
残膜回收机拾膜卸膜机构运动分析及实验
2017-12-16 09:15谢建华孙超伟杨业龙曹晓冉
农机化研究 2017年5期
谢建华,孙超伟,杨业龙,曹晓冉
(新疆农业大学 机械交通学院,乌鲁木齐 830052)
残膜回收机拾膜卸膜机构运动分析及实验
谢建华,孙超伟,杨业龙,曹晓冉
(新疆农业大学 机械交通学院,乌鲁木齐 830052)
根据搂草机滑道弹齿机构设计了杆齿式残膜回收机,对机构运动进行了仿真分析和正交试验。运用仿真分析得出杆齿末端的运动轨迹和不同速比下杆齿末端的加速度曲线,并利用土槽台架试验系统,对影响机具拾膜率及卸膜率的行进速度、速比(机具行进速度与杆齿轴转动线速度比)、杆齿入土深度3个主要因素进行了正交试验。试验结果表明:速比的变化对机构拾膜率的影响程度大于机具行进速度和杆齿入土深度的变化,当机具行进速度为0.85m/s、速比为1.5、托膜铲入土深度为50mm时,杆齿式拾膜机构、卸膜机构的拾膜率和卸膜率均达到优水平。
残膜回收;拾膜机构;卸膜机构;正交试验
0 引言
地膜覆盖栽培技术是一种先进的农业栽培技术,自20世纪70年代引入我国后得到大力推广,目前已经覆盖多个省市[1-3]。我国大部分地区使用的地膜是厚度为0.006~0.008mm的超薄农膜,这种地膜易破损,抗拉强度差[4]。随着塑料农膜用量的不断增加,加之不能有效及时回收,致使农田残膜堆积越来越多,堆积的残膜不仅破坏土壤结构,而且影响作物的生长发育,将最初使用地膜带来的作物的高产、优质逐渐转为低产、劣质[5-6]。为了解决地膜使用后造成的“白色污染”,我国农机科研人员针对残膜回收技术展开了研究并制造出多种残膜回收机具,现有残膜回收机常用的捡拾机构有轮齿式、杆齿式、伸缩杆齿式和链齿式等几种[7-8]。其中,杆齿式结构相对简单,地膜收净率较高,具有较好的研究意义[9-10]。衡量杆齿式拾膜机构的主要指标是机构的拾膜率和卸膜率,对于机构自身来说,杆齿末端的运动姿态和杆齿的入土深度均对拾膜机构的拾膜率有一定的影响,而杆齿的运动姿态与杆齿轴的转速和机具行进速度密切相关。为了确定杆齿式拾膜机构的最优工作条件,针对优化滑道后的杆齿式拾膜机构进行运动机理分析,通过UG软件对拾膜、卸膜机构进行三维建模和运动仿真,观察拾膜卸膜机构的运动情况,排除机构运动干涉。同时,运用正交试验,研究机具行进速度、杆齿轴转速及杆齿入土深度等工作参数对拾膜率、卸膜率的影响。为杆齿式拾膜机构的设计优化和最优工作条件的选择提供理论和试验依据。
1 机具的结构及工作原理
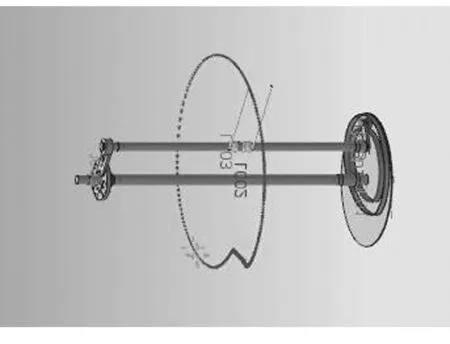
杆齿式残膜回收机主要由杆齿式捡拾机构、卸膜机构、地轮、集膜箱、机架、链传动系统及悬挂架等组成,如图1所示。杆齿式残膜回收机具工作时,拖拉机牵引机具前进,地轮驱动捡拾机构逆时针转动,杆齿连同杆齿轴在凸轮滑道的约束下,逆时针旋转低头入土,先将残膜挑起,在杆齿轴和凸轮滑道的作用下,杆齿再平移回收。卸膜机构由杆齿式捡拾机构上的链传动带动,实现卸膜机构与捡拾机构的同向转动。卸膜机构的卸膜刮板在杆齿平移回收阶段与杆齿接触,将杆齿上的残膜捋至集膜箱完成回收。

1.悬挂架 2.杆齿式捡拾机构 3.地轮 4.链传动系统 5.卸膜机构固定架 6.卸膜机构 7.集膜箱 8.机架
2 拾膜、卸膜机构运动学分析
2.1 拾膜机构运动学分析坐标系建立
拾膜机构工作示意图如图2所示。

图2 机构工作示意图
为了规范杆齿式拾膜机构的运动分析,在进行运动学分析前,首先需要确定分析采用的坐标系及角速度方向,统一设定分析中用到的常量和变量。
