
农业机器人轨迹优化自动控制研究—基于BP神经网络与计算力矩
2017-12-16 07:01申一歌
农机化研究 2017年6期
袁 铸,申一歌
(河南工业职业技术学院,河南 南阳 473000)
农业机器人轨迹优化自动控制研究
—基于BP神经网络与计算力矩
袁 铸,申一歌
(河南工业职业技术学院,河南 南阳 473000)
以农业机器人精密轨迹优化自动控制为目标,在优化算法中引入BP神经网络与计算力矩法结合的自动控制器,旨在减少作业过程中的运动误差,提高其工作效率。首先,建立农业机器人数学模型,分析其运动学和动力学原理;然后,设计了农业机器人运动控制系统,引入BP神经网络对不确定动力学因素进行判断,并提出解决该因素的自适应学习法;最后,对该系统运用MatLab进行了仿真。试验表明:以BP神经网络与计算力矩法结合的自动控制器可以有效优化机器人运动路径,提高机器人整体作业效率,系统运行稳定、可靠性强,且对外部环境的干扰因素具有较强的自适应学习能力。
农业机器人;精密轨迹优化;BP神经网络;计算力矩法
0 引言
近年来,随着新农业种植模式和计算机技术的发展,智能机器人研究有了很大的突破,机器人在农业生产中的应用越来越普及。农业机器人需要边移动边作业,行走路径不仅仅是起、终点间最小距离,往往需要行走于整个作业区域,且环境一般复杂多变,因此常常需要在原规划上实施新的优化。路径优化是农业机器人作业过程中核心部分,其智能化主要体现在对运动范围及作业空间的规划上。本文采用BP神经网络与计算力矩法结合控制系统,对农业机器人运动轨迹进行计算优化,并采用MatLab来仿真预测农业机器人在作业中可能发生的某些碰撞及成功避开障碍物,同时提供路径优化及躲避障碍的策略。
1 BP神经网络与计算力矩原理
1.1 BP神经网络的结构和原理
神经网络是由简单处理单元构成的规模宏伟壮大且可同时进行分布处理的中心处理器,可以保存过往经验数据和行之有效的品性。神经网络主要从获得知识和保存知识两部分去模拟大脑。神经网络获得知识主要是通过实践并不断从外部学习得来了,而内部神经元的相互突触连接则主要用来存储信息。神经网络的基本结果如图1所示。

图1 神经网络的基本结构Fig.1 The basic structure of neural network
细胞体接受的信息一般先经树突传入,然后形成电脉冲由轴突传送给另一个神经元的突触,一直这样依次将信息传递下去。
BP神经网络是一种按误差逆传播算法训练的多层前馈式网络,能学习和存贮大量的输入、输出模式的映射关系,而计算前并不需要算法的具体数学方程。其基本原理为:通过对比输出值,求出误差值,并估计其前导层误差;然后,用该误差推导出更前一层的误差,最后,依次反传,求出其他各层的误差估计。BP神经网络结构如图2所示。
BP神经网络主要由输入层、隐含层、输出层组成,每两个相邻层的神经元都全部有关系,但同层之间无关。
假设不包含输入层,其有N0个元,设某网络有L层及输出为第L层,第L层有NK个元。设uk(i)表示第K层第i神经元所接收的信息,wk(i,j)为从第k-1层第j个元到第k层第i个元的权,ak(i)为第k层第i个元的输出,各层之间的神经元都有信息交换,则其输入输出关系可以表示为
(1)
则每个训练循环中按梯度下降时,其权重迭代公式为
(2)
(3)
(1≤l≤L-1)
(4)
BP神经网络算法的步骤为:①选定学习的数据,p=1,…,p,随机确定初始权矩阵W(0);②用学习数据计算网络输出;③用(2)式反向修正,直到用完所有学习数据。

图2 BP神经网络结构图Fig.2 BP neural network structure
1.2 计算力矩法原理
计算力矩一般采用前馈补偿的方法消除非线性因素产生的误差。设计控制算法时,首先应考虑需要参考的数学模型。为了最大限度减少计算量,参考模型应该满足的方程为
(5)
其中,r(t)是一个参考输入值,改进后有

