
落地林果集果捡拾技术研究及进展
2017-12-15 06:47周远航李成松张慧明
农机化研究 2017年1期
周远航,坎 杂,李成松,张慧明,付 威,崔 健
(石河子大学 机械电气工程学院,新疆 石河子 832003)
落地林果集果捡拾技术研究及进展
周远航,坎 杂,李成松,张慧明,付 威,崔 健
(石河子大学 机械电气工程学院,新疆 石河子 832003)
林果收获是果园生产全过程中重要的环节之一,对促进林果产业发展、增加效益起着重要作用。近年来,随着劳动力成本提高和林果种植面积增加,部分科研院所对林果收获机械进行了相关研究。由于部分林果(干坚果)成熟后落在地面,因此对落地林果进行集果捡拾作业。目前,国内外针对落地林果收获技术进行了大量的研究工作,介绍了不同种类落地林果集果捡拾机械的组成、工作原理及特点,对其结构参数、集果捡拾方式、工作效率、集果捡拾效率和机械损伤等关键技术参数进行了综合分析。最后,针对我国林果种植模式,结合国外成熟的集果捡拾技术,提出一种适合我国落地林果机械化收获的新技术、新方法,为我国落地林果集果捡拾机械的研究提供技术参考。
林果;集果;捡拾;收获机械;损伤
0 引言
中国是世界各类林果的生产和消费大国,从1993年至今,中国各类林果栽植总面积和总产量一直稳居世界第一。因此,我国林果产业已经成为种植业中位列粮食、蔬菜之后的第三大产业[1]。近年来,我国林果种植面积迅猛增加,2013年我国各类林果种植面积突破1 300万hm2[2],林果产业的迅速发展促进了果园机械的市场需求[3]。
林果收获作业是林果生产全过程中最重要的环节,其季节性强、劳动密集,所用劳动力占整个生产过程所用劳动力的35%~45%[4-5]。由于劳动力成本增加,促使林果收获机械被应用到林果收获作业[6-7]。从20 世纪60 年代起,随着劳动力成本的日益上涨,国外林果收获机械越来越广泛地应用于林果采收过程中;我国从20 世纪70 年代就开始研究果品辅助采收装置,先后研制出气囊式采果器、手持振摇式采果器及切割型采果器。目前,林果收获方式主要有两种,树上果品一次性联合收获和树上果品摇落—集果捡拾的分段收获。由于同一果品成熟期不一致,果实成熟后会自然脱落,采用一次性收获作业时,需要借助化学催熟剂和脱落剂[8]。分段收获作业是采用集果机械将摇落在地面的果实聚集在果树行间或作业机械侧面,再通过捡拾机械进行捡拾作业。由于我国果园种植密度大,果园地表情况复杂多样,大型林果收获机和接果装置无法在果园灵活作业[9],所以分段收获比较适用于我国果园的收获作业。分段收获中的集果和捡拾作业质量,直接影响果实的品质,因此本文重点介绍分段作业方式中的集果及捡拾作业机械。
1 国内外发展现状
1.1 国外发展现状
20世纪60年代,国外已经开始对林果收获机械进行研究,目前已基本实现了林果收获的机械化。在分段收获作业机械方面,集果捡拾机械技术成熟,美国采用集果捡拾机械进行收获作业面积占总种植面积的70%以上[10]。Harold R.Summer和Scott L.Hedden设计的由拖拉机带动的全液压集果机械,利用旋转式集果器,将落地的柑橘聚集至果树行间,有利于捡拾作业。果园集果试验时,机器前进速度为0.12m/s,平均集果效率为185kg/min,最大集果效率为272kg/min,集果率为99%;集果作业后,平均果实堆积密度为22kg/m2。机械化收获的柑橘平均有4%被扎破,3%产生开裂。