1)设定坐标系方向。为了便于对杆齿式拾膜机构的运动进行分析,需要建立机构的数学模型,在建模之前,首先设定坐标系,确定坐标方向。本文采用右手笛卡尔坐标系对杆齿式拾膜机构进行运动学和动力学分析。机构中各部分的直线位移和作用力均沿坐标正半轴方向为正,相反为负。
2)设定旋转矢量的方向。本文中角位移的设置以X轴正方向为始边,角位移、角速度、角加速度及力矩均以逆时针转动方向为正,反之为负。
3)设定坐标原点根据拾膜机构结构的工作特点将坐标原点设定为芯轴的转动中心。
2.1.1 位移模型
如图2所示:杆齿轴在带座轴承的带动下绕芯轴转动,若残膜回收机具前进速度为零,则各点的相对位移方程如下:
杆齿末端G点相对位移方程为
(1)
滚子中心B点的相对位移方程为
(2)
当机具前进速度为V时,杆齿末端G点的绝对位移为
(3)
滚子中心F点的绝对位移为
(4)
2.1.2 速度模型
将上述各点的绝对位移方程对时间进行求导,可以得到绝对速度方程。当杆齿轴匀速转动时,其角速度ω为常数,杆齿末端G点的绝对速度为
(5)
滚子中心F点的绝对速度为
(6)
2.1.3 加速度模型
对各点角速度和绝对速度方程分别对时间t求导,则求出各点角加速度和加速度方程。杆齿末端G点的加速度为
(7)
滚子中心F点的加速度为
(8)
式中 v—机具前进速度;
t—时间;
ω—杆齿轴转动角速度;
lNG—杆齿长度;
R—杆齿轴旋转半径;
φ0—凸轮滑道初始摆角;
φ—凸轮滑道摆角;
ψ—曲柄与杆齿的夹角。
由图3可知:滑道初始摆角φ0为
(9)
式中 r—凸轮滑道基圆半径。
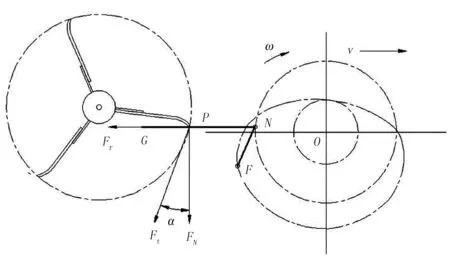
图3卸膜机构示意图
2.2 卸膜机构的运动学分析
研究型资源是学科建设与发展的基础。为了实现更深层次的文献服务,可以考察资源与学科评估、学术评价的相关性,以ESI,SCIE,NATURE自然指数评估等来源期刊为参照,分析学科期刊资源的保障率、保障水平[11],为学术期刊的调整与订购提供依据。对用户迫切需要的领域权威期刊或新兴期刊,可以采用单电子期刊订购模式,为用户提供精准服务。
卸膜机构主要由卸膜辊和卸膜刮板组成。杆齿式残膜回收机构工作时,动力输出通过链传动带动拾膜机构杆齿芯轴转动,杆齿芯轴上装有双排链轮,杆齿芯轴转动的同时通过链传动带动卸膜辊转动,完成卸膜工作。为保证没有残膜漏卸,一排杆齿一次拾膜过程卸膜刮板至少进行两次刮捋动作,选取卸膜轮转速与杆齿轴转速定比为2∶1。
2.2.1 卸膜机构的运动模型的建立
由于卸膜机构在整个过程中匀速转动,所以卸膜刮板的不存在角加速度,卸膜刮板末端P点速度为
v=ω·r
(10)
式中 r—卸膜刮板末端到卸膜辊旋转中心距离;
ω—卸膜辊转动角速度。
卸膜刮板末端P点位移为
S=v·t
(11)
式中 S—卸膜刮板末端P点位移;
t—卸膜辊的转动时间。
3 杆齿式拾膜机构运动仿真
拾膜机构是残膜回收机具的关键部件,其运动过程直接影响机构的拾膜性能及卸膜性能[11]。通过仿真软件对建立的机构模型添加约束和运动驱动,运用软件对机构的实际工作情况进行仿真,观察机构在工作过程中各部件在工作位置的变化和重要部件的速度变化,为机构的性能分析提供参考依据。
3.1 建模及施加约束
通过UG软件对机构进行三维建模及虚拟装配,为了使仿真模型可以模拟机构实际工作情况,按照机构中各个零部件之间的连接方式和相对运动方式,对零部件添加约束和驱动,完成机构的运动仿真。表1为拾膜机构零部件间的约束。

