
3ZMP-360型马铃薯中耕起垄施肥机的改进设计
2017-12-16 09:02程鹏飞王琳琳李学强于文强
农机化研究 2017年7期
程鹏飞,王琳琳,李学强,于文强
(1.山东理工大学 机械工程学院,山东 淄博 255000;2.山东希成农业机械科技有限公司,山东 乐陵 253600)
3ZMP-360型马铃薯中耕起垄施肥机的改进设计
程鹏飞1,王琳琳2,李学强2,于文强1
(1.山东理工大学 机械工程学院,山东 淄博 255000;2.山东希成农业机械科技有限公司,山东 乐陵 253600)
针对现有马铃薯中耕起垄施肥机存在的地轮传动不连续、粗制施肥及仿垄成形不够理想等问题,对3ZMP-360中耕起垄施肥机驱动装置、肥箱调节装置和成形器进行了改进设计。采用驱动棘轮代替地轮传动,彻底解决了地轮空转、滑行导致肥箱不工作的问题;采用更换链轮调节传动比的方式设计的肥量调整装置,代替了原来靠调节施肥盒开口量的大小来控制施肥量的粗制方式,改进后的调整装置可根据不同土壤和不同品种的需求进行相应施肥,并且能够精确控制施肥量;采用弧面成形器代替原来平面成形器,垄形得到了改善,既保持了所需垄高,又能增加薯垄培土量,更有利薯种的生长发育。试验结果表明:改进后的马铃薯中耕起垄施肥机各项指标均符合国家标准要求,不仅提高了后期马铃薯生产量,而且有效地节约了化肥用量,降低了种植成本。
施肥机;施肥量;垄形;成形器;驱动装置
0 引言
随着我国马铃薯主粮化战略的推进,马铃薯机械产品也得到了快速发展,从前期播种到后期收获阶段基本实现了机械化。马铃薯的中耕、施肥是种植过程中重要的作业环节,中耕的主要作用是疏松土壤、增强透气性、提高地温、加速有机质的分解及提高土壤有效养分,以及防除杂草、害虫和调节水分、防旱保墒等。施肥的目的在于补充土壤中营养物质不足,满足马铃薯生长发育过程中对营养元素的需要[1]。