果园杂物较多时,机器容易产生堵塞现象,杂物中的树枝对柑橘的损伤影响较大[11-12]。试验发现:当螺旋叶片卷角为15°、俯仰角为30°时,机器运转效果好,除去机器转弯、停机和卸载果实的时间,整机的有效工作时间占其在果园总时间的75%[6,13]。1967年,美国农业部工作人员设计了一台柑橘收获机[14-15],集果装置采用双螺旋机构。螺旋集果器直径为860mm、长2 100mm,位于机器前进方向70°的位置,由直径25mm的橡胶齿和13个附着在与螺旋器外围焊接的扁平金属条组成;捡拾装置采用卧式滚筒毛刷将收集成条的柑橘扫至集果平台,再由传送装置输送至果实收集箱。在沙土果园进行试验时,集果率达95%,捡拾率达93%;试验过程中出现柑橘堵塞的情况,损伤率较高。
1972年,E.L.Jones设计了一台坚果收获机,通过拖拉机前方悬挂的横向仿形绞龙进行集果作业,横向旋转轴上的弹性钢齿进行捡拾作业,如图1所示。果园试验时拖拉机前进速度为0.5m/s,试验结果表明:该坚果收获机的集果率为97%,捡拾率为95%,损伤率为2%[15]。由于集果装置采用直径较大的仿形绞龙,仿形效果差,且无法在果树下方作业,整机的有效工作面积和适用范围小。
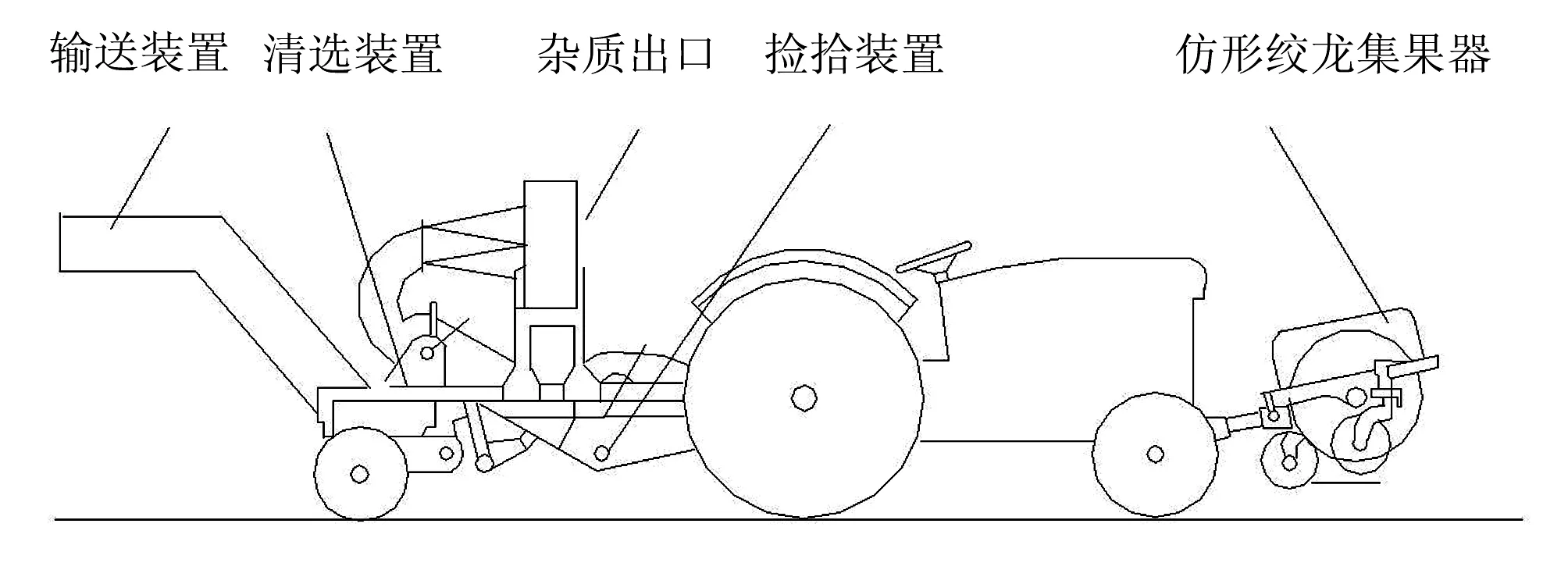
(a) 坚果收获机总体结构
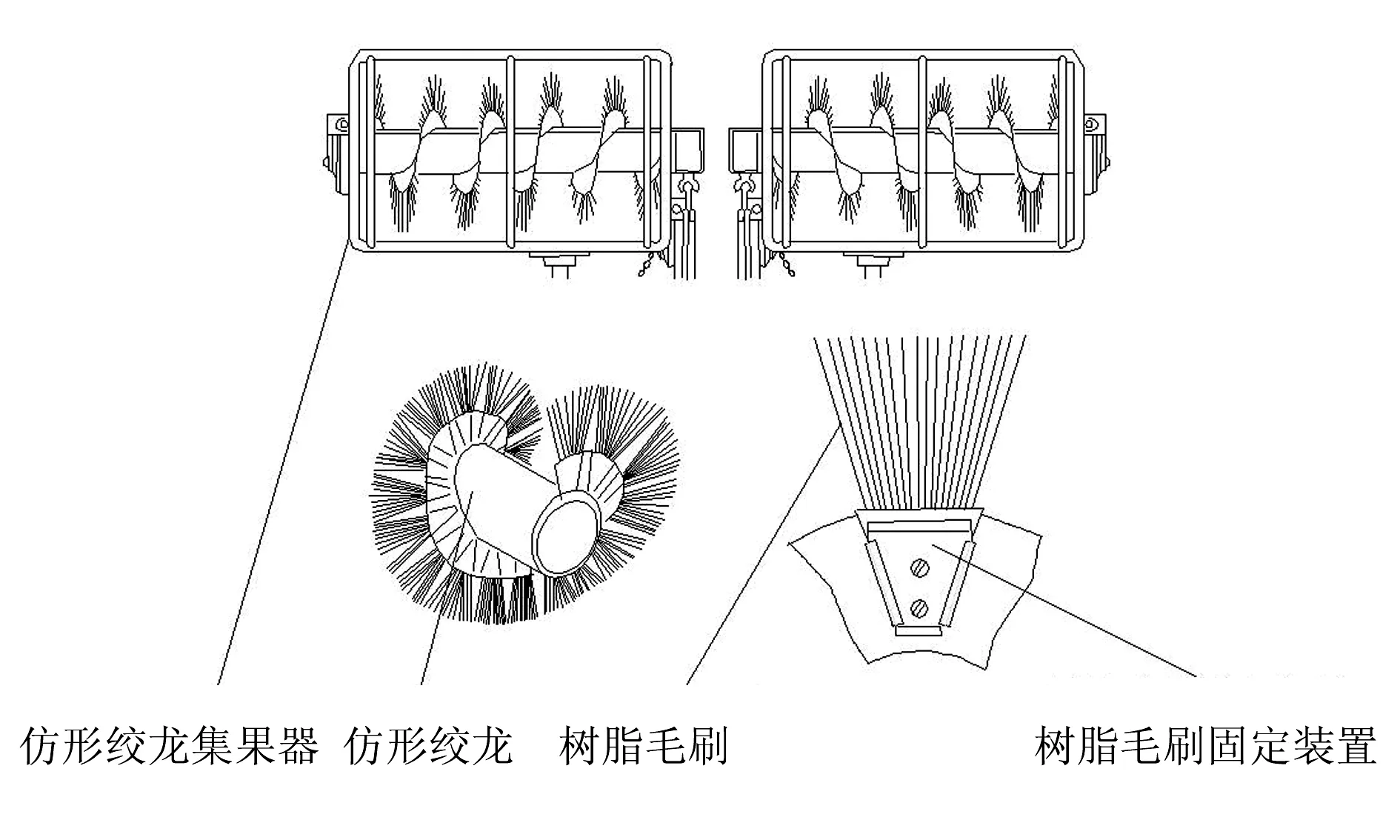
(b) 坚果收获机集果装置
Howard E. Flory于1973年发明了一种自走式林果收获机,将落地的果实收集成行。收获机采用前置的类似于扶禾器结构的滚筒毛刷集果器进行集果(见图2),其每排毛刷可以在20°的角度范围内进行手动调节,以适应不同表皮硬度的果实和不同土质的果园地表。整个集果器可以在机器前进方向通过液压油缸的伸缩进行角度调节,其角度调节范围为0°~28°,以适应落地林果量和行距不同的果园,收获机在果实堆积行的另一侧布置了风机出口,通过气流将树下果实和杂质吹至果树行中央。根据不同果实的比重、外形尺寸和果园地表情况,可调节出风口的风速[16]。

图2 林果收获机
1974年,D.B.Churchill和H.R.Sumner设计了从果树行间进行集果和捡拾的全液压林果收获机械[17-18],采用拖拉机悬挂和牵引及倾斜的旋转式集果器进行集果作业,侧面的滚筒毛刷将收集成条的果实扫至收集板上完成捡拾作业(见图3),整机宽4 200mm、长8 230mm。在果树株距为7 600mm,行间距为9 100mm、平均产量为204kg/株的果园进行试验时,机器前进速度为0.44m/s,平均集果效率为300kg/min,捡拾效率为372kg/min,集果率为93%,捡拾率为92%,损伤率为4%。在高产果园进行工作时,落地柑橘较多,损伤率上升。1980年,D.B.Churchill和S.L.Hedden改进了原有的机器,将单个旋转式集果器改为对称布置的两个旋转式集果器,V字形排列(见图4),整机展开之后长度为11 600mm,在株距为7 600mm,行距为13 000mm的果园进行试验时,前进速度为0.13m/s,集果效率为490kg/min,捡拾效率为512kg/min,集果率为92%,捡拾率为95%。由于增加了机器整体尺寸,果园地头转弯时,转弯半径增大,机器作业不灵活,效率提高不明显,且整机增加一个旋转式集果器后,结构复杂,机器的故障率增大[19]。