表1 杆齿式拾膜机构的约束
为拾膜机构设定驱动,整体机构移动副上添加水平移动速度(机具行进速度)为0.85m/s,杆齿芯轴分别按照不同的速比(机具行进速度与杆齿挑膜线速度比)对应不同的转速,速比为1.0、1.3、1.5时分别对应的转速为25.5、28、36r/min。
3.2 仿真结果分析
在运动仿真过程中,由于每根杆齿轴和杆齿装配关系相同,每个杆齿及杆齿轴在滑道的约束下运动轨迹和加速度均相同,为了提高仿真效率,现将机构简化至保留一根杆齿轴和轴上的一个杆齿,完成约束和驱动的添加后在UG中进行解算。通过UG中的追踪功能绘制出杆齿末端的运动轨迹,如图4所示。
(a) 杆齿相对运动轨迹

(b) 不同速比时杆齿末端加速度曲线
图4(a)为不同速比情况下杆齿末端从运动轨迹杆齿将要进入拾膜段开始的加速度随时间变化情况。拾膜阶段,自杆齿入土后,杆齿末端的曲率半径不变;杆齿升运地膜到卸膜阶段,杆齿末端轨迹的曲率逐渐减小,流畅过渡到卸膜阶段;卸膜时杆齿平移回收,杆齿回收长度相同,便于卸膜;其余阶段轨迹平滑。
如图4(b)所示:机具行进速度相对于杆齿轴转速的速比越小,杆齿末端的加速度相应就越大,并且,其加速度的峰值出现得也越早。速比为1.5、1.3和1.0时,加速度的最大值分别为3.21、5.84、8.60m/s2,速比值越小加速度曲线越陡峭,同样时间段加速度增幅越大。不同速比的杆齿末端加速度在拾膜段、脱膜段、升运段波动不大,在回复段由于加速度方向变化较大使得加速度急速下降。速比较小时,在拾膜段,杆齿末端的速度在较短时间内达到拾膜要求,并且,杆齿升运地膜的时间较短,有利于被捡拾的地膜不在运动过程中滑落。
4 拾膜卸膜机构试验
为了找到杆齿式残膜回收机具最佳匹配参数,验证拾膜、卸膜机构工作性能是否满足要求,采用台架试验对机构主要因素进行正交试验。
4.1 试验参数选择
通过对杆齿式捡拾机构的结构设计及运动分析,考虑到杆齿末端的运动姿态是机具行进速度和杆齿轴转速共同作用的结果,并且,杆齿伸入土壤一定深度是保证杆齿拾膜的必要条件,选择机具行进速度、机具行进速度与杆齿轴线速度之比和杆齿入土深度作为试验因素。
4.2 试验评价指标
杆齿式残膜回收机作业效果的主要评价指标是残膜回收率,影响残膜回收率的主要指标为拾膜机构的拾膜率和卸膜机构的卸膜率。
拾膜率的计算公式为
(12)
式中 S1—拾膜率;
m1—已捡拾的残膜质量;
m2—未捡拾的残膜质量。
卸膜率的计算公式
(13)
式中 S2—卸膜率;
m1—已捡拾的残膜质量;
ms—回收到集膜箱的残膜质量。
试验采用L9(34)正交试验表,通过对单因素试验的分析和试验台控制器的量程,初步确定各因素的取值范围:机具行进速度(土槽小车行进速度)(A)为0.6~1.2m/s,机具行进速度与杆齿轴线速度比为1~1.5,杆齿入土深度在20~80mm。试验发现:卸膜过程中杆齿被卸膜刮板连续刮捋两次,基本保证没有残膜漏卸,选取卸膜轮转速与杆齿轴转速定比为2∶1。选取的试验因素及水平如表2所示。
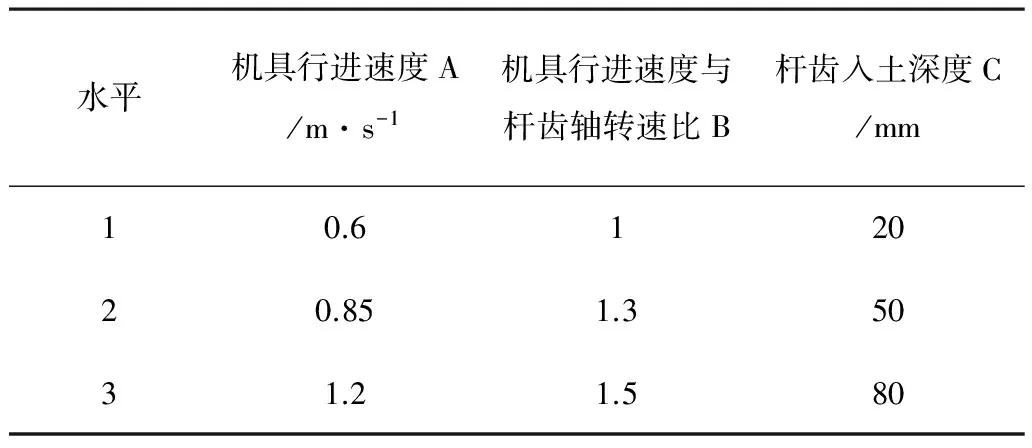
表2 试验因素与水平
4.3 正交试验结果
正交试验结果见表3所示。
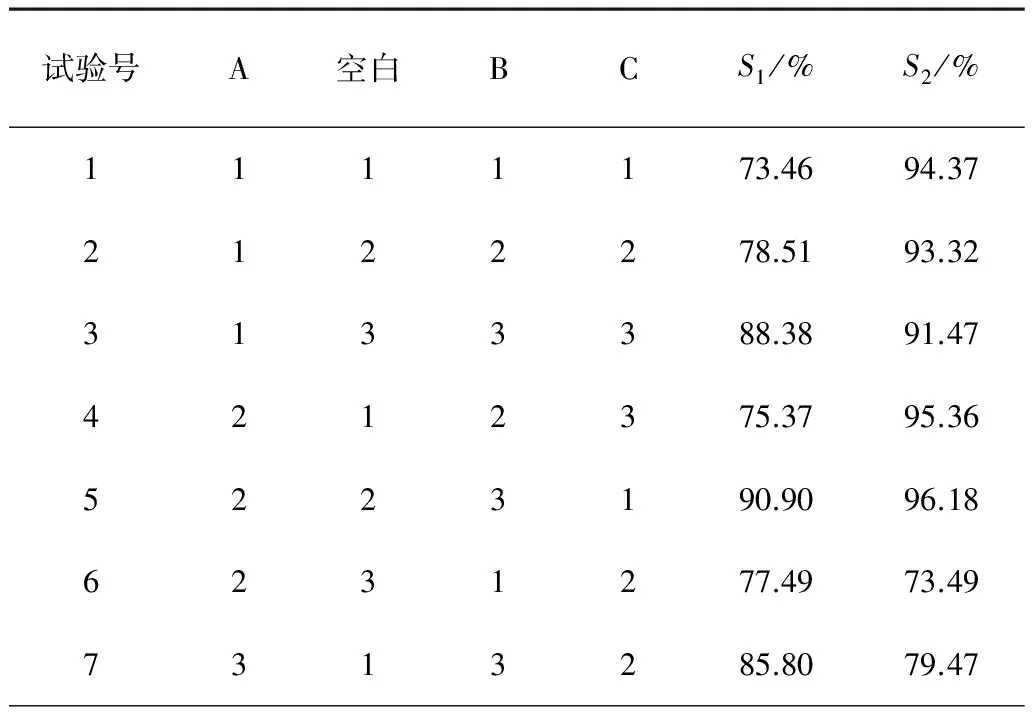
表3 正交试验方案与试验结果

续表3
4.4 试验结果分析
