明,本文建立的单无人机目标定位体系,与传统的通过GPS进行自定位的无人机目标定位体系相比,在目标定位误差上,有了明显的降低,通过计算可得,当无人机与目标之间的距离在200m-300m的范围时,目标综合定位误差最小,但考虑实际应用,无人机距离太近,易被敌方发现,因此,在大于400m的范围以外进行侦察,当无人机与目标直线距离在500m-600m左右时,能够达到相对较小的目标定位误差,这与当前国内外已经研发的主流激光传感器、电视图像传感器的探测性能也相符。且当无人机与目标距离为900m时,误差范围为182m*200m*202m,当探测距离缩小为200m时,定位误差范围为147m*125m*187m,目标定位精度误差增加了35m*75m*15m,探测精度的变化范围对舰炮制导炮弹超视距打击作战而言,仍然在可控范围内,对前沿侦察人员的操作使用也更加灵活。
3.2 无人机探测角度对目标定位误差的影响
上文对无人机与目标的距离dVP进行调整后,对目标定位精度进行计算,得到目标定位误差范围最小的探测距离为500m≤dVP≤600m,设dVP=600m,在此基础上,改变无人机上传感器角度,即改变目标与无人机之间的高低角εVP和方向角BVP,如图7和图8所示。
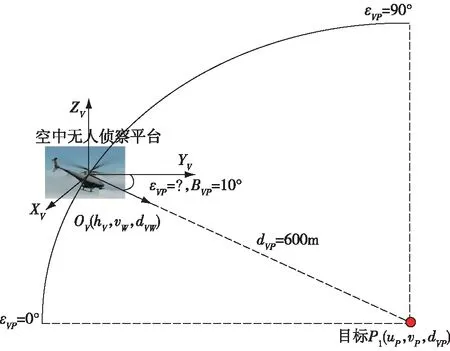
图7 无人机与目标的高低角
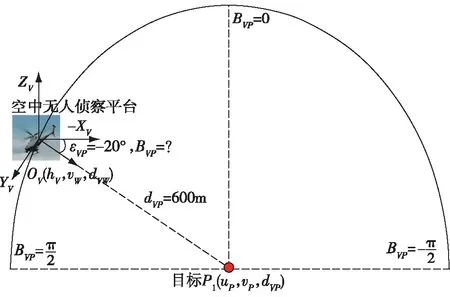
图8 无人机与目标的方位角
图7表示对无人机与目标之间的高低角εVP进行改变,目标P1所在位置参数未知,我方前哨侦察人员通过小型无人机对敌方区域进行搜索,捕获的图像信息中,通过计算,能够得到目标与无人机之间的高低角,为了计算高低角对定位精度的影响,假设目标捕获时的方位角BVP=10°,高低角的改变量为10°,对传统的单无人机目标定位模型和本文建立的目标定位模型进行比较计算,结果如图9所示。
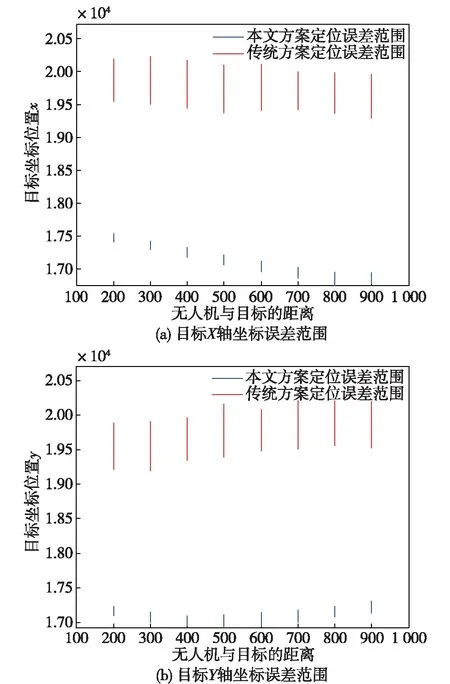
图9 高低角对目标定位精度的影响
计算结果表明,当目标与无人侦察平台处于不同的高低角位置时,对目标的定位误差范围最小为150m*152m*184m(当εVP=-20°时),最大为163m*181m*178m(当εVP=-50°时),误差变化范围为13m*29m*6m,可见,本文建立的目标定位模型,在无人机位于目标不同的高低姿态角的情况下,都能比较稳定的对目标进行定位。
同样,如图8所示,目标P1位置参数未知,前面通过仿真计算得到了当εVP=-20°时,对目标的定位误差范围最小,在此基础上,对模型再次进行调整,改变无人平台与目标之间的方向角,从水平方向对本文建立的模型的目标定位稳定性进行计算,方向角范围为0≤BVP≤80°,调整幅度同样是10°(例外:当目标与无人平台的方向角为90°时,即目标位于无人机的正右方,与电视传感器的使用相违背;当-80°≤BVP≤0°时,目标从无人机的右方转移到左方,并没有实质性的变化,因此,这两种情况不予考虑)。计算结果如图10所示。