图3 单旋转式集果器收获机
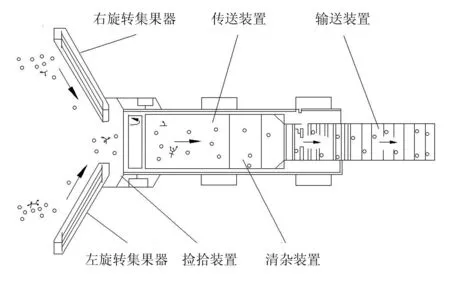
图4 双旋转式集果器收获机
1974年,W. Jack Croft Wichita发明了一种自走式山核桃收获机(见图5),采用钢板将落在地面的山核桃梳刷成统一的厚度,在采用错位对置的捡拾辊(见图6)(弹性钢齿和橡胶齿分列布置,既保证了捡拾辊齿刚性的要求,也减小了由于刚性碰撞而造成的果实损伤)将梳刷平整的山核桃进行捡拾,拾起的山核桃在惯性的作用下落入振动筛行清杂和输送,进入输送带和输送辊,最终进入集果箱[20]。整机结构紧凑,一次可完成山核桃的捡拾、除杂、简单分选和储运,减少劳动力的投入,降低了收获成本。
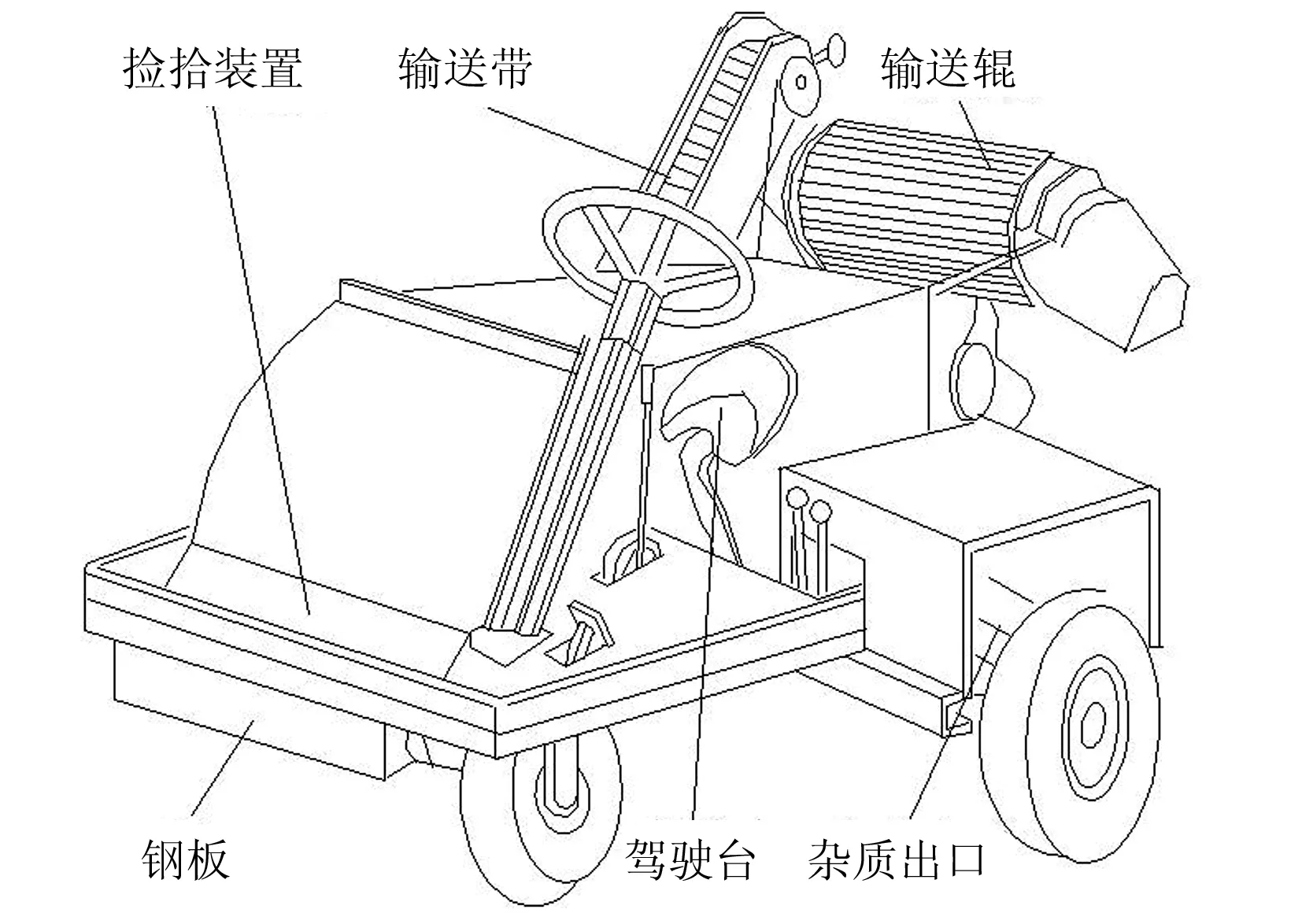
图5 自走式山核桃收获机

图6 自走式山核桃收获机关键工作部件及工作原理
澳大利亚医学管理人员协会会员公司设计制造的SEMEK自走式榛子收获机,通过机器前方安装的两个大型圆盘橡胶集果器进行集果(见图7);然后采用滚筒毛刷捡拾装置将榛子拾起,通过输送装置将榛子输送至栅格板上进行清杂,后被进入集果箱(见图8)。M.Fedrizzi等对自走式榛子收获机进行研究,当机器前进速度为0.42m/s、90%地面榛子(10%的杂质包含树枝、树叶和杂草等)时,机器工作效率为0.64hm2/h(1.25t/h),集果率为93%,捡拾率为94%,榛子的损伤率为1%。机器设计运输宽度为2 800mm,果园试验工作幅宽为4 500mm。由于集果圆盘直径较大,不适用于地面情况复杂的果园作业。
1977年,H.R.Sumner和D.B.Churchill针对旋转式集果器和圆盘毛刷集果器的工作效果进行了对比试验[21]。旋转式集果装置由1~3个旋转集果器组成,其与前进方向的夹角为64.7°,机器前进速度为0.57m/s;圆盘毛刷集果器选用长150mm,直径为9×10-4mm的聚丙烯材料,圆盘毛刷直径的重叠率为30%,圆盘毛刷与前进方向的夹角为44.7°,转速为100r/min。试验结果表明:旋转式集果器的长度和质量较大,不易控制,在平坦地面进行集果时,集果效率高,损伤率小。圆盘毛刷适用范围较广,在地面不平整的情况下集果率优于旋转式集果器;但其损伤率高,工作效率低,果实较多时,无法正常完成集果作业。

图7 自走式榛子收获机

图8 自走式榛子收获机清杂部分
1988年,Whitney等人设计的AMI林果收获机,在行间距为600mm的果园进行试验时,在工作速度为0.28m/s、地面散落果实密度为20~30个/m2、机器的工作效率为15~20t/h时,集果率为97%,捡拾率为95%,果实的损伤率为4%[13,22]。果园地面不平整时,该收获机的工作效率、集果率会降低,损伤率会升高,整机可靠性降低,以至于不能正常工作。
阿尔斯波(Oxbo)国际特种作物农机公司研制的大型柑橘收获机,采用多个旋转式集果器将树下和行间的柑橘收集在机器前方,通过捡拾装置将柑橘输送至螺旋输送器,然后输送至集果箱,如图9所示。试验结果表明:在丘陵地、平地和低洼地的收获效率分别为161、97、94kg/min,平均收获率分别为97%、91%和80%,收获速度为0.14hm2/h时,其损伤率分别为小于1%、8.7%和9.4%;在丘陵地和低洼地试验效果较好,最大收获率分别为181.9kg/min和193.4kg/min。刚性集果器在平地工作时,性能良好,地面低洼不平时,对柑橘的损伤严重,损伤率会增长5~7倍[23-24]。