如表4所示:上述各因素影响杆齿式拾膜机构拾膜率的主次顺序为机具行进速度与杆齿轴线速度比n(B)、机具行进速度v(A)、杆齿入土深度L(C)。最优组合为机具行进速度0.85 m/s、杆齿轴与机具行进速比1.5、杆齿入土深度为50mm,此时机构拾膜率较高。由表4可知:19 表4 试验结果分析 1)对杆齿式拾膜、卸膜机构进行理论分析,通过理论分析得出凸轮滑道作用下的杆齿末端状态対拾膜、卸膜机构性能有关键影响。 2)运动仿真表明:拾膜杆齿的末端最大加速度为8.60m/s2,拾膜过程中残膜不易滑落,杆齿末端轨迹满足拾膜、卸膜要求,利于残地膜回收。 3)通过正交试验找到机具较优工作匹配参数,当机具行进速度与杆齿轴转速比为1.5、机具行进速度为0. 85m/s、杆齿的入土深度为50mm时,拾膜率和卸膜率均较优。 [1] 严昌荣,梅旭荣,何文清,等.农用地膜残留污染的现状与防治[J].农业工程学报,2006,22(11):269-272. [2] 谢建华,侯书林,付宇,等.残膜回收机杆齿式拾膜机构运动分析与试验[J].农业机械学报,2013,44(S1):95-99. [3] 侯书林,胡三媛,孔建铭,等.国内残膜回收机研究的现状[J].农业工程学报,2002,18(3):186-190. [4] 白圣男,张惠友,杨晓丽,等.杆齿式收膜机的杆齿预选轨迹方程的建立[J].东北农业大学学报,2007, 38(6):832-834. [5] 穆道欢,杨宛章.残膜回收机杆齿式捡拾机构的设计及试验研究[J].农机化研究2015,37(11):91-94. [6] 王吉奎,付威,王卫兵,等.SMS-1500型秸秆粉碎与残膜回收机的设计[J].农业工程学报,2011,27(7):168-172. [7] 谢建华,侯书林,张学军.基于预定轨迹的残膜脱卸机构的优化设计[J].农机化研究,2015,37(6):89-92. [8] 张学军. 残膜分离与输送装置的研究[D].长春:吉林大学,2007:10-18. [9] 赵海军,史建新.残膜回收工艺探讨[J]. 中国农机化,2004(6):68-71. [10] 薛文瑾,王春耀,朱振中,等.卷膜式棉花苗期残膜回收的 设计[J].农业机械学报,2005,36(3):148-149,147. [11] 陈发,史建新,赵海军,等.固定凸轮残膜捡拾机构的优化 设计[J].农业机械学报,2005,36(12):43-46. [12] 邰淑彩,孙韫玉,何娟娟,等.应用数理统计(2版)[M].武汉:武汉大学出版社,2005.Abstract ID:1003-188X(2017)05-0063-EA Motion Simulation and Orthogonal Experiment on Pole-teeth Plastic Film Residue Collector Xie Jianhua, Sun Chaowei, Yang Yelong,Cao Xiaoran Pole-teeth plastic film collector was designed in accordance with slide-way pole-teeth hay rake mechanism. The pose of pole-teeth was determined its collection ratio and unloading film performance when the machine is operating. To further investigate the pose variation of pole-teeth