目前,马铃薯中耕起垄施肥尽管实现了机械化,但现有机型仍存在一些问题:大多采用行走地轮来驱动肥箱执行施肥,传动方式过于简单,不能解决地轮打滑导致的施肥卡滞与积肥问题;大多采用传统的施肥方式[2],通过手动调节施肥盒开口大小,来粗制控制施肥量,不能按实际客观需求来合理施肥,施肥效果不理想;采用平面成形器,起垄效果不佳,直接影响了后期马铃薯的产量。
针对上述问题,本文对3ZMP-360四垄中耕起垄施肥机驱动装置、肥箱调节装置和成形器进行了改进设计,增加了肥量调整装置和棘轮驱动方式,对成形器结构做了进一步的完善,并进行了田间试验。
1 整机模型及工作原理
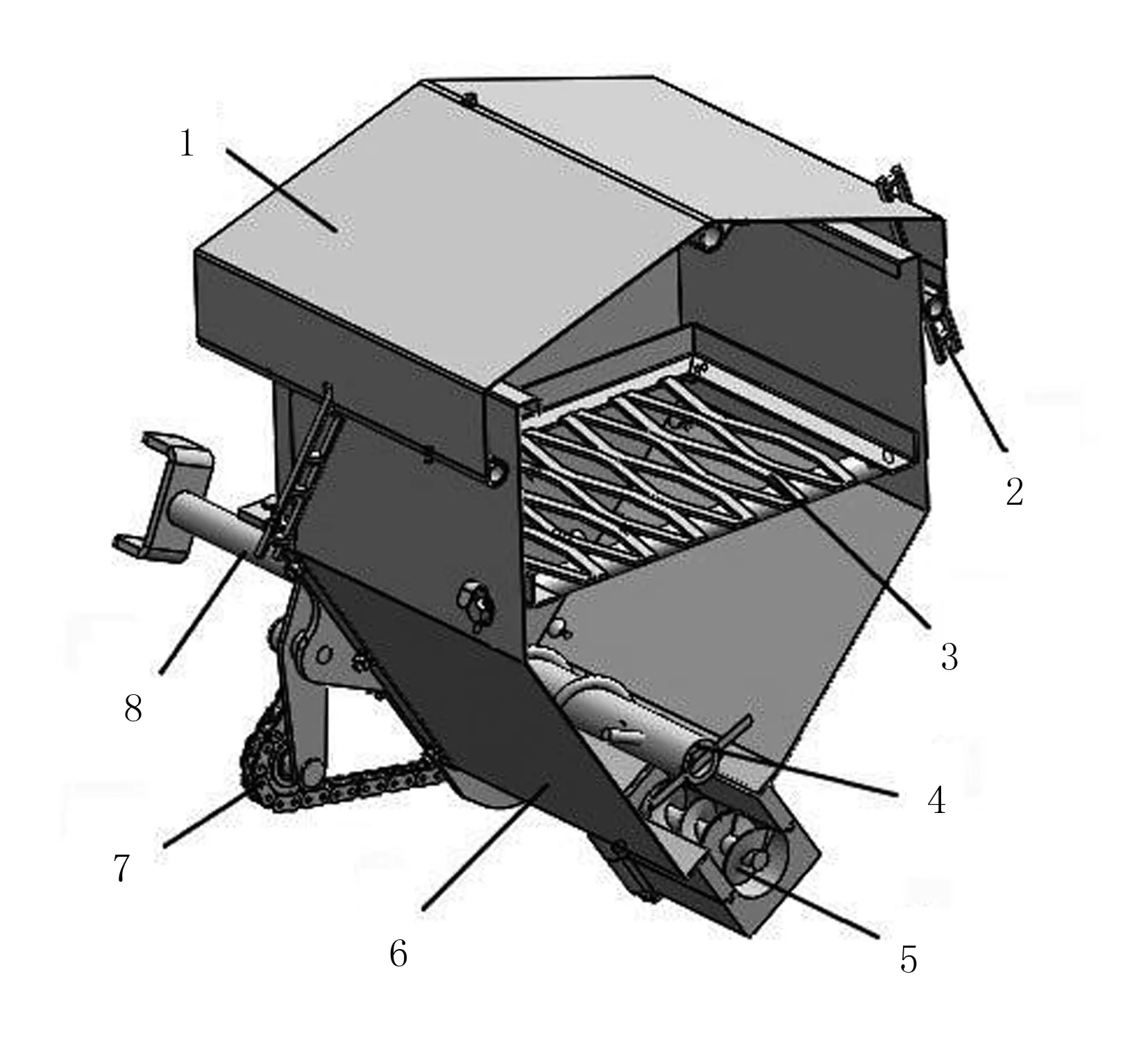
改进后的中耕起垄施肥机整机模型由驱动棘轮、连接传动箱、拉簧杆、肥量调整装置、肥箱体、牵引架、地轮、小弹性齿、侧护板 、松土器、成形器和仿垄压板组成,如图1所示。
该机牵引架与拖拉机采用三点悬挂方式连接。作业时,拖拉机拖动整机前进,小弹性齿将垄两边的杂草除掉,通过松土器、成形器与仿垄压板三者的配合,完成了起垄工作。其中,垄宽、垄高及培土量可通过改变松土器、成形器两翼夹角来调节。整机前进过程中,驱动棘轮挠地前行,将动力通过连接传动箱传递给肥量调整装置,最终控制肥箱精确施肥。
2 关键部件的改进设计
2.1 驱动装置的改进
现有中耕起垄施肥机采用的是地轮传动装置,如图2所示。其工作时,依靠与地面的附着力驱动自身运转,通过链轮传递动力给肥箱,来实现施肥功能;但该传动方式对外界环境适应性能差,若在湿滑或凹凸不平整的田地作业时,经常会发生地轮空转与滑行前进,直接影响施肥效果,导致减产。

图2 地轮驱动方式