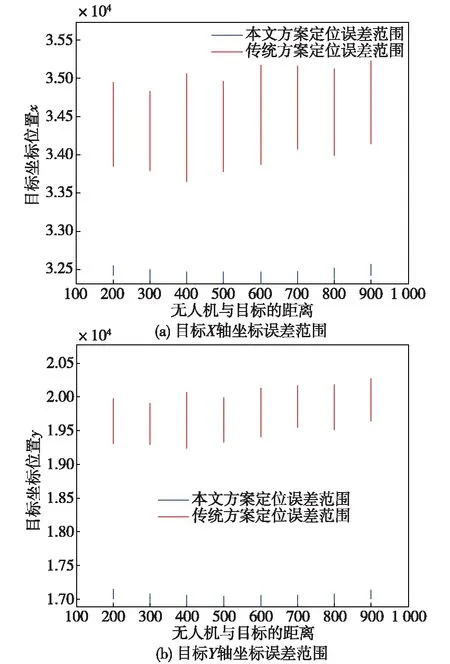
图10 方向角对目标定位精度的影响
通过比较,不仅在目标位置信息的可靠性方面,在目标相对于己方舰艇位置坐标的误差范围,本文建立的目标定位模型都要优于传统的单无人机目标定位方法,通过计算,当目标与无人平台的方向角度在30°以内时,目标定位误差范围较小。当侦察环境恶劣,无法将无人平台调整至最合适的侦察角度时,不论目标与无人平台之间的方向角处于何种情况,误差变化量最大与最小之间仅相差23m*32m*55m。
通过上述的仿真计算,本文所建立的目标定位模型在稳定性和定位精度上,都要远远好于传统的单无人机目标定位模型。
4 结束语
通过便携式无人机进行目标定位,能够适应复杂地形的战场环境,本文建立的无人机目标指示模式模型,降低了微/小型无人机飞行过程中随机误差带来的定位误差,提高了超视距舰炮武器系统火力打击的目标指示精度。
与传统的无人机目标指示不同的是,本文提出的方法主要结合战前战场侦察所获取的卫星地图或者炮兵地图,通过目标匹配,对参照点进行标定,无人机仅作为目标与参照点的中继,消除了无人机飞行过程中不确定因素造成的目标定位误差。另一方面,随着侦察卫星、遥感技术的发展,大量的战前侦察成了海军作战必不可少的阶段,选择山峰等特征明显的地形地貌,能够极大地提高目标定位精度。本文所建立的目标指示模型,其舰艇坐标系以地理坐标系为主,具有较强的适应性。
[1] 郑昌.舰载无人机在岛屿登陆作战中的运用[J].四川兵工学报,2011,32(6):31-32,36.
[2] 孙成陆.特种作战中无人机侦察力量的运用[J].四川兵工学报,2011,32(1):40-42,45.
[3] 黄亮,程蓓,王澍初,等.舰载无人机未来作战应用指挥体系分析[J].舰船科学技术,2015,37(1):123-126.
[4] 方展辉.GPS在小型无人机导航定位中的应用研究[D].沈阳:东北大学,2009.
[5] 黄亮,刘忠,李剑辉,等.空中机动平台光电载荷无源定位算法及坐标变换分析[J].海军工程大学学报,2009,21(6):36-40.
[6] 黄亮,刘忠,石章松,等.无人机系统纯方位定位技术及应用[M].北京:国防工业出版社,2015.
[7] Y Li, QY Chen, S Xu, ZX Hou. A fast target localization method with multi-point observation for a single UAV[C]. China: Control & Decision Conference, 2016.
[8] Pai P, Naidu V P S. Target geo-localization based on camera vision simulation of UAV[J]. Journal of Optics, 2017:1-11.
