
联合收割机产量检测系统智能终端设计
2017-12-16 09:02白晓平
农机化研究 2017年7期
马 鑫 ,王 鹤,白晓平
(1.辽宁福鞍重工股份有限公司,辽宁 鞍山 114016;2.辽宁科技大学,辽宁 鞍山 114051;3.中国科学院沈阳自动化研究所,沈阳 110016)
联合收割机产量检测系统智能终端设计
马 鑫1,王 鹤2,白晓平3
(1.辽宁福鞍重工股份有限公司,辽宁 鞍山 114016;2.辽宁科技大学,辽宁 鞍山 114051;3.中国科学院沈阳自动化研究所,沈阳 110016)
产量检测系统智能终端是获取田间产量信息的核心装置。为提高我国农机装备的技术水平和竞争能力,全面提升我国农机装备产业的自主创新能力,设计开发了基于CAN总线分布式的产量检测系统智能终端。智能终端包括车载显示器和智能节点两部分:车载显示器通过CAN总线接受智能节点的数据,而且能够实时显示并保存产量信息;智能节点的作用是读取各传感器的数据,并发送到CAN总线上。田间试验表明:智能检测终端运行良好,满足田间测产的要求。
智能终端;产量检测;CAN总线;联合收割机
0 引言
农田信息获取是精准农业实践过程的首要环节,特别是田间产量信息的获取尤为重要,因为以产量信息为基础建立产量分布图可为农田信息管理与决策提供可靠依据。要实现田间信息的采集,建立产量分布图,就要在收割机上安装测产系统。
目前,欧美等国家的精准农业技术已经成熟,测产系统及其技术在田间得到了广泛的应用,如美国的PF系统、AFS系统、Greenstar系统及英国Fieldstar 系统等[1]可实现农机自动导航、作物产量检测等功能。根据美国农业部的调查显示:2001年,37%的玉米产地在联合收割机上安装了测产系统;2002 年,29%的大豆产地在联合收割机上安装了测产系统;到2009年,大约有35%的冬小麦产地在联合收割机上安装了测产系统[2]。而且,收割机上配备测产系统的数量正在迅速增加,据估计,目前大约有50%的玉米和大豆产区在联合收割机安装了测产系统[1,3]。在德国,基于GPS的农田信息采集系统的应用比变量作业技术应用更加广泛[4],但只有6.7%~11%的农民采用了测产系统,实际应用并不多。其推广应用率较低的原因是测产系统的价格昂贵且复杂性。在澳大利亚,大约有30%的大中型农场配备了测产系统,这些系统广泛地应用在谷物、土豆、花生等作物的收割上[5]。
从目前来看,我国的测产系统虽然没有商品化产品,但在精准农业迅速发展的带动下,在谷物测产系统方面的研究从最初的引进转变为自主研发。1999年,东北垦区迈出了精准农业技术的第一步,引进了由CASE和John Deere公司联合生产配有测产系统的谷物联合收割机。2000年,一台带有AFS系统的CASE IH2366谷物联合收割机被北京小汤山国家精准农业示范基地引进,该收割机配备有谷物流量传感器和DGPS定位系统,可以利用AFS系统能生成产量分布图。2002年,该示范基地通过研究国外联合收割机测产系统,自主开发了一套适合我国联合收割机的测产系统,在河北保定进行了田间试验[6]。此时,国内对测产系统的研究从消化吸收转变为自主研发。中国农业大学设计开发了基于P8XC592微控制器的测产系统,该系统带有谷物流量传感器、速度传感器、割台高度传感器、谷物含水率传感器和升运器转速传感器;同时,系统的显示终端采用触摸液晶屏,并利用CF卡记录与存储产量数据。为了利用采集的数据绘制产量分布图,研制了产量分布图生成系统 Y-Mapper[7]。上海交通大学在测产技术上做了大量的研究和实验,设计开发了谷物流量传感器和显示终端[8],把传感器显示终端安装在佳联1075型联合收割机上进行了试验,田间试验结果显示所研制的测产系统能够满足测产的要求。此外,华南农业大学、江苏大学在谷物测产系统的装置开发上也做了大量的研究工作。