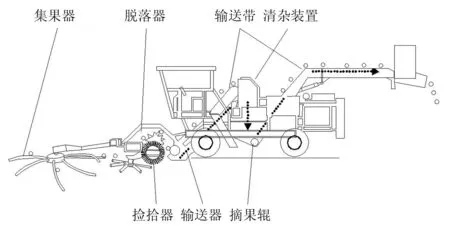
图9 大型柑橘收获机
阿尔斯波(Oxbo)国际特种作物农机公司对原有的收获机进行了改进,将原来刚性集果器表面包裹了一层橡胶,机器正前方两侧的刚性集果器也换为滚筒毛刷,有效地减小了果实损伤率;增加了一套图像分析系统,对霉病果实和杂质进行了剔除[25-26]。机器分别在丘陵地、平坦地和低洼地进行试验,试验结果显示,其收获效率分别为160、97、94kg/min,集果率达98%以上,捡拾率96%以上,在丘陵地试验时,损伤率为0.53%。
2005年,Galen K.Brown针对加工果汁的柑橘的收获作业,设计了一种收获机械。该收获机采用长度较大的旋转式集果器进行集果作业,采用卧式滚筒毛刷进行捡拾作业[27],其工作速度为0.8~0.44m/s,工作效率为3~5棵/min,整机工作幅宽为3 000mm。在层状树丛的果园进行试验时,集果率达到95%~99%,捡拾率达到95%~97%,损伤率为2%,收集起来的柑橘品质好。该机器在杂质较少和地表干燥的果园工作时,性能稳定,当杂质较多或雨天、雨后工作时,旋转式集果器容易出现故障,工作效果差。
1.2 国内发展现状
2007年,欧阳锋等人设计了第一代百香果收获试验样机,采用回转毛刷将百香果扫至机器前部中间位置后,输送链捡拾百香果送往后方集果箱中,整机长度为1 400mm,宽度为2 100mm。样机在长25 000mm、宽500mm、密度为4.4个/m2和9.9个/m2(百香果盛产期平均密度为2.9个/m2)、百香果平均质量为90g的果园进行试验时,结果显示:回转毛刷集果与链式输送的捡拾方式可成功地将百香果从地面收获,收获率达94%,并且百香果表面无明显损伤[28]。
为了更好地适应田间收获作业,欧阳锋等人2008年研制了百香果集果、捡拾二代试验样机,如图10所示。试验样机采用左右两侧的橡胶板旋转刷将两侧的百香果向中间收集,再采用中间的橡胶板旋转刷将百香果扫入倾斜捡果板后,被输送链条带往后方集果箱中;左右两侧的橡胶板旋转刷展开后,整机宽度为行距的一半,每行的集果作业需要往返两次。样机在行距为3600mm、株距为1300mm及地面具有少许杂草和石块的果园进行试验时,机器前进速度为0.36m/s,集果率在90%以上,捡拾率在76%以上,果品损伤率为11%[29];机器在0.36m/s的速度下进行工作时,收获效率为20hm2/h,人工收获效率为为1.2hm2/h,机器的收获效率大约是人工收获效率的16倍。

图10 第二代百香果收获机
欧阳锋等人于2008年研制了百香果集果捡拾三代试验样机,改进了第二代样机缺点,研制完成一台全液压百香果集果捡拾样机,具有集果捡拾与行走功能。在作业速度为0.3 m/s、回转毛刷转速为50 r/min时,其集果率在98%以上,捡拾率在97%以上,集果、捡拾成功率可达96%以上,百香果的破损率在0.94%以下[30]。