(6)

根据改进后的参考模型,可以提出控制律为
u(t)=F1γ(t)+F2θ(t)+F3θ(t)
(7)
其中,F为N阶矩阵。
假设F1=M,F2=G-MΛ0,F3=N-MΛ1,则
(8)
式(8)即为该算法的控制量。
2 建立农业机器人数学模型
建立农业机器人的数学模型是跟踪优化其运行轨迹重要的前提,主要是根据机器人各种前行参数和控制量之间的变化关系,实现对机器人的控制,达到优化轨迹的目的。其数学模型结构如图3所示。
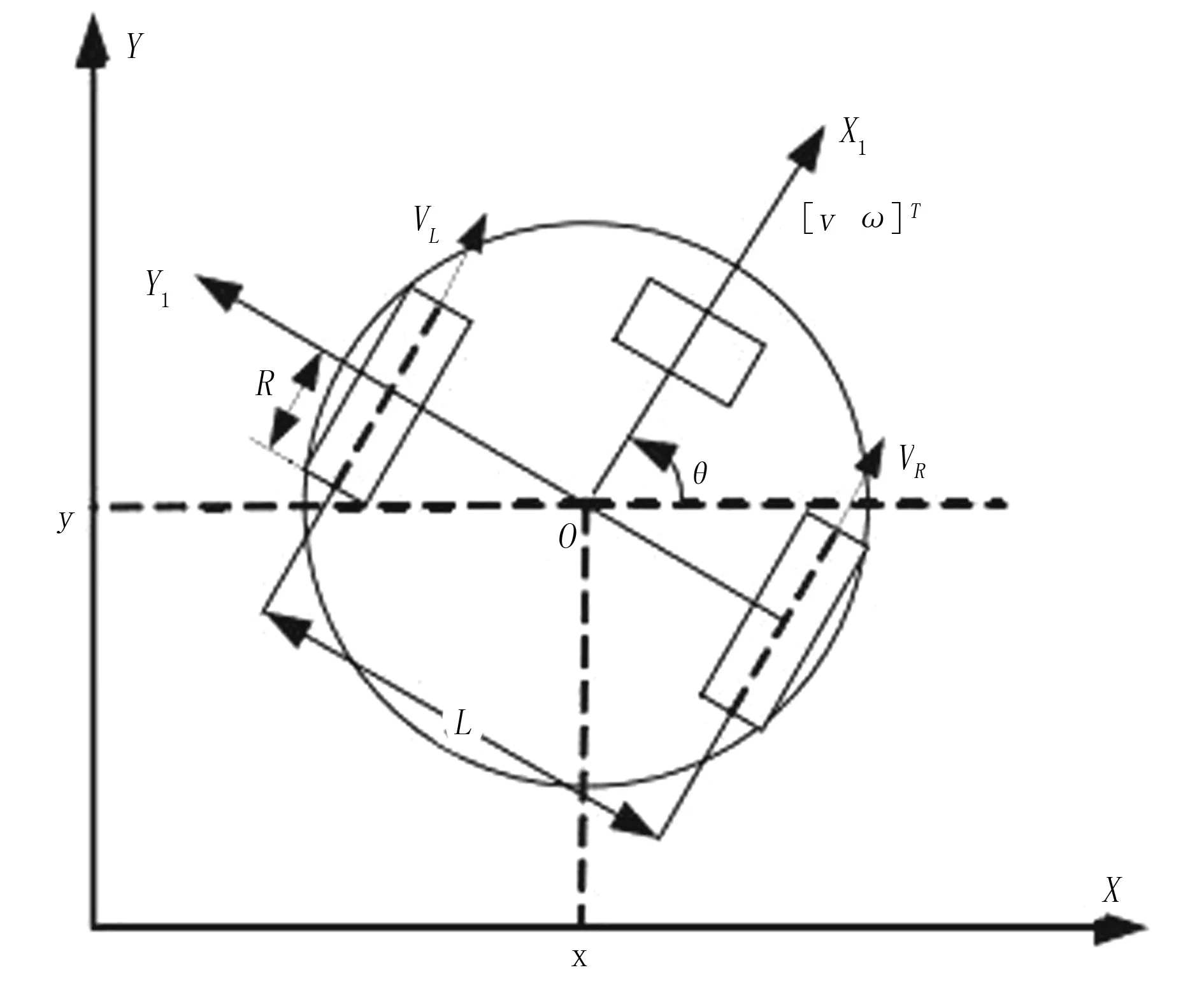
图3 农业机器人数学模型结构Fig.3 Mathematical model structure of agricultural robot
图3中,首先建立XOY全局坐标;然后在XOY上以其底盘质心建立X1OY1坐标系,机器人运行方向为X1OY1的X1轴方向;最后将机器人看作一个点,分析其位置和运行方向。其中,θ为横轴与运动方向之间的方向角;[v w]r为机器人的控制参数。
2.1 农业机器人运动学模型
在农业机器人作业过程中,车轮与农田发生接触的同时会产生滚动和滑动的现象。为了简化问题,根据建立的数学模型,本文只选择正常的滚动作为分析对象。
农业机器人运动学模型主要是描述其前进方向和速度之间的关系,比较直观地将运动问题转变为数学问题,则