棘轮驱动装置由驱动棘轮、拉杆、链条及菱形轴承等构成,如图3所示。驱动棘轮工作环境是界于空气与土壤之间的,而且持续不断地抓地前行,可将动力传递给肥箱调整装置,有着至关重要的作用。因此,对其采用65Mn材料且喷漆处理,既保证了高强度、高硬度性能,又有着良好的耐磨和防锈性能。在驱动棘轮周边结构采用了折弯处理,形成12个“挠爪”,具有良好的抓地性能,能够保证与地面的实时转动接触,充分解决了地轮在凹地、湿地作业中发生的空转、滑行问题。改进后的装置结构更加简单,并且适应多种工况作业,有着很强的适应能力。
2.2 肥量调节装置的改进
现有中耕起垄施肥机施肥量的控制是靠人工粗略调节实现的,需要调节手动旋钮来改变六方传动轴在施肥盒中的占据空间比,从而完成变量施肥;但该施肥方式没有施肥标准, 用户纯靠手动估测施肥, 极易出现实际施肥量与所需施肥量不相符的现象。同时,肥箱内无搅拌轴,经常出现施肥盒堵塞、积肥现象,还需要依靠人力将肥料敲碎,大大影响了作业效率与质量。其模型如图4所示。

1.链条护板 2.菱形轴承 3.拉杆 4.链轮 5.传动轴 6.链条 7.驱动棘轮
1.手动旋钮 2.六方传动轴 3.排肥口 4.施肥盒 5.肥箱体
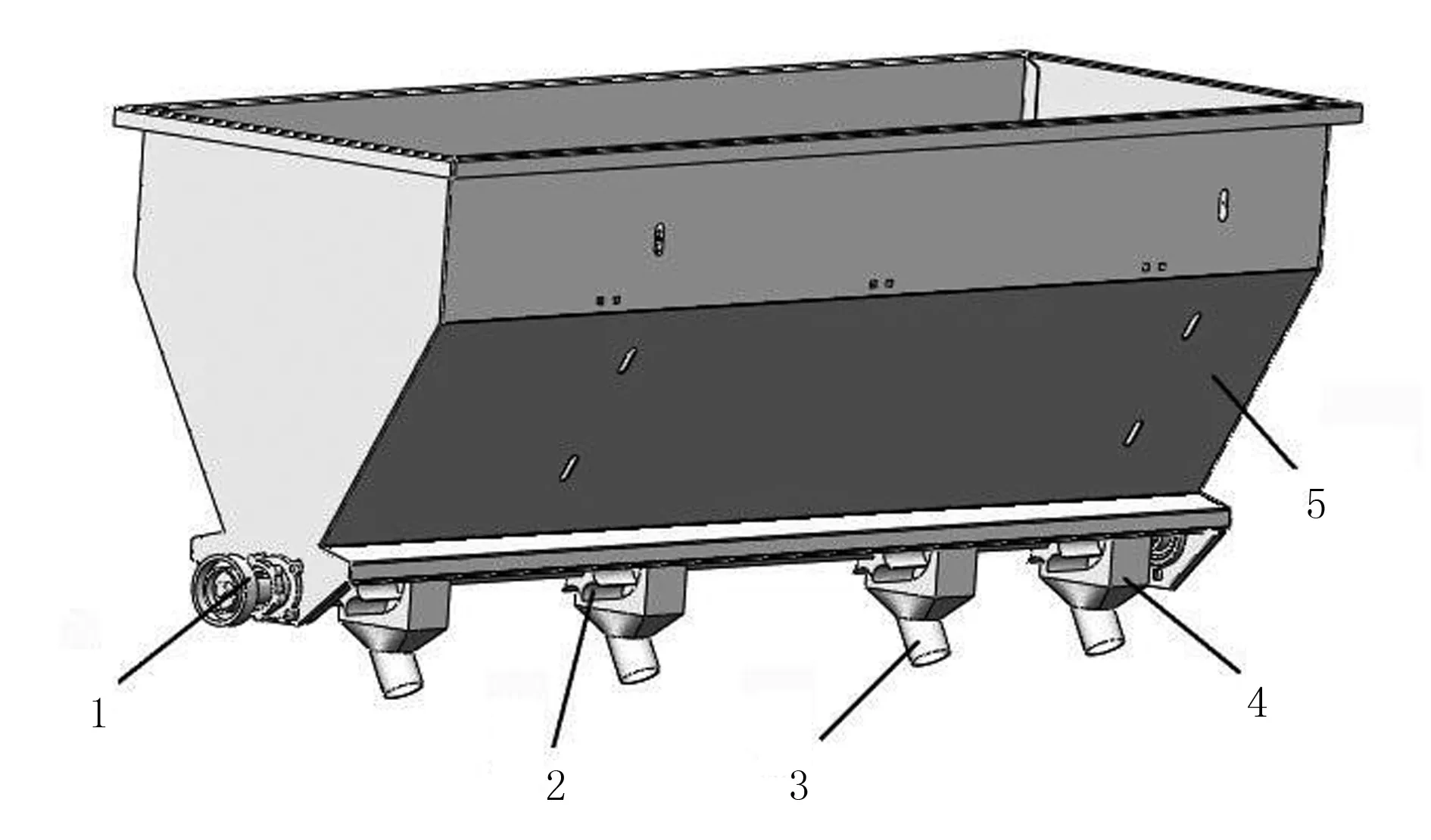
改进后施肥箱如图5所示。相比原施肥控制箱,其增设了搅拌轴,可将粘成团的肥料搅碎,解决了施肥盒堵塞问题;采用绞龙施肥代替了原施肥控制箱中的六方轴,避免了施肥盒积肥现象,而且排出的肥料流量是恒定的,施肥质量明显提高。