2013年,塔里木大学史高昆等人设计了一台气吸式红枣收获机,该机主要由吸管、风机、分选管道、三通管道、机架、集果箱及集杂袋等组成,如图11所示。机器工作时,利用风机产生高速气流,使吸管通道内产生负压,将地面的红枣和杂物等吸起;当红枣和杂物进入三通管道时,由于气流方向的改变,三通管道的出口处气压值为正,红枣和杂物被气流吹送至分选管道;进入分选管道后,气流管道直径变大,气流速度减小,密度较大的红枣落入收集框中,枣树叶子等比重较小的杂质被气流带至集杂袋中,完成红枣的捡拾和清杂工作[31]。机器在新疆建设生产兵团一师十团七连矮化密植红枣园进行田间试验时,单个红枣平均质量30g,枣树行距1 500mm,分别改变吸管口的风速得到相应的捡拾率、损伤率和含杂率等指标;当吸管口风速为23m/s时,各项指标较优,其平均收获效率为3.05kg/min,与同期人工收获相比,其收获效率是人工收获效率的5.2倍[32-33]。

图11 气吸式红枣收获机
新疆阿克苏市的阿布拉·艾拉发明的一种牵引式气吸红枣收获机(见图12),利用汽油发动机带动风机高速旋转,在吸枣口产生负高压真空,将落在地面的红枣和枝叶吸进管道中,在收集箱内实现红枣和杂质的分离;除杂后的红枣落入集果箱中,枝叶随气体流动进入风机,高速旋转的扇叶将杂质粉碎后随气流在出风口处吹出[34]。整机结构简单,操作方便,但其能耗高、噪音大,工作时具有一定的危险性。张一帆发明的一种便于分离杂物的红枣捡拾机,其工作原理和主要结构与阿布拉·艾拉发明的收获机基本一致,只是设计有沉淀室和倾斜安装的带有虑孔的下滑板,可实现红枣的两次除杂,降低了收获果实的含杂率[35]。
塔里木大学的胡灿等人设计了一种牵引清扫式落地红枣捡拾收获装置(见图13),前方采用V字形卧式布置的滚筒毛刷将落在地面的红枣收集成一行,通过捡拾铲的抖动和红枣的惯性将红枣与地面分离;然后采用风机产生负压气流将红枣吸起,后落入输送带,输送至分级器,将红枣按照几何尺寸进行分级,分级后的红枣落入不同的收集筐中[36]。
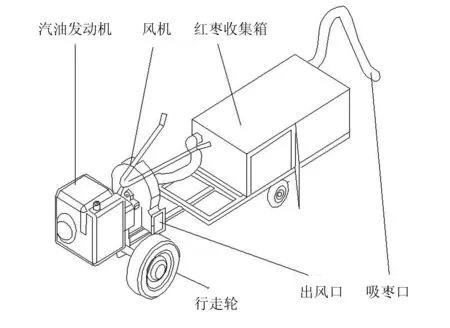
图12 牵引式气吸红枣收获机

图13 一种清扫式落地红枣捡拾收获装置
集果捡拾机械除单独作业以外,还被运用到大型自走式林果收获机上,用以将落地的林果进行集果或捡拾作业。中国农业机械化科学研究院杨学军等人研制的自走式全自动红枣收获机[37-38],在前行走轮前方安装圆盘毛刷集果机构,将轮子前方的红枣清扫至收获机两侧,防止收获机轮子对落地红枣造成碾压。圆盘毛刷和收获机之间采用四杆机构进行连接,其中四杆机构的上连杆采用长度可调的杆件,可实现对圆盘毛刷前后俯仰角度在一定范围的调节;通过液压油缸的伸缩实现圆盘毛刷上下位置的控制,圆盘毛刷采用液压马达驱动,转速可以随落地红枣的量和地表状况进行调节。果园试验显示,其防碾压的效果明显,如图14所示。
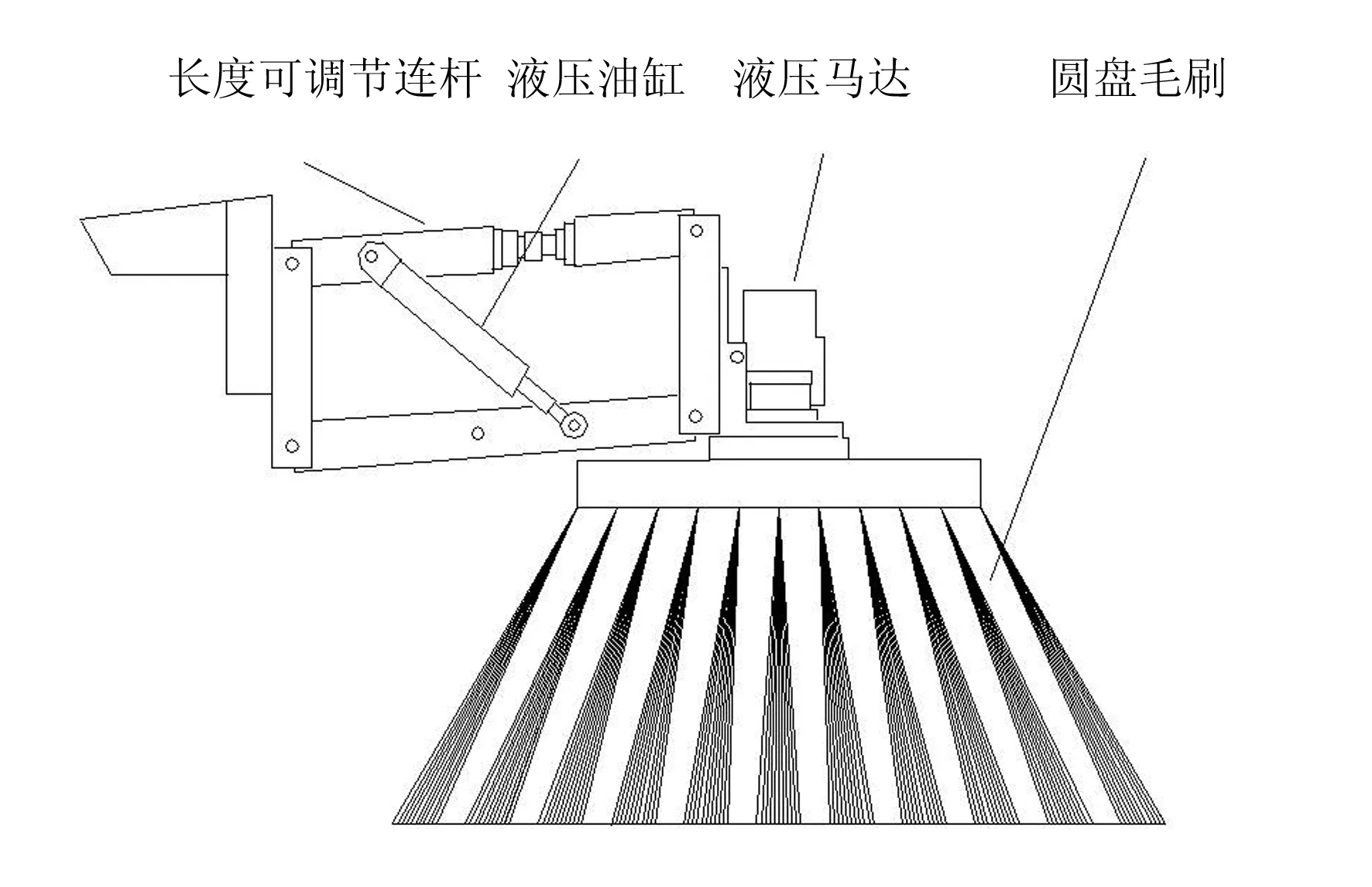
图14 自走式全自动红枣收获机集果机构
石河子大学机械电气工程学院与武汉威明德股份有限公司联合研制的4ZZ-2Y型红枣收获机[39-40],在前轮内侧安装转向相反的双向集果装置,采用安装在旋转轴上的树脂片将落在地面的红枣进行集条,然后利用入土的弯形钢齿进行捡拾作业;由于树脂片安装缺少自由度,弯形钢齿不具备仿形功能,作业效果并不理想,如图15所示。2015年,武汉威明德股份有限公司冯冰等人发明了一种具有果实捡拾机构的林果收获机[41-43],如图16所示。该捡拾机构通过圆盘毛刷将落在地面的果实收集成一行,采用抖动式拾果器利用振动和惯性原理将收集成行的果实拾起,落入抖动式拾果器后方;通过弹齿搂果器的旋转,将果实带到输送带上,完成果实的收获作业。