综上所述,对于测产技术的研究和实践,国内主要以引进、消化吸收国外技术为主,且研究大部分存在测产系统功能单一、通用性不强、可扩展性差和通信接口不规范等缺点。为解决上述问题,本文设计了一种基于CAN总线分布式的产量检测系统智能终端,并对智能终端的性能进行了田间试验。
1 智能终端总体功能设计
智能终端不仅要实现监测产量数据,还需对产量数据进行处理,计算出收割机当前位置的产量,并在线绘制出产量图。为满足田间测产的要求,所设计的智能终端总体功能结构如图1 所示。

图1 系统功能框图
智能终端的各部分功能如下:
1) 数据采集。主要对谷物流量信号、速度信号、升运器转速信号、谷物含水率信号、割台高度信号及GPS信号进行采集。
2) 参数配置。包括地块名、车次名、谷物种类、流量延时、标定系数和割幅宽度等设置,以及GPRS设备的配置。
3) 数据处理。利用去噪方法能够对各个传感器信号进行真实信号提取,以及对实时的GPS信号进行解析,同时把大地坐标转换为平面坐标。
4) 产量计算。根据各种传感器的采集数据进行产量计算,产量的形式有:总产量、单位面积产量和区域产量,多种产量形式的选择可以满足个人及农场作物规模化管理的需求。
5) 通信功能。对下层传感器实现各个智能节点的初始化,处理CAN报文的发送和接收、数据溢出、CAN出错及判断数据丢失等情况;对上层服务器的GPRS发送的语句格式进行相关定义,周期性地向远程服务器端发送田间测产数据。
6) 实时绘图。包括收割机作业时运动轨迹及轨迹上产量数据。产量数据是以散点或等值线来表达,收割机的作业位置及产量的分布情况通过绘图功能可以直观观察到。
2 智能终端设计
由于田间作业的环境非常复杂,所以智能终端的设计应具备结构紧凑、显示直观及操作简便的特点。本文所设计的智能终端包括两部分:车载显示器和智能节点。
2.1 车载显示器设计
2.1.1 车载显示器硬件设计
车载显示器的硬件组成结构图如图2所示。系统CPU采用STM32F103RET6,该芯片采用Cortex-M3内核,主频72MHz,具有512kB Flash及64kB SRAM。通过CAN收发器处理电路与智能节点进行通讯,采集传感器的数据;通过USART与串口屏进行通讯,串口屏具有数据显示和配置功能;通过移动通讯模块外接GPRS天线与监测中心通信,将采集数据发送给监测中心;通过I2C总线与EEPROM进行交互,完成配置参数的装载和保存功能。
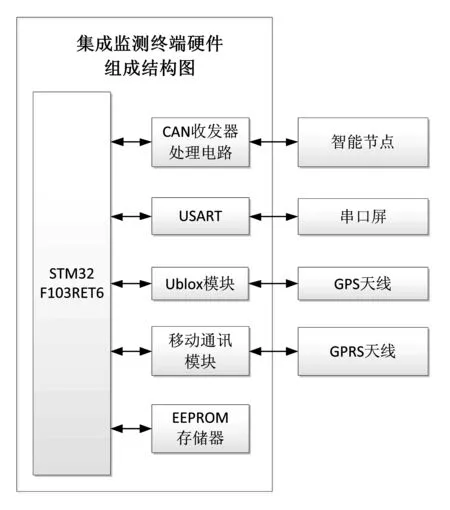
图2 硬件组成结构图
2.1.2 车载显示器软件设计
车载显示器的芯片采用STM32F103RET6,软件层次结构图如图3所示,共包含3个层次,从下到上依次为:①固STM32F10x_StdPeriph_Lib_V3.5.0,为意法半导体公司官方提供的应用程序接口库;②硬件层,在固件库的基础上封装的硬件相关的操作方法,包括cmd_queue、delay、ds18b20、hmi_driver、i2c、led等;③应用层,包括yield、picture、can、common、io、main、mobile、screen和store等。

图3 软件层次结构图
按照智能终端总体功能的需求将软件划分为以下模块:产量模块、绘图模块、CAN总线模块、GPS模块、移动通讯模块、串口屏模块及存储模块等。
1) 产量模块:首先根据谷物流量、速度、割幅等综合信息计算收割机运动轨迹上的产量,包括总产量、单位面积产量和区域产量,然后应用过滤器对产量数据误差进行过滤。
2) 绘图模块:首先把GPS数据即大地坐标转换成平面坐标,再结合过滤后的产量数据和平面坐标中的横纵坐标值绘制产量分布图。