collection and determine the optimal working condition, the motion simulation and the Orthogonal experiment were carried out. Motion simulation was presented pole-teeth end trajectory in the motion of plastic film collector and pole-teeth end acceleration curve in different speed ratio. By using the soil-bin trolley experiment, the orthogonal experiment with influence factors of machine operating speed, speed ratio (the ratio of the speed of machine operating and spring-tooth axis speed) and the embedded depth of the pole-teeth for lifting film was carried out. The results was indicated that the variation of speed ratio have greater influence to machine performance compared with that of machine operating speed and the embedded depth of the pole-teeth. Moreover, the collection ratio of mechanism could reach the optimal level when the machine operating speed was 0.85m/s, the speed ratio was 1.5,and the embedded depth of the pole-teeth for lifting film was 50mm. plastic film residue collector; pick-up residual plastic film mechanism; unloading residual plastic film mechanism; orthogonal experiment 2016-04-05 国家自然科学基金项目(51465057) 谢建华(1975-),女,四川安岳人,副教授,博士,( E-mail)xjh199032@.163.com。 S223.5 A 1003-188X(2017)05-0063-05
5 结论

猜你喜欢
蜜蜂杂志(2021年10期)2021-12-06
蜜蜂杂志(2021年11期)2021-02-18
今日农业(2020年16期)2020-12-14
今日农业(2020年19期)2020-11-06
内燃机与配件(2020年3期)2020-09-10
农家书屋(2019年4期)2019-03-16
铁道通信信号(2018年11期)2019-01-19
今日农业(2019年4期)2019-01-04
今日农业(2019年5期)2019-01-03
汽车工程(2016年11期)2016-04-11
