ATT拦截来袭鱼雷的有效发现态势要求及有关问题
2017-12-18 08:14:18江禅志高国兴
指挥控制与仿真 2017年6期
江禅志, 高国兴, 衡 军
(海军潜艇学院, 山东 青岛 266102)
ATT拦截来袭鱼雷的有效发现态势要求及有关问题
江禅志, 高国兴, 衡 军
(海军潜艇学院, 山东 青岛 266102)
按照反鱼雷鱼雷拦截来袭鱼雷的原理及其战术技术特点,提出保证反鱼雷鱼雷能够拦截来袭鱼雷的基本条件是必须通过发射控制保证其能及时在规定的态势范围内发现来袭鱼雷,并建立了描述反鱼雷鱼雷有效拦截来袭鱼雷的发现态势模型。然后,通过对水面舰艇和潜艇遭受来袭鱼雷攻击在战术背景和技术特点上的差异研究,提出了两者使用反鱼雷鱼雷在战术技术上的难点及主要问题所在。相关的结论不仅可作为论证各类海上作战平台防御武器系统建设、配置的依据,也是ATT作战使用需要着重研究和解决的主要问题。
防御鱼雷; ATT; 水声对抗; 发现态势; 相遇原理
鱼雷作为攻击方的一种致命水下杀伤武器,必然要激起防御方竭尽全力地采取各种措施对来袭鱼雷进行防御。因此,反鱼雷或防御鱼雷作战早已成为各类水面舰艇和潜艇的重要战术科目之一[1]。相应的,各国海军也把消除鱼雷威胁的措施集中于对其实施软硬对抗上,从而使得各类反鱼雷装备的应运而生和大量发展。
水声对抗器材的大力发展和广泛使用,对声自导鱼雷的作战使用效能提出了严峻挑战[2]。然而,针对各类水声对抗器材的原理和战术使用方式,通过鱼雷自身的智能化识别和跟踪技术解决鱼雷的反水声对抗问题也日渐成熟,进而使当今声自导鱼雷的反水声对抗能力得到了重大发展。由此,对来袭鱼雷实施硬杀伤的反鱼雷鱼雷,又成为反鱼雷武器家族的一个新成员而得到了越来越多的重视。
那么,反鱼雷鱼雷的作战使用需要什么条件、不同类型战术平台装备和使用反鱼雷鱼雷在战术技术上又存在哪些差异呢?这是装备发展必须首先解决的问题。正是为了这一目的,本文对反鱼雷鱼雷及其战术使用的相关问题开展初步研究。
1 ATT及其作战使用要求
反鱼雷鱼雷是一种具有动力、带有战斗部,能够通过水声信号对来袭鱼雷进行检测,并通过弹道控制对来袭鱼雷实施拦截和摧毁的轻型鱼雷武器,简称ATT(Anti-Torpedo torpedo)。
ATT作为一种主动搜寻并拦截来袭鱼雷的“硬杀伤”武器,在技术原理上和其他鱼雷没有本质区别。但是,由于ATT体积小、重量轻,其航程一般都比较小、航速也不可能大幅度超过其他鱼雷的水平。
尽管ATT所需要的功能和采取的技术和其他鱼雷类似,但两者的作战使命却是完全不同的:ATT是海上作战平台用于抗击敌方鱼雷攻击,通过硬杀伤摧毁来袭鱼雷,以保障装载平台安全为目的的防御型鱼雷;而大多数其他鱼雷则是用于主动对敌攻击,以达成消灭敌方水面舰船或潜艇为作战目的的攻击型鱼雷。
正是由于两者在作战使命(或者攻击目标)上的差异,导致了它们在作战使用要求上的显著差异:由于攻击型鱼雷的速度通常是被攻击舰艇目标的两倍或三倍以上,所以攻击过程中容许出现鱼雷尾追目标的情况;ATT的速度往往和其所攻击目标(来袭鱼雷)的速度相近,不可能成倍于来袭鱼雷的速度,所以防御过程中,当ATT的速度小于或等于来袭鱼雷的速度时,不容许出现ATT追踪来袭鱼雷的情况,或者说一旦出现这种情况,就不可能达成防御成功的目的[3]。
即无论哪一种战术平台,有效使用ATT的基本条件都是一致的,这就是不仅能够通过各种手段及时发现来袭鱼雷,而且还要通过射击控制及时把ATT发射到来袭鱼雷一定舷角范围内而满足ATT发现并对来袭鱼雷拦截的条件。
2 满足ATT拦截条件的发现态势
如图1所示,假设来袭鱼雷以直航方式接近其攻击目标(ATT发射平台),速度和航向分别为VT和CT,ATT的速度为VA,自导扇面半角和作用距离分别为α和R,对抗过程中,ATT按发射平台所设定的航向CA航行于WA点时发现来袭鱼雷于WT点。此时ATT相对于来袭鱼雷的舷角为XT,来袭鱼雷相对于ATT的舷角为XA,距离DR正好等于ATT的自导探测距离R。
