
薰衣草收割机切割高度可调节机构的设计及运动仿真
2017-12-16 09:15田东洋刘姣娣李卫敏
农机化研究 2017年5期
田东洋,刘姣娣,李卫敏
(石河子大学 机械电气工程学院,新疆 石河子 832000)
薰衣草收割机切割高度可调节机构的设计及运动仿真
田东洋,刘姣娣,李卫敏
(石河子大学 机械电气工程学院,新疆 石河子 832000)
薰衣草生长期长达十几年,长期农机入地作业造成了地面高低不平,既要花穗收割干净,同时不能伤害保留的茎秆,确保薰衣草后续的生长。为此,设计了高度可调节机构使薰衣草切割后的茎秆保留高度一致。同时,对仿形机构进行了受力分析,确定了影响仿形性能的初始作用角度α、上仿形角α1、连杆长度L1。根据初始工作角和最大下仿形量,设计出的仿形杆长度为 440mm,最大上仿形量为 214mm。最后,应用仿真分析软件Adams进行运动模拟,结果表明:仿形机构可实现上下仿形和翻转,上下仿形量可达到290 mm,翻转角度达到90°,满足薰衣草收割机的切割仿形量。该机构为研制薰衣草收获机的研制提供了依据。
薰衣草收割机;切割装置;仿形;运动仿真
0 引言
薰衣草属于无性繁殖,一般采用3~4年生植株作为母株,于秋天植株停止生长后或早春植株萌动前,将母株地上部分的枝条距地面80~100mm剪去(如图1中a),然后堆拥肥土使枝子稍露出土面,如图1所示[7]。这一生长状况,造成地面不平整,而目前的收割机械,并不适用于收割薰衣草。长年的人工收割及机器进地作业也造成了地面的不平整。薰衣草的采花部位过高,有花收不回来,会减少产花量,造成浪费;剪切部位过低,会影响薰衣草植株的生长。这就要求收割后的薰衣草茎秆高度保持一致性,且能达到最低高度要求。平行四杆仿形机构是一种可以根据地形调节作业高度的机构:崔涛[1]等设计了平行四杆机构,实现同位仿形;赵淑红[2]等设计的平行四杆机构能实现上下和左右双向仿形。
薰衣草生长在垄台上,至成熟期采收时间紧迫。每年大规模采收两次,夏花一般在6月下旬至7月中旬,秋花在9月下旬至10月上旬。由于盛花期短,过早或过晚采收都会影响薰衣草品质。因此,采用机械收割以提高采收效率,且使收割过程中收割高度一致。本文根据国内薰衣草种植模式,采用一种侧悬挂于拖拉机上的收割装置,设计一种固定于拖拉机一侧的调节高度的三液压活塞杆仿形机构。该机构能人为适时调节收割装置距离地面的高度,完成薰衣草的收割,也能在收割装置不工作时使其向上翻转,便于拖拉机行走。

(a) 剪枝 (b) 堆拥肥土
1 整机工作原理及机构设计
1.1 工作原理
整个收割装置侧悬挂于拖拉机一侧,仿形机构连接拖拉机和收割机割台。拖拉机前进时,液压马达转动,带动往复式切割器工作,往复式切割器上方的皮带链也由液压马达带动;转动中的皮带链能收拢薰衣草,往复式切割器切割薰衣草,切掉的薰衣草由传送装置进行输送,如图2所示。
1.2 仿形机构
仿形机构主要由主臂活塞杆、辅臂活塞杆及连杆组成[3],如图3所示。左边连接架与切割台部分成为一体,右边连接架固定于拖拉机上;主臂活塞杆通过轴销与左右连接架分别铰接于F点和E点,两个辅臂活塞杆与连接架铰接于A点、B点、C点、D点[4];两连杆与连接架为铰接。工作过程中,液压控制主、辅臂活塞杆,两主臂活塞杆绕A、D点转动,辅臂活塞杆绕E点转动,两连杆绕H、K点转动;收割工作台可向上或者向下移动,从而调整距离地面的高度;当辅臂活塞杆不动,两主臂活塞杆工作时,可调整收割台与地面所成角度,即整个收割装置可进行翻转。

1.传送装置 2.液压马达 3.仿形机构 4.皮带链 5.往复式切割器

1.主臂活塞杆 2.辅臂活塞杆 3.连杆
2 仿形机构的受力分析
为探究仿形机构施加的作用力与整个装置的质量之间的关系,现对其进行受力分析,找出各参数变化的影响。
2.1 上下仿形时受力分析
仿形机构受力分析如图4所示。