图15 4ZZ-2Y型红枣收获机集果捡拾机构

图16 4ZZ-2Y型红枣收获机集果捡拾装置
目前,国内针对林果集果捡拾机械的研究,欧阳锋等人研究较多,针对百香果的集果捡拾作业,技术成熟;其余林果集果捡拾技术研究基本还处于起步阶段,文献报道很少。集果捡拾机械除了单独进行收获作业以外,还可运用到大型的林果收获机上[44]。
2 总结及展望
1)我国果园分布广泛,地表状况复杂多样,集果捡拾机械应具有仿形功能,以适应我国不同区域地表复杂的现状,使其适用范围广。
2)针对表面硬度不同的林果、表面杂质不同的地表和多样的土质土壤,集果捡拾机械的转速应该具有可调性,以适用于不同品种的林果、不同含杂情况的地表和不同的土质土壤的果园的收获作业。
3)林果在集果运动过程产生滚动,容易出现碰撞损伤和摩擦损伤,应减小林果运动的路程,以降低林果的机械损伤率。
4)集果所采用的毛刷材料需要进行合理选取,以降低集果过程中林果的机械损伤率;毛刷硬度需要进行多种配置,以适应不同表皮硬度的林果的收获作业。
5)在种植密度较大的果园作业,机具应具备轻便灵活的特点,还应具有绕树过障功能,以提高工作效率和经济性能。
[1] 中国果品流通协会.我国水果产业发展状况及柑橘产销形势分析[J].果农之友, 2011,(1):3-5.
[2] 中华人民共和国国家统计局.果园面积[EB/OL].[2015-06-30].http://data.stats.gov.cn/easyquery.htm?cn=C01&zb=A0D0I&sj=2013.
[3] 洪添胜.第一大柑橘生产国亟需机械化来帮忙[EB/OL].2015-11-19.http://www.nongjx.com/news/Detail/52679.html.
[4] Sanders K F. Orange harvesting systems review[J].Biosystems Engineering,2005,90(2):115-125.
[5] Fernando alferez1,Shila singh,L Umbach,et al.Citrus abscission and Arabidopsis plant decline in response to 5-chloro-3-methyl-4-nitro-1H-pyrazole are mediated by lipid signalling[J].Plant, Cell and Environment,2005,28(11):1436-1449.
[6] 汤智辉,贾首星,沈从举,等.新疆兵团林果业机械化现状与发展[J]. 农机化研究,2008(11):5-8.
[7] 陈学庚,赵岩.新疆兵团农业机械化现状与发展趋势[J].华东交通大学学报,2015(2):1-7.
[8] 王长勤,许林云,周宏平,等.偏心式林果振动采收机的研制与试验[J].农业工程学报,2012,28(16):10-16.
[9] 阿丽娅.热依木.新疆特色林果业发展研究[D].乌鲁木齐:新疆师范大学,2012.
[10] 薛烨,周健,李立君,等.振动式林果采摘机采摘臂动力学仿真分析[J].农机化研究,2014,36(5):35-38.
[11] 孟祥金,沈从举,汤智辉,等.果园作业机械的现状与发展[J].农机化研究,2012,34(1):238-241.