3) CAN通信模块:车载显示器通过CAN总线与智能节点进行通信,采集各个传感器的数据。在CAN总线模块中主要实现CAN参数初始化、滤波器设置、接收数据及消息处理等功能,根据需求波特率设置为500kbps。
4) 串口屏模块:车载显示器通过USART1与串口屏进行交互。串口屏采用7寸1 024×600分辨率TFT彩屏。模块具有初始化、接收数据及解析数据及发送数据等功能。
5) 移动通信模块:车载显示器通过USART2与移动通讯模块交互,外接GPRS天线,将采集数据发送给监测中心,模块具有初始化和发送数据功能。
6) 存储模块:车载显示器通过I2C总线与EEPROM进行交互,芯片采用AT24C32。模块具有初始化、保存参数、读取参数和解析参数功能。
2.2 智能节点设计
由于测产系统中的传感器较多,硬件接口不一致,所以设计了一种通用的智能节点电路,用于完成以上信号的预处理和与CAN总线的互连。智能节点的硬件结构如图4所示。智能节点采用ARM公司32位Cortex-M3内核的STM32单片机作为处理器。STM32内部集成有完整的CAN控制器模块,支持 CAN 2.0A/B协议,是传感器与外部的通信接口。智能节点具有模拟电压信号测量模块,该模块采用运算放大器TLV2464构成电压跟随电路,显著增大了输入端口的阻抗,提高了测量精度,且对单片机的ADC输入端口起到了保护作用;智能节点还具有数字信号测量模块,能够测量带有数字通信功能的传感器。
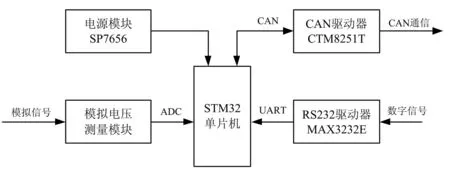
图4 智能节点的硬件结构
3 车载应用验证
为了验证智能终端的实际性能,将智能终端安装在联合收割机上进行了实际车载试验,其在联合收割机上的集成如图5所示。
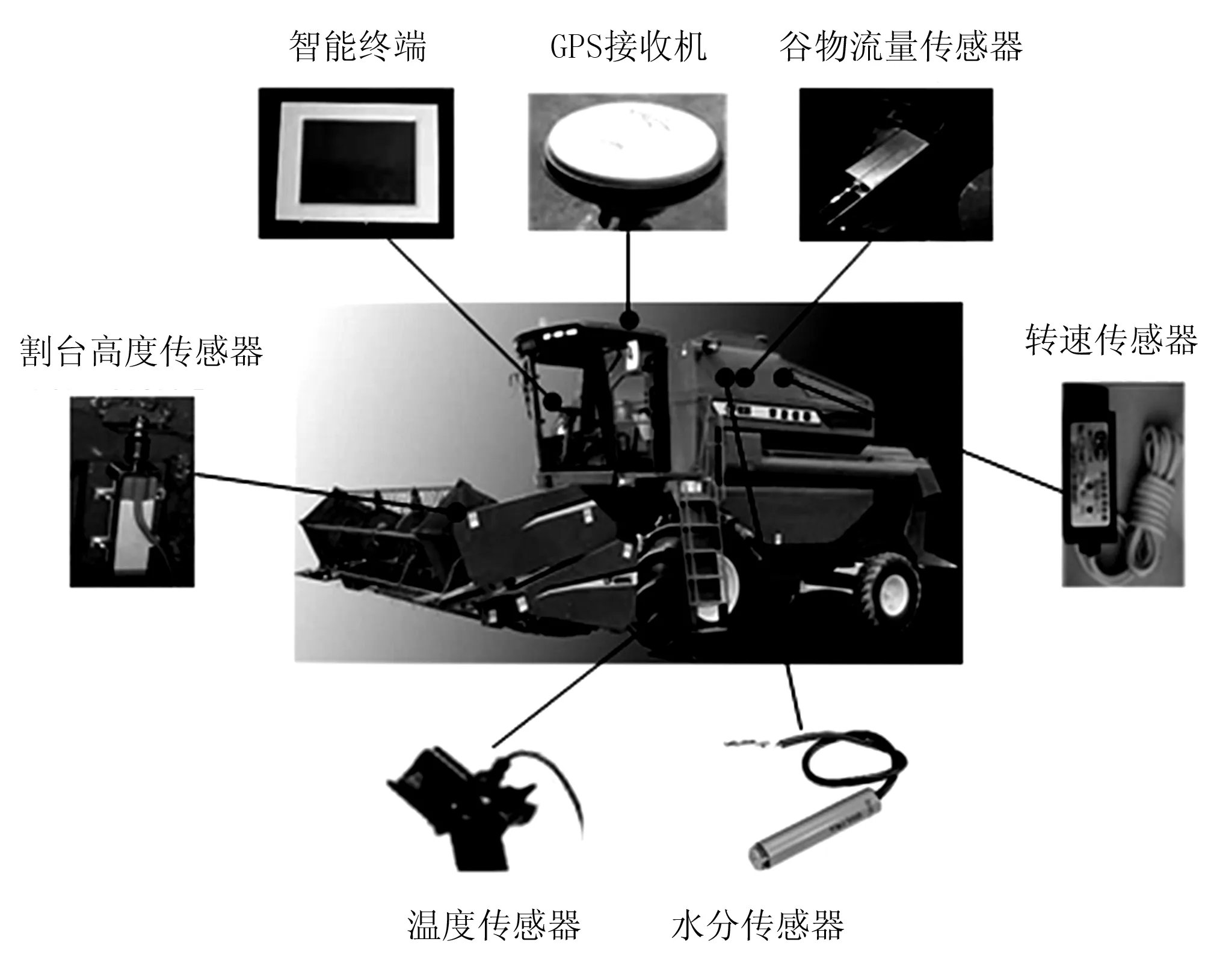
图5 测产系统在收割机上集成应用
3.1 检测传感器选型
3.1.1 谷物流量传感器
常用的谷物流量传感器有4种类型:冲量式流量传感器、射线式流量传感器、光电式容积流量传感器及刮板轮式容积流量传感器。本文采用的是冲量式谷物质量流量传感器,测量误差在3%~6%范围内。
3.1.2 GPS接收机
GPS接收机是接收GPS导航系统卫星信号,并确定待测点空间位置的一种仪器。根据GPS接收机的不同用途,GPS接收机可分为导航型接收机和测地型接收机。目前GPS接收机的产品类型多样,常用的GPS接收机主要有Trimble公司的SPS系列GPS模块化接收机、NovAtel公司生产的OEM系列GPS接收机及北斗星通的C200系列接收机。综合考虑GPS接收机的性能、接口、兼容性和成本等因素,最终选择北斗星通的C201-AT-600接收机。该接收机的具有2个串行通信接口,更新频率能够达到20Hz,在差分模式下定位精度为60cm。
3.1.3 含水率传感器
水份含量在精准农业测产中,不仅影响产量的高低,还影响了谷物质量水平,如按国家规定,针对不同谷物种类、不同地区,响应水份含量只有小于某一数值,才能达到国家粮食储藏标准。本研究选用的谷物含水率传感器的型号为HM1500,用以快速测量谷物含水率。主要技术指标如下:
测量范围/%RH:0~100
测量精度/%RH:≤±3
信号输出/ V:1~4
输入电源/ V:4.75~5.25
使用环境/℃:-40~+60
3.1.4 升运器转速传感器
升运器转速传感器是为了补偿升运器转速变化的影响,提高谷物流量测量的准确度。这里采用的是SZGB-6型光电转速传感器,具有测量距离远及不受环境光干扰的优点,内藏调制光发射和接收光电转换单元,能将被测物反射回来的光信号转变成电脉冲信号。传感器输出电平适应性强,能与各种转速数字显示仪配套使用及计算机接口电路直接联接,能无接触测量转速、线速等。主要技术指标:
测量方式:光电反射式
测速范围/r·min-1:1~30 000
检测距离/mm:最大150
输出信号幅值/V:1~5
0~0.5以下
工作环境温度/℃:0~40
相对湿度/%RH:85
反射条件:10 mm×10mm定向反射纸
3.1.5 割台高度传感器
割台高度传感器选用的是型号为KTM75的位移传感器,用以指示收割机测产系统是否工作。当割台抬起时,系统不工作。具体参数为:
线性精度/%:0.05
重复线性精度/mm:0.01
测量长度/mm:0~75
输出类型:0~给定输入工作电压
工作温度/℃:-30~125
3.1.6 速度传感器
速度传感器用于辅助计算收割机在单位时间内前进路程,根据割幅得到收割面积所以速度传感器对测产系统也十分重要。速度传感器采用的型号为RVS3雷达测速传感器,其应用多普勒原理进行测速。具体技术参数为:
速度范围/km·h-1:0.53~107.8
输出频率/ Hz:27.45
响应输出速度/ ms:≤200
速度误差:≤±3%(0.53~3.2 km/h)
≤±1%(3.2~70.8 km/h)
3.2 田间试验
在黑龙江省胜利农场安装了本文所设计的智能终端和相关传感器的联合收割机,进行了田间测产实验,如图6所示。收割机在田间进行多次直线收割,行走速度约为1m/s。重点针对智能终端的产量检测、参数设置、数据处理及通信功能等进行了实际测试。试验表明:该农机导航控制系统终端不仅能够提供比较友好的人机交互界面,而且为后续系统的开发及功能测试提供了非常便利的条件。

图6 收割机田间实验
4 结论
为了缩小我国农机装备技术水平与发达国家的差距,设计了一种基于CAN总线分布式的产量检测系统智能终端。智能终端由车载监视器和智能节点组成。车载监视器是智能节点来采集不同类型传感器的数据,能够支持产量检测系统的模块化设计,可根据不同农机类型、不同作业需求进行动态配置,提高装测产系统可靠性、可检测性和可维护性。最后,利用所开发的智能终端进行了田间测产试验,取得了理想的效果。
[1] 李鹏, 张文革, 王琦, 等.谷物产量监视器的试验研究[J].农业网络信息, 2004 (S1):47-50.
[2] Griffin T W.Adoption of yield monitor technology for crop production[J].Agriculturai and Naturai Resources, 20094(9)37-38.
[3] Blackmore B S.The role of yield maps in Precision Farming[D].Granfield University, 2003.[4] Reichardt M, Jürgens C, Klöble U, et al. Dissemination of precision farming in Germany: acceptance, adoption, obstacles, knowledge transfer and training activities [J].Precision Agriculture, 2009, 10(6): 525-545.
[5] Bramley R G V, Hamilton R P.Understanding variability in wine grape production systems[J].Australian Journal of Grape and Wine Research, 2004, 10(1): 32-45.