为实现精确施肥,在驱动棘轮与肥箱之间增加一肥量调整装置(见图6),其主、从动轴均水平布置,之间安装有张紧盘,且其轴线与主动轴轴线平行。张紧盘外端面上设有两个与张紧盘轴线平行的销轴,两个张紧链轮通过轴承安装在张紧盘销轴上,将链条缠绕成“S”型,达到张紧目的;弹簧一端连接张紧盘,另一端通过挂链卡在侧板上。当需要调节施肥量时,松开挂链使张紧盘顺时针旋转,链条松动即可更换链轮,调节链轮传动比改变绞龙转速,从而实现变量施肥,用户可根据施肥量调节表(见表1)精确控制施肥。
1.肥箱盖 2.连接橡胶条 3.肥料网筛 4.搅拌轴 5.绞龙箱 6.箱体 7.传动链条 8.拨杆传动轴
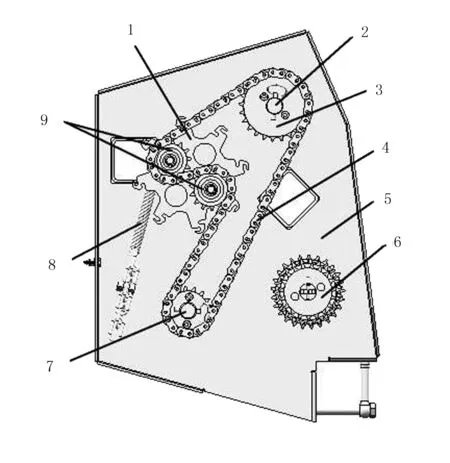
1.张紧盘 2.从动轴 3.从动链轮 4.传动链条 5.侧固定板 6.链轮组 7.主动链轮 8.张紧拉簧 9.张紧链轮
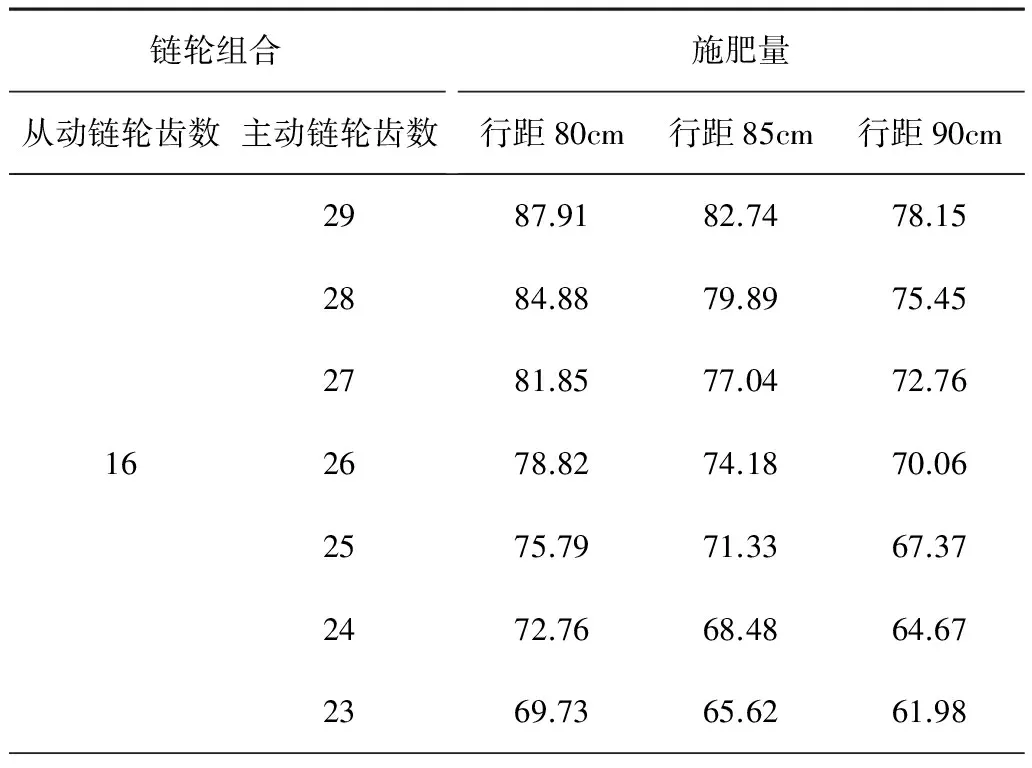
Table 1 Fertilizer regulation table kg·(667m2)-1

续表1 kg·(667m2)-1
2.3 成形器的改进
原起垄成形器采用的是平板刮土起垄原理,垄形截面为梯形,且结构比较单一,长时间工作容易磨损低尖,既降低了实用寿命,又影响了起垄效果。改进后的成形器垄面呈拱形,使得垄形更加饱满,增加了薯垄培土量,提高了土壤肥力,对产量增加有着明显效果。在成形器低尖处增加了可拆卸的耐磨护刃,增强了成形器的耐磨性能,提高了成形器的使用寿命。成形器改进前后对比如图7所示,效果对比如图8所示。
3 田间试验
3.1 试验条件
在马铃薯田间管理阶段,对改进后的3ZMP-360型号的四垄中耕起垄施肥机进行田间试验,选用约翰迪尔1254型四轮驱动式拖拉机,配套动力88.2kW,在总面积约为45hm2的5个面积均等小试验田,进行中耕起垄施肥作业;工作速度5km/h,工作行距90cm,最后对其作业效果进行实地检测并分析[3-5]。