(a) 仿形机构简图 (b) IJ杆空间受力图
当辅臂活塞杆施加作用力而主臂活塞杆作为连杆用时,可使I1B1杆上下移动,即收割装置离地面的距离可实现上下调整。对IJ杆进行受力分析,如图3(b)所示。由在xy平面上稳定工作的受力平衡条件可得
Fsinβ2-2F1-2F2sinβ1-G=0
(1)
Fcosβ2-2F2cosβ1=0
(2)
令IJ杆长为a,由力矩平衡可得
(3)
由式(1)、式(2)、式(3)可得
(4)
式(4)中:β1为IH杆、JK杆在运动过程中与地面所成的夹角;β2为EF杆所代表的辅臂活塞杆在运动过程中与地面所成的夹角;F为辅臂活塞杆对IJ杆施加的作用力;F1为IB杆、JC杆分别对IJ杆的作用力;F2为IH杆、JK杆分别对IJ杆的作用力;G为整个侧悬挂装置对IJ杆施加的重力。
由式(4)知:辅臂活塞杆所要施加的力F,主要与β2、G有关。当β2缓慢变大时,F也随之增大;反之,F变小。当G变大时,F也随之增大;反之,F变小。另外,F还与角β2、β1之差有关,差越大,F越小;差越小,F越大。当G一定时,F1变化不大,在整个装置上升过程中,β2变大,角β2、β1之差变小,F相应变大,即整个侧悬挂装置在上升过程中,所要施加的作用力不断变大。
2.2 侧悬挂装置翻转时受力分析
薰衣草收割结束或不工作时,该机构可使其向上翻转,便于拖拉机行走。侧悬挂装置翻转时受力分析如图5所示。当主臂活塞杆施加作用力而辅臂活塞杆作为连杆时,可使I1B1杆绕I1点转动,即收割装置上BI、CJ杆分别绕I、J点转动,BCJI面不再与地面垂直而是成一锐角,整个收割装置实现完全翻转,理想状态下的结果是BCJI面转动到与地面平行。