(9)

(10)
其中,式(9)为机器人运动中的约束条件;式(10)为机器人的运动学模型。
农业机器人运动过程中,线速度v和角速度ω之间存在一定的关系,则
(11)
综合上面几个式子,可以得出农业机器人运动学模型为
(12)
2.2 农业机器人动力学模型
农业机器人动力学模型主要描述其运动方向、加速度和受力之间的关系。应用拉格朗日方程,农业机器人机械系统存在微分方程,则

(13)

根据以上定义,式(13)可改写为如下形式,即
农业机器人动力学系统的动态方程为

(15)
定义满秩矩阵S(q)为
S(q)=[S1(q),S2(q),...,Sn-m(q)]
(16)
则有
ST(q)A(q)=0
(17)
式(14)和式(17)结合后得到

(18)
这样可以发现:静态状态反馈可以简化为非完整约束的简单形式,农业机器人在直角坐标系中的位置可以根据向量推导出来。其中,(x,y)为机器人的参考位置;θ为其坐标角度。农业区机器人滚动时的约束条件为
(19)
因此可以确定矩阵S(q)为

(20)
然后可以得到参考点的运动学模型

(21)
3 农业机器人控制系统的设计
一般情况下,由于系统的动力学参数常常不确定,机器人的模型精度很难已知。为了克服动力学系统中不确定的因素,本控制系统特地采用计算力矩控制器,同时加上辅助的BP神经网络模糊控制器,通过两者共同作用,控制系统对路径的优化。控制系统的结构如图4所示。

图4 农业机器人控制系统的结构Fig.4 The control system structure of agricultural robot
由图4可知:该系统是闭环的,系统的总控制由模糊的BP神经网络控制和参数自适应的计算力矩控制器共同作用,可有效抑制农业机器人运动过程中产生惯性空间的不稳定因数,并保持最小的误差值收敛精度。
4 路径优化建模与仿真验证
4.1 农业机器人路径优化建模
在农业机器人寻径避障进行路径规划时,其需要采用最大线速度,在所有路径中选择出最优运动轨迹,并根据BP神经网络与计算力矩法复合控制系统特性,计算最优路径的运动时间和机器人车轮的线速度,进而调整运动状态,得到最优路径结果。图5农业机器人运动约束状态图。
图5中,A1、A2、A3是障碍物间距离;Cp是机器人的质心。最优路径运行所需时间为
TG=TT+TR
(22)
其中,TT为移动需要的时间;TR为旋转所需的时间。二者分别满足
(23)
其中,D为距离;A为角度。
根据农业机器人工作的特点及控制状态,再考虑其他可行路径的时间,用控制周期和线速度求解出每个运行周期内的运动距离和旋转角度,则