[9] Lin S, Garratt M A, Lambert A J. Monocular vision-based real-time target recognition and tracking for autonomously landing an UAV in a cluttered shipboard environment[J]. Autonomous Robots, 2017, 41(4):881-901.
[10] Sun J, Li B, Jiang Y, et al. A Camera-Based Target Detection and Positioning UAV System for Search and Rescue (SAR) Purposes[J]. Sensors, 2016, 16(11):1778-1786.
[11] Wang X, Liu J, Zhou Q. Real-Time Multi-Target Localization from Unmanned Aerial Vehicles[J]. Sensors, 2016, 17(1):33-42.
[12] Xuan Du, Kang Zhu, Bo Qin. Autonomous Identification and Planning System for Quadrotor UAV Based on Vision[C]. 3rd Annual International Conference on Mechanics and Mechanical Engineering, 2016.:700-707.
[13] Fink G, Xie H, Lynch A F, et al. Dynamic Visual Servoing for a Quadrotor Using a Virtual Camera[J]. Unmanned Systems, 2017,5(1):1-17.
[14] 冯波.无扫描3D成像激光雷达技术探究[D].成都:电子科技大学,2012.
[15] Ou C, Jiang J, Wang H, et al. Monte Carlo approach to the analysis of UAVs control system[J]. Guidance, Navigation & Control Conference, 2015,46(1):261-264.
[16] 段辉明,卫东,葛成辉,等.遥感图像与地理坐标匹配的快速算法[J].中国图象图形学报,2004,9(1):87-92.
[17] Fernando V, Felipe G. Enabling UAV Navigation with Sensor and Environmental Uncertainty in Cluttered and GPS-Denied Environment[J]. Sensor, 2016,16(5):666-683.
[18] Xu GL, Qi XP, Zeng QH, et al. Use of land’s cooperative object to estimate UAV’s pose for autonomous landing[J]. Chinese Journal of Aeronautics, 2013, 26(6):1498-1505.
[19] 张岩,李建增,李德良,等.基于POS与图像匹配的无人机目标定位方法研究[J].军械工程学院学报,2015,27(1):39-45.
[20] 张兴家.基于视觉的移动机器人蒙特卡罗定位算法研究[D].秦皇岛:燕山大学,2015.
[21] 朱守彪,石耀霖.基于Monte Carlo方法的由GPS观测计算地应变率的误差分析[J].地球物理学报,2007,50(3):806-811.
[22] 朱惠民,王航宇,孙世岩.基于蒙特卡罗的无人机侦察平台误差修正方法研究[J].科学技术与工程,2017,17(15):255-264.
Error Analysis of Single UAV Target Position Model based on Shipborne Weapon System
ZHU Hui-min, WANG Hang-yu, SUN Shi-yan
(Naval University of Engineering, Wuhan 430033, China)
A kind of single UAV target positioning model combining CCD camera and laser imaging radar is established based on the single UAV bearing only positioning in this paper. Taking the reliable ground reference as the relay point, the target position parameters of the naval gun shooting could be obtained by coordinate transformation. The errors were compared in terms of the distance, the angle of direction and the angel of elevation through a large number of simulation and calculations. And the results showed that the proposed scheme had less error range than the traditional triangulation positioning method.