[6] 陈树人, 李耀明, 张西良.谷物联合收割机测产系统研究现状与展望[J].农业机械,2008(8): 62-63.
[7] 邝朴生,蒋文科,刘刚,等.精确农业基础[M].北京:中国农业大学出版社,1999.
[8] 金继运. “精准农业”及其在我国的应用前景[J].植物营养与肥料学报,1998,4(1):1-7.
Abstract: Intelligent terminal for yield monitoring system is the core device to obtain yield information. In order to improve technology of agricultural machinery,an intelligent terminal is developed based on CAN bus.Intelligent terminal consist of vehicle monitor and intelligent node.Vehicle monitor receive the data from CAN bus.While intelligent node collect signal from sensors and send the data to CAN bus. The field experiment shows that the intelligent terminal works well and meets the requirement of the field test.
ID:1003-188X(2017)07-0062-EA
Design of Intelligent Terminal for Yield Monitoring System of Combine Harvester
Ma Xin1, Wang He2, Bai Xiaoping3
(1.Liaoning Fu-An Heavy Industry Co., Ltd, Anshan 114016, China; 2. University of Science and Technology Liaoning, Anshan 114051, China; 3.Shenyang Institute of Automation Chinese Academy of Science, Shenyang 110016, China)
intelligent terminal; yield monitoring; CAN bus;combine harvester
2016-05-18
辽宁省科技攻关计划项目(Y5L7160701);国家高技术研究发展计划(863计划)项目(2013AA040403)
马 鑫(1980-),女,辽宁鞍山人,工程师,(E-mail)mx_lnfa@163.com。
王 鹤(1983-),男,辽宁鞍山人,讲师,(E-mail)21570453@163.com。
S24;TP273
A
1003-188X(2017)07-0062-04
猜你喜欢
今日农业(2022年13期)2022-09-15
今日农业(2021年12期)2021-11-28
今日农业(2021年17期)2021-11-26
今日农业(2021年9期)2021-07-28
军事文摘(2020年20期)2020-11-16
农民致富之友(2020年20期)2020-07-18
四川蚕业(2020年3期)2020-07-16
今日农业(2019年11期)2019-08-15
作文与考试·初中版(2018年23期)2018-09-10
农民致富之友(2018年18期)2018-07-14