图7 改进前后对比图
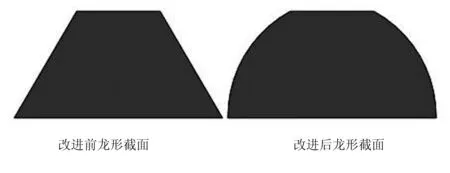
图8 改进前后垄形对比图
3.2 试验结果
按照中华人民共和国机械行业标准JB/T 8576-1997《旱田中耕追肥机 技术条件》的指标规定和相关农业机械试验方法,对总排肥量稳定性变异系数、各行排肥量一致性变异系数、各行耕深一致性变异系数、各行耕深一致性变异系数、起垄行距一致性变异系数、伤埋苗率及土壤膨松度6项指标进行相关检测分析,试验结果如表2所示。

表2 田间试验结果
4 结论
1)针对现有中耕起垄施肥机在湿滑或凹凸不平整的田地作业时,导致地轮空转与滑行前进的问题,将棘轮驱动代替地轮驱动的工作方式,提高了施肥质量,充分解决了地轮空转、滑行产生的漏施肥难题,且对恶劣工作环境有着很强的适应能力。
2)采用绞龙代替六方传动轴,同时在肥箱内增设了搅拌轴,避免了现有中耕起垄施肥机存在的肥料堵塞、肥箱积肥等问题,节省了人力,提高了工作效率与质量。针对实际施肥与所需施肥不相符的现象,在驱动棘轮与肥箱之间增加一肥量调整装置,实现了精确控制施肥。
3)针对现有中耕起垄施肥机成形器起垄效果不佳,实用寿命短的问题,采用了垄面呈拱形的成形器,且在成形器低尖处增加了可拆卸的耐磨护刃,提高了成形器的使用寿命,大大改善了起垄效果。
4)田间试验表明:改进后的马铃薯中耕起垄施肥机总排肥量稳定性变异系数、各行排肥量一致性变异系数、各行耕深一致性变异系数、各行耕深一致性变异系数、起垄行距一致性变异系数、伤埋苗率及土壤膨松度6项指标均符合国家标准要求,产品性能得到了极大改善。
[1] 王吉亮, 王序俭, 曹肆林,等.中耕施肥机械技术研究现状及发展趋势[J].安徽农业科学, 2013,41(4):1814-1816.