UAV; target location; target indication precision; pocket-sized fire control terminal; fire support operations
1673-3819(2017)06-0113-06
TJ391;E917
A
10.3969/j.issn.1673-3819.2017.06.024
2017-08-07
2017-08-21
朱惠民(1989-),男,云南昭通人,博士研究生,研究方向为最优化理论及其在海军作战系统的应用。王航宇(1965-),男,博士,教授。孙世岩(1979-),男,博士,副教授。
《指挥控制与仿真》2017年第39卷总目次
第一期
海上遇险目标发现概率建模研究
王光源, 刘建东, 章尧卿, 等(1)
航母远程对潜防御区攻击型核潜艇配置方法
吴福初(5)
基于蚁群算法的直升机应召式搜潜航路规划
李 林, 吴卫玲, 苏通献(10)
基于网络最大流的网络目标选择模型
喻飞飞, 胡友涛, 王 剑(16)
信息化舰炮武器系统体系结构
白 奕, 周克强, 丁继亮(20)
基于改进模糊神经网络算法的炮兵火力运用方案评估
刘 铜, 李小全, 王永良, 等(25)
装甲旅对控守通道之敌进攻战斗打击目标决策
张松昌, 屈 洋, 张 政(30)
舰载机偏置中线监视研究
田杰荣, 王月基, 史存虎(37)
机动目标跟踪的一种防发散RBUKF算法
张 园, 钟志通, 刘淑波, 等(41)
基于SysML的模型驱动武器装备体系结构设计与分析
陆 法, 孙文虎, 贾 鹏(44)
多弹种条件下压制性武器弹药补给策略
严凤斌, 刘振宇, 张宝华, 等(48)
陆上防御行动效果评估
张家亮, 张 猛(52)
基于广义网络分析和云模型的潜艇威胁风险评估
宋晨阳, 张 韧, 刘科峰, 等(57)
平行仿真技术在指控系统中的应用构想
窦林涛, 初 阳, 周玉芳, 等(62)
平行系统在反导指挥控制中的应用
陈 淼, 孙 强, 王东科(70)
海上作战体系仿真建模技术
初 阳, 季 蓓, 窦林涛(73)
反舰导弹时间协同效果仿真实验技术
刘 志, 周玉芳, 窦林涛, 等(77)
基于全去斜率接收技术的雷达距离成像
周 涛, 周钰鑫(83)
基于盲分离的多分量LPI雷达信号检测
郭 薇, 廖林炜, 张柏林(89)
基于RCS起伏的雷达组网探测概率模型
梁海明, 王义涛, 马政伟(94)
基于舰载雷达照射的箔条云散射功率分析
王 琦, 刘明春(98)
基于人工势场的旋翼飞行器航迹规划方法
刘 畅, 罗宁曦, 芦利斌, 等(101)
航空反舰导弹综合测试系统设计与实现
陈遵银, 王超勇(106)
非侵入式故障注入技术研究与实现
杜阳华(109)
一种基于心跳检测的网络时间同步方法
马继伟, 何佳洲, 丁春山(116)
海军服务化描述语言的静态缺陷检测方法
李 源, 李 吟, 姚海洋(122)
综合火力方案模拟评估
张庆捷, 徐 华, 赵 瑾, 等(130)
防空武器系统复杂干扰环境下的试验评估技术
韦 卓, 黄建忠, 姚德龙, 等(135)
第二期
岛礁防空兵力需求分析
马新星, 滕克难, 侯学隆(1)
基于MAS的反导体系作战指挥系统建模研究
何 榕, 罗小明(5)
基于灰色关联决策和组合赋权方法的反潜巡逻机搜潜决策
祝 超, 鞠建波, 王 鹏, 等(10)
水面舰艇编队与反潜巡逻机协同对潜搜索效能分析
杨秀庭, 许林周, 李 军, 等(15)
反潜巡逻机声呐浮标投放诸元确定方法研究
王新为, 谭安胜, 尹成义(19)
舰艇编队协同应召搜索最优路径规划方法
赵 亮, 任耀峰, 张 献(24)
基于折线简化的方位导引方法的可用性研究
徐继华, 袁富宇(31)
基于反导探测能力的舰队队形优化分析方法
朱燕麒, 刘 进, 伍国华, 等(36)
机群打击链兵力模块化描述与建模方法
罗木生, 王宗杰, 刘 瑜(41)
基于云重心理论的装甲旅攻击控守通道之敌战法决策
张松昌, 屈 洋(45)
SVR和BP在对空威胁评估中的应用