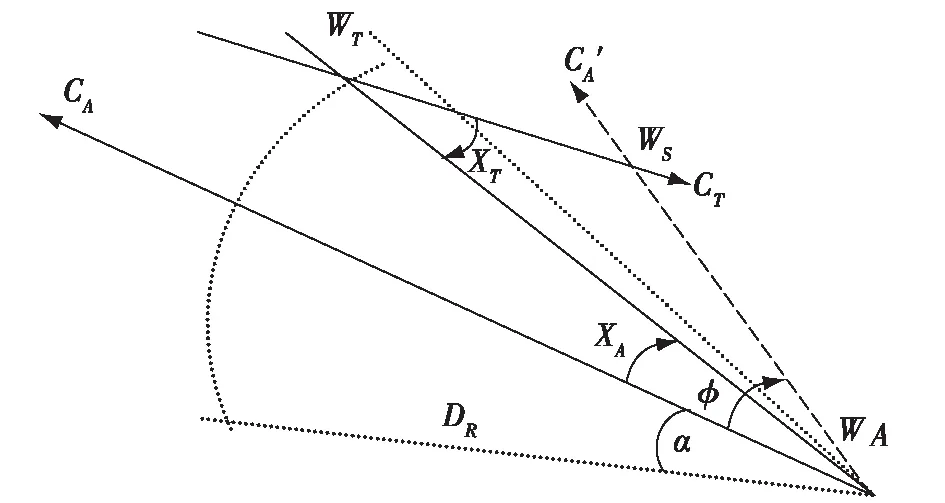
图1 ATT发现来袭鱼雷的相对态势描述
在不考虑拦截来袭鱼雷过程中,ATT对来袭鱼雷产生自导性能影响的条件下,ATT的自导装置发现来袭鱼雷时刻,两者的相对位置(用XT、XA和DR表示)称为ATT的发现态势。

φ=arcsin(ksinXT)
(1)
其中,k=VT/VA。
式(1) 有解的必要条件为
|ksinXT|≤1
(2)
并且,对应有两个解:
φ1=arcsin(ksinXT)
φ2=sgn(XT)π-φ1
(3)
这就是说,如果不考虑追踪过程所需要的航程消耗,当ATT的速度大于来袭鱼雷的速度时,总能追踪上来袭鱼雷。
然而,ATT发现来袭鱼雷之后,为了保证其正常跟踪,必须把来袭鱼雷始终置于其自导监测范围之内才能保持对其跟踪[4-6],这就要求来袭鱼雷一直处于ATT的自导探测范围之内,因此必须保证 |φ| <α,即
|arcsin(ksinXT) | <α<==>
|XT| (4) 显然,上述两个不等式的交集为: |XT| (5) 这就是理论上为保持跟踪过程中ATT能够对来袭鱼雷始终处于发现状态所要求的鱼雷瞬时舷角必须满足的关系[7],一旦跟踪过程的某一时刻这一关系不成立,之后的跟踪将不再可能。 上述不等式右端对应的角 XTmax=arcsin((1/k)sinα) (6) 就是保证ATT能够发现和拦截来袭鱼雷的最大发现鱼雷舷角。因此,保证ATT发现和有效拦截来袭鱼雷的发现态势是 XT∈(-XTmax,XTmax) (7) 作为海上执行各种作战任务的战术平台,水面舰船和潜艇是鱼雷武器攻击的两类主要目标,因此对来袭鱼雷实施防御是它们不可或缺的战术任务。但由于两者在作战环境上的差异,导致了它们遭受鱼雷攻击在战术技术上的众多差异。 潜艇遭受鱼雷武器攻击的发射平台种类多,可能是空中的反潜飞机、水面的各类舰艇、水下的潜艇或其他潜航器等都可以对潜艇实施鱼雷攻击。而且攻击潜艇所使用的鱼雷类型多,既有轻型鱼雷,也有重型鱼雷。 而水面舰艇遭受鱼雷武器攻击的发射平台则十分单一,通常只有潜艇,且反舰鱼雷均为重型鱼雷,轻型鱼雷不用于反舰。 轻型反潜鱼雷主要用于反潜,且采用“点对域”的攻击样式,鱼雷发现目标前总是采用机动弹道搜索目标。例如,水面舰艇管装反潜鱼雷在发现目标之前采用蛇形加环形弹道对潜艇目标搜索、空投鱼雷和火箭助飞鱼雷在发现目标之前采用环形弹道搜索。这种攻击方式大大降低了对目标运动参数精度的要求,在扩大了鱼雷搜索范围的同时,也使被攻击方难以判断其运动规律。 重型鱼雷既反潜也反舰,且采用“点对点”的攻击样式,作为自导方式射击时,鱼雷总是采用直航方式接近目标。这种攻击样式鱼雷能否发现目标在很大程度上取决于目标运动参数的解算精度。作为被攻击方,在远距离报警条件下,判断其运动规律相对容易得多。 线导鱼雷依靠平台声呐对目标方位的测量而导引鱼雷接近目标,但在远距离条件下,保证鱼雷发现目标对声呐的测向精度有较高的要求。 各种作战平台对潜艇鱼雷攻击可采用多种射击方式,通常可采用提前点射击、方位射击、线导射击、区域射击。但对潜艇攻击时鱼雷的末段制导方式只有主动声自导。 而潜艇对水面舰船鱼雷攻击样式相对简单,通常只有提前点射击、方位射击、线导攻击。但对水面舰艇攻击的反舰鱼雷末段制导方式繁多,可采用直航、主动声自导、被动声自导、尾流自导和联合制导等多种制导方式。 反潜鱼雷发射平台(水面舰艇和反潜飞机)暴露性的特点决定了其可以借助其他平台指示的目标信息组织鱼雷攻击。而且,鱼雷一经发射便可通过空气介质迅速接近目标于一定范围内,这使被攻击的潜艇一旦报警来袭鱼雷,留下的对抗时间将十分有限,即对抗时间十分紧迫。但是,通常情况下这些平台测量距离相对较近、测量时间相对较短,目标定位精度相对较差。 反舰鱼雷发射平台(潜艇或其他潜航器)隐蔽性的特点决定了其组织鱼雷攻击所需要的目标位置信息必须依赖自身探测器进行探测,而且探测过程容许有较为充裕的观测、跟踪和解算时间、测量距离远、目标定位精度较高,但是鱼雷总是通过海水介质接近目标,且速度慢、时间长。