[2] 李志红, 李锦泽, 侯桂凤,等.变量施肥机的设计[J].农机化研究,2008(8):109-111.
[3] 吴爱兵, 朱德文, 陈永生,等.螺杆式有机肥施肥机的研制与试验[J].中国农机化学报, 2013,34(6):174-176.
[4] 蔺万宝, 孙思涛.马铃薯中耕施肥机的研制与试验[J].农机科技推广,2008(1):60.
[5] 王金武, 潘振伟, 周文琪,等.SYJ-2型液肥变量施肥机设计与试验[J].农业机械学报, 2015,46(7):53-58.
[6] 王秀, 赵春江, 孟志军,等.精准变量施肥机的研制与试验[J].农业工程学报,2004, 20(5):114-117.
[7] 张晓文, 尹雪琴.植物精密施肥机的研制与开发[J].农业工程技术:温室园艺, 2004(7):61-63.
[8] 孟长伊, 李广宇, 郝宇佳,等.一种多功能深松施肥机的设计与田间试验效果[J].山东农业科学,2014(12):79-83.
The Improved Design of 3ZMP-360 Potato Intertillage and Ridge Forming Fertilizer Applicator
Cheng Pengfei1,Wang Linlin2,Li Xueqiang2,Yu Wenqiang1
(1.School of Mechanical Engineering,Shandong University of Technology,Zibo 255000,China; 2.Xicheng Agricultural Engineering Machinery Co.,Ltd in Shandong Province,Leling 253600,China)
With the aim to solve the problems of discontinuous transmission of ground wheel rough fertilization and unfavorable imitation shape of ridge, the driving device, the adjusting device of and the former of the 3ZMP-360 potato intertillage and ridge forming fertilizer applicator were redesigned. The ground wheel driving was replaced by ratchet wheel, it could prevent the fertilizer box from not work caused by the idling and planing of ground wheel; the way of replacing sprockets replaced the way of adjusting the opening-degree of fertilizer box to adjust the transmission ratio, and the new adjustment device could fertilize basing on the need of different soil and potato varieties and control the of per acre exactly; the globoidal former was used to replace the plane former, it could improve the shape of ridge, keep the high of ridge and add the amount of soil of the ridge, which were good at the growth and development of potato. The test results showed that the indexes of new potato intertillage and ridge forming fertilizer applicator met the requirements of the national standard, and the new machine could improve the potato production and save the fertilizer application rate and reduce the cost of the farmers.
fertilizer applicator; fertilization; the shape of ridge; former; driving device
2016-05-11
国家技术创新项目(13C26213703376);山东省技术创新项目(201320113005);山东省重点研发计划项目(2015GNC112012)
程鹏飞(1990-),男,山东德州人,硕士研究生,(E-mail) 872989864@qq.com。
王琳琳(1988-),女,山东德州人,工程师,(E-mail) wllxstc123@163.com。
S224.1+4
A
1003-188X(2017)07-0053-05
猜你喜欢
装备维修技术(2022年7期)2022-07-01
煤(2022年6期)2022-06-13
农业工程学报(2022年1期)2022-03-25
装备维修技术(2021年42期)2021-03-15
农业开发与装备(2021年1期)2021-02-08
东北大学学报(自然科学版)(2021年1期)2021-01-15
少儿科学周刊·少年版(2020年9期)2020-03-04
汽车零部件(2018年11期)2018-12-08
制造技术与机床(2017年11期)2017-12-18
安徽农业科学(2015年34期)2015-10-21