王 芳, 张军辉, 吴志泉(51)
助推滑翔高超声速反舰导弹多方向协同突防可行性研究
王少平, 董受全, 李晓阳, 等(55)
基于匹配度的目标打击武器适宜性分析
杨奇松, 王顺宏, 王国江, 等(61)
基于特征点的典型目标跟踪算法性能分析
窦 慧, 赵书斌, 王 强(67)
反舰导弹攻击岛礁区编队舰船末制导雷达开机距离和
角度研究
侯学隆, 陈 榕, 陈邓安(76)
基于情境的战场态势感知界面模型
杨 松, 杨 强, 杨朝晖, 等(81)
随队干扰动态资源分配模型与算法
向崇文, 姜青山, 屈 振(85)
基于末端防空的威胁评估
史秉政, 王旭烽(90)
基于ANP的作战部队实战化训练评估
沈墩彪, 张 静, 黎 锐(95)
基于DoDAF的遥感卫星地面系统体系结构建模与仿真
梁桂林, 周晓纪, 王亚琼(105)
舰载激光武器反导技术
刘凤仪, 王德石(113)
坐标转换理论及其在半实物仿真姿态矩阵转换中的应用
陈 凯, 王 翔, 刘明鑫, 等(118)
基于RNP的DR/GPS/DME/VOR综合导航及性能评估方法
马航帅, 王 丹, 孙晓敏(123)
物流选址方法在舰载机飞行甲板调运中的应用
李晓杰, 谢 君, 傅 冰(129)
反潜武器系统测试性维修性定量指标验证试验方法
刘 杰, 吕 琳, 刘兆才(135)
基于Lucene的异构数据库全文检索技术
王 亮, 苏 云(141)
“美国”级两栖攻击舰作战能力分析
朱 磊, 丁 军, 梁 立(145)
第三期
探雷声纳目标的概率分类技术
马爱民(1)
基于OPM作战概念的武器系统需求确定
郑 展, 杨 峰, 王 涛, 等(5)
舰炮拦截超声速反舰导弹跟踪雷达架构需求
吴 强, 张保山(11)
武装直升机编队对地攻击兵力需求计算模型研究
苗李达, 王宗杰, 孙守福(16)
基于动态直觉模糊群决策的舰艇编队防空威胁评估
申兴盼, 丁 勇, 李世豪(19)
具有被动定位功能声诱饵的对抗弹道模型
周敏佳, 徐利刚, 邹家奇, 等(27)
水面舰艇鱼雷防御武器系统
李 源, 杨盛雷(31)
多智能体编队在时延约束下的动态跟踪控制
戴国忠, 王怀龙(36)
基于双层合同机制的分布式火力规划方法
朱晶星, 郑 晟(40)
对无源相干雷达的干扰策略研究
王肖洋, 高俊光, 刘广建, 等(45)
基于动态贝叶斯网络的空战决策方法
孟光磊, 罗元强, 梁 宵, 等(49)
反潜巡逻机应召布放多基地声呐拦截阵搜潜效能研究
鞠建波, 祝 超, 胡胜林(55)
反潜巡逻机使用被动全向声呐浮标对潜跟踪方法
王新为, 尹成义(60)
基于改进WSEIAC模型的便携式通信对抗装备作战效能评估
胡军军, 高俊光, 郭 杰, 等(64)
基于概率型网络的破障装备编组运用效能评估
涂建刚(67)
飞机飞行动力学仿真气动导数求解插值算法对比
张玉镇, 张志春, 陈 蕾, 等(70)
基于多级优度评价方法的导弹武器系统效能评估
王 丰, 张 磊, 胡春万(74)
面向指挥信息流的组件式仿真模型框架
王 军, 郑世明(78)
基于区间数和复杂网络的空间信息需求响应过程仿真
鲁 赢, 谭雪平, 李翼鹏, 等(86)
复杂网络视角下的体系破击战法实验
朱 江, 沈寿林, 白承森, 等(93)
一种战场区域电磁环境可视化表征方法
赵金红, 王璀璨, 李 博(98)
伪装效果评价模型的图像纹理特征提取方法
见超超, 胡江华, 崔光振(102)
基于Tilcon的多目标信息排序系统人机交互软件设计
姚传明, 王庆元, 杨叶林(106)
基于特征选择校验法的舰船立体RCS测量方案设计
宋 广, 周钰鑫(111)
基于GPU的战场态势实时处理与显示技术优化
张志明, 牟海波(115)
飞机飞行参数数据预处理方法研究
金慧琴, 王正磊, 胡文春(121)
一种改进的炮射驾束制导炮弹导引方法
夏家伟, 张亚伦, 严 平(126)
指挥信息系统验证支撑软件平台关键技术
周 雷, 杨学春, 王文普, 等(130)
基于总能量控制的下滑波束导引系统设计仿真