(24)
其中,T为运动周期。
根据质点间的运动距离和旋转角度,求出其农业机器人每段路径的移动距离和旋转角度;然后,根据新路径优化的适应度函数,即可求出最优解。

图5 农业机器人运动约束状态图Fig.5 The motion constraints state map of agricultural robot
4.2 仿真验证
为了验证系统是否可靠,本文对所设计的控制系统进行MatLab验证。其中,农业机器人运行环境为3m×3m的区域内,起点和终点分别为(0,0),(0,0),控制参数为0.01,初始移动方向误差为(0,0.45)T。每次进行仿真时,反复计算100次。仿真结果如图6所示,具体数据如表1所示。

图6 农业机器人路径优化仿真结果Fig.6 Simulation results of path optimization for agricultural robot表1 仿真结果具体数据Table 1 Simulation results of specific data

行走距离/m行走时间/s平移时间/s旋转时间/s轨迹优化4.6234.519.215.3
由图6和表1可以看出:农业机器人路径优化后的运动距离和时间都比较小,位置平均误差仅为0.085m,且加大了机器人的回转空间,使得运动轨迹比较圆滑,运行效率明显提高。
5 结论
针对农业机器人在田间移动路线过长、行进代价大及路径规划效率低的问题,提出了基于BP神经网络与计算力矩法复合控制农业机器人运动轨迹的研究方法,并利用MatLab对该系统进行了路径优化仿真验证。结果表明:该复合控制算法可以有效地优化农业机器人的移动轨迹,提高其运动效率,圆滑了农业机器人避障过程中的运动轨迹,使机器人运行效率有较大的提高;同时加强了运行过程中的稳定性,为果农节省了大量时间和经济成本,且该系统对外部环境的不确定因素具有较强的学习能力。
[1] 万梅芳.基于BP神经网络的最经济控制研究[J].无线互联科技,2014(2):133.
[2] 王欢,王玉博,尚萌,等.轮式移动机器人的主控制器设计[J].电工文摘,2014(5):20-22.
[3] 成伟明.移动机器人自主导航中的路径规划与跟踪控制技术研究[D].南京:南京理工大学,2007.
[4] 王会方.串联机器人多目标轨迹优化与运动控制研究[D].杭州:浙江大学,2011.
[5] 王新忠.温室番茄收获机器人选择性收获作业信息获取与路径规划研究[D].镇江:江苏大学,2012.
[6] 宋伟科.基于多机器人的开放式智能控制系统关键技术研究与开发[D].天津:天津大学,2012.
[7] 刘传领.基于势场法和遗传算法的机器人路径规划技术研究[D].南京:南京理工大学,2012.
[8] 张鑫.移动机器人导航中的轨迹跟踪与群集运动控制研究[D].西安:长安大学,2012.
[9] 过仲阳,韦桃源,李绿芊,等.BP网络在研究地下水咸淡水界面波动中的应用—以长江河口地区第二承压含水层为例[J].华东师范大学学报:自然科学版,2001(2):65-70.
[10] 陈卫东,董胜龙,席裕庚.基于开放式多智能体结构的分布式自主机器人系统[J].机器人,2001(1):45-50.
[11] 王树森,赵冬玲.一种基于附加动量法的改进BP算法[J].济源职业技术学院学报,2012(3):9-13.
[12] 姬江涛,王荣先,符丽君.轮履复合式农业机器人平台越障运动规划[J].拖拉机与农用运输车,2008(4):83-84.
[13] 张永江.模糊神经网络结构优化及系统性能评估研究[D].兰州:兰州理工大学,2013.
[14] 李素超.基于EM机制的BP神经网络训练算法研究及其应用[D].西安:西安电子科技大学,2013.
[15] 彭辉.轮式移动机器人运动轨迹控制技术研究[D].广州:广东工业大学,2008.
[16] 李艳.移动机器人链轨迹生成方法的研究与仿真[D].广州:华南理工大学,2011.
[17] 余华,吴文全,曹亮.BP神经网络的改进算法及其应用[J].电脑知识与技术,2009(19):5256-5258.
[18] 万亿泰.BP人工智能神经网络拓扑结构及算法[J].黑龙江科技信息,2009(28):84-85.
[19] 徐志英.一种改进的多层前馈神经网络结构研究[J].科学技术与工程,2009(17):4973-4977.
[20] 张洪宇.基于增强学习的移动机器人运动控制研究[D].长沙:国防科学技术大学,2008.
[21] 李洲.基于模糊逻辑的温室机器人运动控制研究[D].郑州:河南农业大学,2009.
[22] 张燕.基于神经网络的移动机器人轨迹跟踪控制[D].秦皇岛:燕山大学,2010.
[23] 张艳.基于RBF网络辨识的模型参考自适应控制系统分析与仿真[D].重庆:西南交通大学,2010.