图5 侧悬挂装置翻转过程中受力分析图
取BI、CJ杆长为b,由力矩平衡可得
(5)
(6)
其中,M为整个侧悬挂机构对BI、CJ杆施加的总力矩;F′为两个主臂活塞杆所代表的BA、CD杆分别对BC杆的作用力;γ1为仿形机构作折叠动作时主臂活塞杆与地面所成的夹角;γ2为BI、CJ杆与竖直面所成的夹角。
由式(6)可知:F′主要与M和角γ2、γ1之差有关。当M不变,γ2-γ1从负值到零再到正值,F′由小变大,再由大变小。
3 仿形机构主要尺寸及相关参数确定
辅臂活塞杆在收割台距离地面的距离为零时的初始作用角度α,杆长L1为主臂活塞杆所代表的液压缸在下极限位置的伸长长度,杆长L2为辅臂活塞杆代表的液压缸体的长度。仿形机构上下移动参数如图6所示。
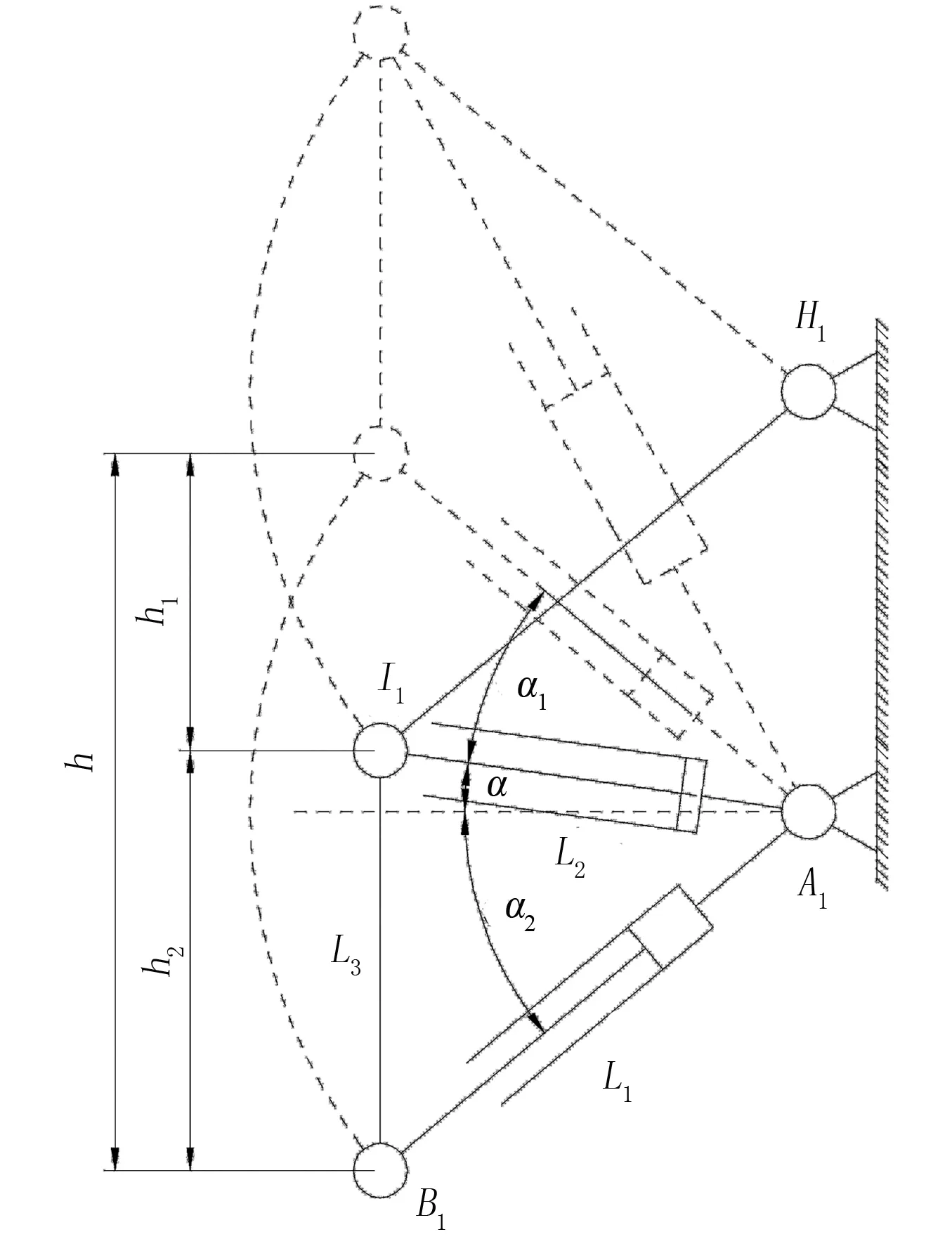
图6 上下移动中的参数
3.1 初始作用角度α
为使整个悬挂装置稳定工作且能达到设计所要求的仿形量,即收割台距离地面的变动范围,需确定各个杆件的长度。整个侧悬挂机构稳定升起,需确定适当的初始作用角度α。
由图5可知:上下总仿形量的大小为
(7)
其中,α2为收割台距离地面的距离为零时L1杆与地面所成的角度;α为初始作用角度;α+α2为下仿形角;α1为上仿形角。
由式(7)可知:若要上下仿形量相同,仿形机构的上下拉杆越长,则辅臂活塞杆与地面所成角度变化范围越小;上下拉杆越短,辅臂活塞杆与地面所成角度变化范围越大。为使侧悬挂机构能够稳定工作,角度变化范围越小越好。因此,上下拉杆长一些有利;但拉杆加长,会使结构不紧凑,重心偏移,对于悬挂式的收割装置横向稳定性不利。
一般播种机上的仿形机构的牵引角α为0°~10°,为使辅臂活塞杆能够施加初始作用力,现取α为5°,理想条件下α=0°。L2为所选辅臂活塞杆所代表的液压缸体的长度L;L3为拖拉机的离地间隙H,tanα2=H/L。选东方红SE250拖拉机离地间隙为325mm,L2液压缸体长度为400mm,则α2=arctan(H/L)=38.66°。要想达到此理想角度,割台与地面距离为0,则下仿形角为α+α2=5°+38.66°=43.66°。现α为5°,仿形机构所要求的收割台距离地面的距离在0~30cm范围内变动,L=400mm,h1=h2=150mm,则tan(α+α1)=(h1+Lsinα)/Lcosα,α+α1=arctan(h1+Lsinα/Lcosα)。上仿形角α1为19.89°。
3.2 确定杆长L1、L2、L3
设计上下总仿形量h=300mm,L2为初选液压缸体的长度L,取L=400mm。L1cosα2=Lcosα,L1=Lcosα/cosα2=400×cos5°/cos38.66°=510.30mm;L1sinα2=510.30×sin38.66°=318.78mm>h2=150mm;L1sin(α+α1)=510.30×sin(5°+19.89°)=214.65>h1=150mm。
由公式(7)得

取BI、CJ杆长度L3=300mm。当左连接杆翻转至与地面平行时,且L1杆转至上仿形角,令伸长后的杆长为C,则有
经计算优化,最后取得主臂活塞杆长度L1=440mm,辅臂活塞杆长度L2=350mm,BI、CJ杆长度L3=250mm。
4 基于ADAMS的运动模拟分析
为了验证该机构的仿形效果,应用ADAMS软件对该机构进行运动模拟[5]。主臂活塞杆和辅臂活塞杆各施加一个移动驱动,对该机构左连接杆施加20 000N竖直向下的力和10 000N·m的转矩,右连接杆与地面固定。对机构进行简化,建立其在ADAMS仿真环境下的模型,运行仿真得到左连接架的运动轨迹[6]。图7为左连接架相对于地面的运动轨迹图,其位移量即为上下的总仿形量。图8为左连接架的转动轨迹图。