如果水面舰艇能够远距离报警来袭鱼雷,便能争取较为宽裕的对抗时间。 水面舰艇和潜艇这两类平台通常只能测量来袭鱼雷的方位信息,如果需要包括来袭鱼雷距离、速度和航向在内的其他信息时,则必须在连续测量来袭鱼雷方位的基础上通过计算而获取。 显而易见,在这种信息环境下,使用ATT对来袭鱼雷实施拦截时,为了创造满足ATT拦截条件的发现态势,发射平台就必须尽可能准确地设定ATT的射击控制参数,而要想准确计算这些参数,就必须获取来袭鱼雷较为精确的运动参数,而精确计算来袭鱼雷的运动参数,又必须对来袭鱼雷的类型(重型鱼雷还是轻型鱼雷)及其跟踪阶段(鱼雷当前处于接近阶段还是自导跟踪阶段)有基本的识别。因此,在报警来袭鱼雷后,发射平台必须经历对来袭鱼雷的识别、估计其运动状态和计算射击参数等主要过程。 由于不同平台遭受鱼雷攻击在战术技术上存在众多差异,进而必定导致其使用ATT时在上述环节上的差异。可以看出,这些差异主要体现在以下几个方面: 1) 报警后对来袭鱼雷类型识别问题。判断来袭鱼雷的类型是估计其运动状态的关键,也是决定ATT拦截成败的重要前提。对于水面舰艇,由于大多数情况下都是遭遇重型鱼雷攻击,故几乎无需对来袭鱼雷进行类型识别。但对于潜艇来说,在仅仅依赖来袭鱼雷方位的条件下做出正确地识别是十分困难的。 2) 远距离条件下对来袭鱼雷运动状态估计问题。在远距离报警来袭鱼雷(报警距离大于鱼雷自导作用距离)条件下,水面舰艇可以直接假设来袭鱼雷做匀速直线运动,通过连续测量来袭鱼雷的方位解算其运动参数相对要简单得多。而潜艇在遭到轻型反潜鱼雷攻击时,即使发现鱼雷距离足够远,但来袭鱼雷的环形或蛇行搜索过程将使得解算其运动参数十分困难。 3) 近距离条件下对来袭鱼雷运动状态估计问题。在近距离报警来袭鱼雷(鱼雷已经进入末段自导)条件下,由于反舰重型鱼雷自导方式繁多,而且不同自导方式的追踪弹道差异较大,这对于水面舰艇来说,要想解算来袭鱼雷的运动参数是很困难的。但攻击潜艇的主动声自导鱼雷确有相似的弹道过程,并且由于潜艇速度通常较慢,来袭鱼雷弹道的变化曲率也不会太大,故设定ATT的弹道参数相对容易些。 综合以上分析,可以得到结论:水面舰艇使用ATT的主要困难在于近距离报警来袭鱼雷的条件下,因为这时很难及时判断出来袭鱼雷的末段自导搜索方式,也就难以预测来袭鱼雷的未来位置。所以,远距离报警条件下是水面舰艇使用ATT的有利条件;潜艇使用ATT的主要困难是由于很难及时判断出来袭鱼雷的类型(重型或轻型),而难以预测来袭鱼雷的弹道过程。尽管近距离条件下估计来袭鱼雷的概略位置较水面舰艇相对容易些,但作为末段防御,还必须顾及拦截的失效率和成功拦截后对自身安全带来的问题。 因此,无论在水面舰艇上,还是在潜艇上,ATT只能作为反鱼雷作战的一种武器装备之一,在目前的技术条件下,包括水声对抗装备在内的其他反鱼雷武器仍然是各类海上作战平台不可缺少的防御武器。要想使ATT成为相关作战平台上的有效防御武器,并且满足在现代条件下的作战运用,还必须密切结合各种作战平台的实际,在强调装备的同时,特别强调提高其应对各种复杂作战情况的能力。本文只是根据作战使用的具体情况,提出了相关的问题,而解决这些问题尚需在装备配套建设和作战运用两方面共同开展前期的研究工作。 [1] 李本昌.潜射鱼雷作战运用理论与工程[M].北京:国防工业出版社,2014. [2] 李本昌,刘春跃,郑援.现代水声对抗装备发展及其对海战的影响[J].鱼雷技术,2011,19(6):468-470. [3] 刘庆,王新宏,刘建国.反鱼雷鱼雷发射角的讨论[J].声学技术,2011,30(4):7-9. [4] 范路,吕瑞,王志杰,等.反鱼雷鱼雷自导导引弹道方法研究[J].舰船电子工程,2014,34(3):162-164. [5] 李宗吉,张西勇,练永庆.反鱼雷鱼雷自适应滑模导引律[J].