[24] 张景然,沈牧文,杨建国. 基于模拟退火遗传算法优化BP网络的数控机床温度布点优化及热误差建模[J].机床与液压,2014(23):1-4,50.
[25] 由嘉. 基于神经网络技术的空中交通管制辅助决策支持系统[D].西安:西北工业大学,2005.
[26] 贺红林,何文丛,刘文光,等.神经网络与计算力矩复合的机器人运动轨迹跟踪控制[J].农业机械学报,2013(5):270-275.
[27] 苏渊,刘赟.基于BP人工神经网络改进算法的绝缘子污秽预测[J].重庆电力高等专科学校学报,2013(3):46-49.
[28] 周燕艳.基于改进的BP算法的RoboCup防守策略研究[J].海军工程大学学报,2011(6):40-43.
[29] 谢浩.基于BP神经网络及其优化算法的汽车车速预测[D].重庆:重庆大学,2014.
[30] 梁捷,陈力.基于标称计算力矩控制器的双臂空间机器人惯性空间轨迹跟踪的模糊自适应补偿控制[J].工程力学,2010(11):221-228.
[31] 刘松国.六自由度串联机器人运动优化与轨迹跟踪控制研究[D].杭州:浙江大学,2009.
Keywords:agriculturalrobot;precisiontrajectoryoptimization;BPneuralnetwork;computationaltorquemethod
AutomaticControlofTrajectoryOptimizationforAgriculturalRobot—BasedonBPNeuralNetworkandComputationalTorque
YuanZhu,ShenYige
(HenanPolytechnicInstitute,Nanyang473000,China)
Inthetrajectoryoptimizationofprecisionagriculturerobot,takingautomaticcontrolasthegoal,itintroducedtheoptimizationalgorithmcombinedwithBPneuralnetworkandthecomputedtorquemethodofautomaticcontroller,whichintendedtoreducemotionerrorsduringtheworkandimprovetheworkefficiency.Inthispaper,itfirstestablishedmathematicalmodelofagriculturalrobot,kinematicsanddynamicsanalysis;then,itdesignedtheagriculturalrobotmotioncontrolsystembyusingBPneuralnetworktouncertaindynamicsfactorstojudge,andputforwardthesolutiontothefactorofadaptivelearningmethod.FinallythesystemusedMATLABsimulation.ExperimentalresultshowsthatthecombinedwithBPneuralnetworkandthecomputedtorquemethodofautomaticcontroller,whichcaneffectivelyoptimizetherobotmotionpath,andimprovetheoveralloperationefficiencyoftherobot,thesystemisstableandreliable,andtheexternalenvironmentinterferencefactorswithstrongadaptiveabilitytolearn.
2016-03-03
河南省自然科学基金项目(2015GZC155);南阳市科技攻关项目(KJGG36)
袁 铸(1982-),男,河南南阳人,讲师,硕士。
申一歌(1982-),女,河南南阳人,讲师,硕士研究生,(E-mail)yuanzhu1982@hnpi.cn。
S126;TP242.6
A
1003-188X(2017)06-0033-05
猜你喜欢
中国特种设备安全(2022年2期)2022-07-08
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
电子制作(2019年19期)2019-11-23
电子制作(2019年24期)2019-02-23
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09
重型机械(2016年1期)2016-03-01