图7 左连接架竖直向上位移图

图8 左连接架旋转角度图
图7反映左连接架离地面的高度随时间的变化情况。其最大位移量在280~300mm之间,而薰衣草剪切位置在距地面80~100mm剪去, 能满足高度要求。图8中,左连接架相对于IJ轴线的角度变化,其角度变动范围在0°~95°之间,也即左连接架能翻转90°至与地面平行。在整个装置上升过程中,由于受到自身重力和液压缸作用力的影响,其位移变化为非线性变化,但没有明显的波动,稳定性可靠。
5 结论
1)对仿形机构进行受力分析,影响作用力大小的主要因素有辅臂活塞杆与地面所成初始作用角度α,侧悬挂装置重量G及上仿形角α1、下仿形角α2。
2)对仿形机构的尺寸及各参数进行了设计,在辅臂活塞杆与地面所成工作角为5°、初选辅臂活塞缸体的长度为400mm及拖拉机离地间隙已知的条件下,计算得出割台距离地面为零时的上仿形量为214mm,总仿形量达到533mm,能满足仿形要求。
3)用优化后的数据,运用仿真分析软件ADAMS软件对仿形机构进行运动分析,上下总仿形量达到290mm,整个侧悬挂装置能翻转90°,表明该仿形机构能满足薰衣草收割高度要求。
[1] 崔涛,张东兴,杨丽,等.玉米精量播种机同位仿形半低位投种单体设计与试验(英文)[J].农业工程学报,2012(S2):18-23.
[2] 赵淑红,蒋恩臣,闫以勋,等.小麦播种机开沟器双向平行四杆仿形机构的设计及运动仿真[J].农业工程学报,2013(14):26-32.
[3] 冯国勇,朱曼江,高瑞林,等.装载机液压臂活塞杆运动仿真分析[J].机械研究与应用,2012(5):24-26.
[4] 马华永,王卫兵,王坤,等.平行四杆仿形机构设计及运动仿真[J].机械工程师,2014(7):121-123.
[5] 董江华,姜大成.基于ADAMS的虚拟样机技术实践[J].机械工程师,2009(1):85-86.
[6] 党党,汤军社,贺春荣,等.机械系统的建模与仿真[J].中国制造业信息化,2008(7):26-29.
[7] 陕西省轻工业科学研究所日化研究室.薰衣草的栽培与加工[M].北京:轻工业出版社,1979:29-30.Abstract ID:1003-188X(2017)05-0159-EA
Motion Simulation and Design of Lavender Harvester Cutting Height Adjustment Mechanism
Tian Dongyang, Liu Jiaodi, Li Weimin
(College of Mechanical Electrical Engineering, Shihezi University, Shihezi 832003,China)
Lavender can grow for ten years, machines work into the ground long-term resulted uneven ground. In order to ensure that lavender harvesting machine cut lavender stems reservations highly consistent, we should spikes harvest clean, while not hurt the rest of the stem to ensure that lavender subsequent growth, this paper designed harvester cutting height adjustment mechanism which make stem keeping same height. The profiling performance parameters were determined through force analysis. According to the initial work angle and the maximum amount under the profile designed contoured rod length is 440 mm, the maximum amount of the profiling 214 mm. Finally, Adams software application for motion simulation optimization, by motion simulation shows that profiling mechanism can realize up and down and rotate, top and bottom profiling could reach 290 mm, rotate angle could reach 90°, to meet the cut like lavender harvester shaped volume. The agency for the development of lavender harvesting machine provided gist.
lavender harvesting machine; cutting device; profiling; motion simulation
2016-04-22
兵团工业及高新技术科技攻关与成果转化计划项目(2015AB020);八师中小企业专项(2014QY04)
田东洋(1990-),男,河南驻马店人,硕士研究生,(E-mail) tiandongyang@sina.com。
刘姣娣(1975-),女,湖北武冈人,副教授,硕士生导师,(E-mail)shzdxljd@163.com。
S817.11+1
A
1003-188X(2017)05-0159-04
猜你喜欢
沈阳理工大学学报(2022年3期)2022-08-11
山东交通科技(2020年2期)2020-08-13
中国化妆品(2019年12期)2019-04-01
中国设备工程(2018年15期)2018-08-08
中学生数理化·八年级物理人教版(2018年5期)2018-06-21
作文周刊·小学三年级版(2018年2期)2018-02-06
现代园艺(2017年11期)2017-06-28
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
中国新技术新产品(2014年21期)2014-03-28
火炸药学报(2014年3期)2014-03-20