弹道学报,2015,27(1):24-27. [6] 王新宏,刘庆,刘建国.基于相遇区域的反鱼雷鱼雷拦截弹道[J].鱼雷技术,2013,21(4):27-29. [7] 李本昌,李长文.预定相遇态势的潜射鱼雷射击及其技术方法[J].指挥控制与仿真,2013,35(2):5-7. [8] 李本昌,刘光,尹文进.潜艇鱼雷射击控制方式及其有关问题[J].火力与指挥控制,2012,37(11):1-3. Detective Range and Related Problems of ATT Intercepting Incoming Torpedo JIANG Chan-zhi, GAO Guo-xing, HENG Jun (Naval Submarine Academy, Qingdao 266102, China) According to the principle of intercepting incoming torpedo by ATT and its tactical and technical characteristics, the basic requirement for ATT to intercept incoming torpedoes is that they must be launched to ensure that they can find incoming torpedo in a prescribed range.And a detective range model that describing the effective interception by ATT is established. Then point out the difficulties and main problems of tactical and technical use of ATT through the differences of surface ship and submarine attacked by torpedo in tactical background and technical characteristics. torpedo defense; ATT; underwater acoustic countermeasure; detective Range; meet principle 1673-3819(2017)06-0022-04 TJ630.3+4;E917 A 10.3969/j.issn.1673-3819.2017.06.005 2017-09-12 2017-09-26 江禅志(1963-),男,山东青岛人,高级工程师,研究方向为作战仿真。高国兴(1971-),男,副教授。衡 军(1981-),男,博士。
XA<α
DR3 不同平台遭受鱼雷攻击在战术技术上的差异
3.1 战术背景上的差异
3.2 攻击样式的差异[8]
3.3 射击方式上的差异
3.4 技术特点上的差异
4 两类平台使用ATT的主要难点或问题
5 结束语
猜你喜欢
小学生学习指导(小军迷联盟)(2023年3期)2023-03-27 09:22:30军事文摘(2023年1期)2023-02-03 05:05:26小哥白尼(军事科学)(2021年8期)2021-11-22 07:58:22智能计算机与应用(2021年5期)2021-10-05 12:45:18小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02中国军转民(2018年1期)2018-06-08 05:53:23兵器知识(2017年10期)2017-10-19 19:34:33军事运筹与系统工程(2017年1期)2017-07-31 18:19:00计算机测量与控制(2017年6期)2017-07-01 16:23:53声学技术(2014年1期)2014-06-21 06:56:34