[12] Dale E. Marshall;Scott L. Hedden. Design and Performance of an Experimental Citrus Fruit Pick-Up Machine[J].Transactions of the ASABE, 1970,13 (3): 406-408.
[13] D B Churchill, H R Sumner,S L Hedden. Development of equipment to windrow citrus fruit[J]. Lake Alfred,AREC,1967,28(11):1-8.
[14] Scott.L.hedden, H.R.Sumner, D.B.Churchill. Wheaton.Collecting and handling mechanically harvested oranges in south florida [J].Proc.Fla.State Hort,1979(5):59-61.
[15] Howard E. Flory, Minneapolis. Harvesting sweeper:Calif:US3728850A[P].1997-04-24.
[16] D B Churchill,H R Sumner.A new system for raking and picking up oranges[J].Transactions of the ASABE,1977,20 (4): 617-620.
[17] Sumner H R,Churchill D B.Effects of three limb shaker mechanisms on removal of oranges[J].Transactions of the ASAE,1978,21(4):661-664.
[18] D B Churchill, S L Hedden. A double-sided rake-pickup machine for citrus[J].Transactions of the ASABE,1983,20(4):1034-1036.
[19] W Jack Croft Wichita. Pecan harvesting machine:United:US3597905A[P].1974-02-22.05
[20] H R Sumner, D B Churchill. Collecting and handling mechanically removed citrus fruit[J].Proc.Int.Soc.Citriculture,1977(2):413-418.
[21] Whitney J D,Patterson J M.Development of citrus removal device using oscillating forced air[J].Transactions of the ASAE,1972,15(5): 849-855.
[22] G C Bora, R Ehsani. Evaluation of a self-propelled citrus fruit pick‐up machine[J]. Applied Engineering in Agriculture, 2009, 25(6): 863-868.