张 琳, 张子健, 龚喜盈(135)
第四期
基于混合动态贝叶斯网的无人机空战态势评估
孟光磊, 马晓玉, 刘 昕, 等(1)
基于威胁联网模型的无人机航迹规划
张辉明, 鲁 艺, 朱 杰(7)
岸舰导弹对海突击作战中预警机的阵位配置
刘 浩, 罗木生, 王宗杰(12)
助推滑翔高超声速反舰导弹末制导雷达搜索过程分析
王少平, 董受全, 刘 亿, 等(16)
基于外部特征的弹道建模仿真
费惠佳, 崔连虎(22)
声呐浮标阵有效搜索面积建模
李心舒, 李伟波, 罗木生(26)
考虑边界约束的悬浮式深弹布放模型优化及算法
任 磊, 贾 跃, 宋佳平(30)
多干扰机间夹角对雷达暴露区的影响
杨 刚, 郭建蓬, 赵俊阳(35)
海上机动目标CND-CS-UC散布规律研究
侯学隆, 姜青山(40)
反末敏弹武器系统拦截弹数学模型
冯鹏鹏, 殷希梅(46)
基于改进遗传算法的多弹型混合火力分配优化模型
李亚雄, 刘新学, 武 健(50)
直航鱼雷发现概率的解析计算方法
李 勐, 代志恒(55)
基于鱼雷报警性能的反鱼雷鱼雷拦截效能分析
白一惠, 周 涛, 肖碧琴, 等(60)
制导火箭子母弹射击效率分析
刘震宇, 王 鹏, 李 巍, 等(65)
防空作战中异常空情威胁等级评估
刘 庆, 崔浩林, 毛厚晨(69)
陆军战术通信干扰营作战能力评估指标体系
卢义成, 王 斌, 李柔刚(75)
基于摧毁目标期望值的预警机作战效能评估
任 民(80)
基于SEM的近程反导舰炮武器系统作战能力评估
王子齐, 刘高峰(85)
基于交互桌面的作战仿真
管东林, 刘建军, 杨 强, 等(92)
基于作战流程仿真的编队指挥所战位优化设计
汪 陈, 姜 军, 李敬辉(96)
装备作战需求方案质量评估推演系统设计
傅 勉, 王世贵, 张晓杰(101)
计量“四线一库”自动化巡检和智能运维系统的设计与分析
彭楚宁, 范 洁, 蔡奇新, 等(105)
一种改进延迟锁相环跟踪系统的FPGA实现
王正磊, 周新力, 宋斌斌(109)
基于XYZ颜色空间的图像颜色复原
见超超, 秦建飞, 朱立岩, 等(113)
基于SRTM高程数据的变步长海面快速可视域分析方法
王 栋, 刘 林, 张顺发, 等(117)
基于综合技术的应答触发信号提取设计
杨 辉, 周环宇(121)
激光目标回波模拟器设计技术
周瑞岩,刘明皓(124)
基于Jack平台的虚拟设备维修拆卸序列规划
叶 霖, 沈延安(128)
基于无控弹道信息的水平风速辨识方法
高 庆, 王亚飞, 王海川(134)
第五期
战场态势热力图构建方法研究
董浩洋, 张东戈, 万贻平, 等(1)
远程精确打击对卫星信息时效的需求研究
洪 俊, 张辉武, 沈振华(9)
基于蝙蝠算法的舰载一体化雷达电子对抗资源调度
王龙涛, 姜 宁(12)
基于任务分解的合成营作战编组规划模型
郭 峰, 王树坤, 孟凡凯(18)
基于UML的基本指挥所作战指挥模型
杨圩生(22)
基于析因实验的作战筹划指标分析
孙 鹏, 尹延文, 方 正(25)
助推滑翔高超声速反舰导弹突防密集阵武器能力分析
王少平, 董受全, 李晓阳, 等(30)
基于节点度约束的无线通信网拓扑模型
叶礼邦, 郭新海, 齐伟伟(37)
结合小波分析和变分原理的雷达图像去噪模型
王 俊, 杨成龙(41)
基于自适应多子直方图均衡的图像增强算法
苑豪杰, 刘昌禄, 许建平, 等(45)
地形阻挡条件下对超短波通信电台定位区的计算方法研究
樊 松, 沈 楠, 卢义成(50)
基于边际似然比的目标机动的序贯检测方法
刘 强, 许 洋, 牛竹云(54)
面向反恐处突的军地联动平行系统研究
许启亮, 张永亮, 周 波, 等(58)
基于均匀高斯云模型的反恐作战能力评估
杜 波, 俞 岩, 赵 琪(63)
舰艇作战系统试训一体化协同仿真环境构建
刘高峰, 陈佳俊(71)
舰载机对海突击仿真模型框架设计
王宗杰, 侯学隆, 罗木生(76)
步战车低空打击视景仿真系统设计与实现
肖仁强, 吴盘龙, 周竹青(80)
基于OPM与ABMS的体系架构驱动仿真方法