[23] Oxbo International Corp.,Minneapolis. Article pickup apparatus:Byron:US20070137162A1[P].2007-06-21.
[24] Pacheco A,Rehkugler G E.Design and development of a spring activated impact shaker for apple harvesting[J].Transactions of the ASAE,1980,23(4):826-830.
[25] Peterson D L,Whiting M D,Wolford S D.Fresh-market quality tree fruit harvester,Part I:Sweet cherry[J].Applied Engineering in Agriculture,2003,19(5):539-543.
[26] Galen K.Brown.New mechanical harvesters for the florida citrus juice in dustry[J].Horl Technology,2005,15(1):70-71.
[27] 欧阳锋,邱奕志,吴刚智,等.百香果捡拾机之研制[C]//中华农业机械学会.2007年生物机电工程研讨论论文集,中华农业机械学会:台北2007.
[28] Feng Ou-Yang, Pei-Chia Hsieh, Yi-Chich Chiu. The Development of a Harvesting Machine for Passion Fruits[J].ISMAB,2008(5):27-29.
[29] Hsieh P C, Ou-Yang F, Wu G J Cherng, et al.Mechanical performance evaluation of a passion fruit harvester using impact recording device[J].ISMAB,2009(5):7-12.
[30] 史高昆.气吸式红枣收获机设计与试验研究[D]. 塔里木:塔里木大学,2014.
[31] 史高昆,马少辉.气吸式红枣收获机的设计与试验[J].新疆农机化,2014(2):25-26+53.
[32] 史高昆,马少辉.气吸式红枣捡拾机设计与试验[J].农业工程,2014(3):109-112.
[33] 阿布拉·艾拉.一种牵引式气吸红枣收获机:中国,CN204466270U[P].2015-07-15.
[34] 张一帆. 一种便于红枣与杂物分离的拾枣机:中国,CN204259426U[P].2015-04-15.
[35] 胡灿,鲁兵,王旭峰,等.一种清扫式落地红枣捡拾收获装置:中国,CN104782327A[P].2015-07-22.
[36] 尹素珍,杨学军,王俊,等.自走式干果收获机:中国,CN202406543U[P].2012-09-05.
[37] 杨学军,尹素珍,张铁,等.一种自走式干果收获机:中国,CN201789778U[P].2011-04-13.
[38] 付威,坎杂,孙雨,等.一种林果收获装置:中国,CN102523838A[P].2012-07-04.
[39] 付威,何荣,曲金丽,等.自走式矮化密植红枣收获机的设计[J].农机化研究,2014,36(4):106-109.
[40] 冯冰,陈霁,柯望来,等.一种自走式全液压红枣收获机:中国,CN104737713A[P].2015-07-01.
[41] 冯冰,陈霁,柯望来,等.一种果实捡拾机构及具有该机构的红枣收获机:中国,CN204443159U[P].2015-07-08.
[42] 冯冰,冯晓,李全红,等.一种果实捡拾装置及捡拾方法:中国,CN103814695A[P].2014-05-28.
[43] 汤智辉,孟祥金,沈从举,等.机械振动式林果采收机的设计与试验研究[J].农机化研究,2010,32(8):65-69.
[44] 王长勤,许林云,周宏平,等.基于PLC和MCGS的偏心式林果振动采收机控制系统设计[J].农机化研究,2013,35(3):79-83.
The Research and Development of The Falling Tree Fruits and Nuts Collect and Pick-up Technology
Zhou Yuanhang, Kan Za, Li Chengsong, Zhang Huiming, Fu Wei, Cui Jian
(College of Mechanical and Electrical Engineering,Shihezi University,Shihezi 832003,China)
Mechanized harvesting is one of the most important taches in the full mechanization of fruit harvest, which plays an important role in promoting the development of forestry fruit industry and increasing economic efficiency. In recent years, with labor cost raising and the fruit cultivation area increasing, the fruit harvesting machinery technologies were intensively in part of academy. some mature fruit (dry nuts) fell on the ground,so to collect and pick the land fruit. At present, a great deal of research work has been done on collecting land fruit technology at home and abroad. Firstly, this paper briefly introduces the varieties of landing fruit set mechanical composition, working principle and feature. Then , The structure parameters, setting fruit collecting way, working efficiency, set fruit collecting efficiency and key technical parameters of mechanical damage were analyzed. Fruit planting patterns in China, combined with foreign mature fruit collecting technology. Finally, we put forward a new technology and method that it is suitable for landing fruit harvest mechanization in our country. The study provides for technology suggestion about collecting landing fruit technology in China.
forestry fruit; the fruit collecting; pick-up; harvest machinery; damage
2015-12-22
国家自然科学基金地区项目(E050601)
周远航(1991-),男,河南临颍人,硕士研究生,(E-mail)9807909942qq.com。
付 威(1977-),男(满),黑龙江五常人,副教授,博士,硕士生导师,(E-mail)fuwei001@126.com。
S225.93
A
1003-188X(2017)01-0256-08
猜你喜欢
中国农村科技(2021年12期)2021-12-28
———2020 款中农博远玉米收获机值得期待
河北农机(2020年1期)2020-01-11
河北果树(2020年4期)2020-01-09
河北农机(2020年2期)2020-01-08
智慧少年·故事叮当(2019年11期)2019-12-09
智慧少年·故事叮当(2019年7期)2019-08-09
智慧少年·故事叮当(2019年5期)2019-06-11
海峡姐妹(2018年7期)2018-07-27
电子制作(2017年22期)2017-02-02
浙江大学学报(工学版)(2016年9期)2016-06-05