黄其旺, 朱一凡, 李 群, 等(85)
陆军航空武器装备能力论证评估系统总体设计
魏靖彪, 李 鹏, 吕少杰, 等(89)
基于仿真对透明转发器的干扰分析
李岱若, 徐 慨, 杨海亮, 等(93)
柔性仿真训练系统的研究与应用
郑 娟, 危 懿, 王培源(100)
基于SOA架构的战场态势服务原型系统设计与实现
马超逸, 瞿连政(104)
最小二乘及其改进算法在外测数据处理中的应用
牟志华, 郭 枫(109)
箔条幕干扰边搜索边跟踪制导导弹方法研究
白 爽, 姜 宁(113)
基于非对称交互多模型算法的上升段弹道估计
耿林玉, 吴 楠, 孟凡坤, 等(120)
一维弹道修正弹预测误差和修正误差校正
黄 义, 杨绍清, 余家祥(126)
基于斐波那契数列短码长QC-LDPC码的构造
杨卫国, 郑 麟(130)
基于精准气象预测的地面大侧风试验组织与数据处理
吕碧江, 殷湘涛, 孙俊颖, 等(134)
第六期
网络信息体系技术架构
李迎春, 熊 伟(1)
海军观察预警体系效能评估数据资源需求研究
詹 武, 董亚卓, 宋 强(7)
基于复杂网络的动态天基预警系统抗毁性测度及影响因素灰色关联分析
杨苗本, 熊 伟(11)
侦察卫星支援对海打击作战研究
彭 耿, 张绪明, 刘 磊(17)
ATT拦截来袭鱼雷的有效发现态势要求及有关问题
江禅志, 高国兴, 衡 军(22)
航母编队航渡阶段中程防空哨舰预警探测与防空效能模型
于 括, 赵国艳(26)
基于潜艇运动规律的声呐浮标使用深度研究
张飞飞, 赵申东, 刘朝晖(30)
舰机两翼侧出前向协同巡逻护航反潜模型及仿真
吴 芳, 高青伟, 吴 铭(35)
基于最优数据压缩的雷达和ESM间断点迹融合跟踪
王永安, 李世忠, 王国宏(38)
航空及水下探潜磁异常异同分析
孙华庆, 王 丹, 孙 宇(43)
一种避免矩阵拆分的改进JPDA算法
石汪权, 袁富宇, 蒲 勇(47)
基于减少过估计的改进LDPC码最小和译码算法
杨卫国(53)
基于AHP的作战实验综合量化评估模型
顾 亚, 吴从晖, 陆志斌, 等(58)
对地攻击型无人机群协同作战效能分析
李 坎(63)
基于AHP和ADC的机载预警雷达对海探测效能评估
夏 栋, 马国豪, 忽 冉(69)
基于区间对偶犹豫模糊不确定语言的指挥员综合素质评价
杨宗华, 王金山(73)
军事仿真想定生成问题研究
李 晨, 柏彦奇, 史宪铭(77)
基于本体的指挥信息系统建模
程建博, 刘德生(82)
雷达对抗并行仿真的负载优化分析
于 尧, 赵忠文, 郭皇皇(89)
水声对抗系统干扰效果仿真研究
路晓磊, 张洪欣, 张小波, 等(96)
基于Rosetta软件和Vague集的战术机动事件检测方法
韩云飞, 杨露菁, 孙仲尧(99)
基于多特征多神经网络融合的目标识别技术
蒋 攀, 单连平, 刘义海(104)
基于双目视觉的舰载光电雨天对岸测距方法
王 涛, 王海川, 阚立杰(109)
舰炮武器系统的无人机目标侦察模型与误差分析
朱惠民, 王航宇, 孙世岩(113)
基于TDOA的基站布局对定位精度影响分析
周恭谦, 杨露菁, 刘 忠, 等(119)
舰炮对海基于舰位经纬度坐标虚拟射
黄 义, 王建明, 余家祥(127)
基于边缘信息和Otsu的红外图像分割方法
曲 杨, 许卫东, 杨骏堂, 等(130)
美军战术云计算应用研究
程赛先(134)
猜你喜欢
中学生数理化·七年级数学人教版(2022年6期)2022-06-05
导航定位与授时(2020年5期)2020-09-23
中国外汇(2019年20期)2019-11-25
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
海峡姐妹(2018年2期)2018-04-12
中学生数理化·七年级数学人教版(2016年6期)2016-05-14
山东青年(2016年2期)2016-02-28
海峡科学(2013年3期)2013-10-21
中学英语之友·上(2008年2期)2008-04-01