
混合动力船舶模式切换过程力矩协调控制
2017-12-15 05:51朱剑昀
中国机械工程 2017年23期
朱剑昀 陈 俐 彭 程
1.上海交通大学海洋工程国家重点实验室,上海,2002402.高新船舶与深海开发装备协同创新中心,上海,200240
混合动力船舶模式切换过程力矩协调控制
朱剑昀1,2陈 俐1,2彭 程1,2
1.上海交通大学海洋工程国家重点实验室,上海,2002402.高新船舶与深海开发装备协同创新中心,上海,200240
针对混合动力船舶的模式切换过程中可能出现的扭转波动,传动轴剧烈冲击和离合器过度磨损问题,提出基于模型参考控制(MRC)的力矩协调控制策略。首先建立动力传动系统动力学模型,基于此推导出电机单独推进模式的动力学模型,并作为参考模型;然后设计MRC力矩协调控制策略。仿真结果表明,与传统的模式切换方式相比,MRC控制可改善动力中断和轴系剧烈冲击,而且显著减小离合器滑摩功。敏感性分析给出了外部干扰和执行机构噪声对控制品质的影响。
混合动力船舶;模式切换;过驱动系统;模型参考控制
0 引言
面向绿色航运发展与渐趋严格的船舶节能减排法规要求,油电混合动力船舶正日益受到关注。它通过传动装置耦合柴油机与电机,来实现柴油机单独推进、电机单独推进或双机并行推进等模式,可适应复杂多变工况,避免柴油机低效工作,且在排放限制区域发挥电机零排放的优势。混合动力推进技术在多功能工程船、近海补给船、游轮、近海钻井平台以及军事舰船等领域具有广泛的应用前景[1-2]。
一般而言,当船舶低速行驶时,采用电机推进模式;当船舶中高速行驶时,采用柴油机推进模式;当船舶加速、遇风浪或在冰区行驶时,则采用双机并行推进模式。由此,模式切换操作是适应工况变化所必须的。切换过程中涉及传动控制元件(离合器)力矩导入以及与柴油机力矩、电机力矩协调等问题,若控制不当,将会造成传动系动力输出中断、冲击剧烈使得主轴断裂以及离合器热负荷过大而导致损坏等问题[3-4]。魏伟等[5]研究了串联式混合动力船舶能源管理的模式切换策略;高迪驹等[6]研究了混合动力船舶能量管理并提到模式切换策略,但未对模式切换过程的动态性能进行分析。
混合动力船舶模式切换过程有3个控制输入量(柴油机力矩、电机力矩和传动控制元件引入的力矩)和2个输出量(传动控制元件两端转速),是一个过驱动控制系统。这个特性与船舶多机并车过程相似。按照传动控制元件的不同,常用的并车方法有:①采用液力耦合器(耦合器的介质流体黏性大,可缓冲冲击,但泵轮与涡轮之间存在转速差,从而导致能量损失较大[7]);②采用同步自换挡(synchro-self-shifting,SSS)离合器(结构复杂,成本昂贵,操作简单,但易引起冲击[8-9]);③采用摩擦式离合器(结构简单,成本低,广泛应用于传扭需求不高的系统[10]),但是摩擦非线性增加了切换过程的复杂性。传统的简单液压控制具有冲击大的缺陷,为了减小冲击,使离合器接合柔和且滑摩功小,工程上提出了包括逐步升压控制、二次升压控制、逐步升压及可微速调压控制以及最大接合线速度控制等改进方法[11],但对这些方法的适用性、控制品质以及控制参数标定方法等,还缺乏系统分析。
模型参考控制(model reference control,MRC)以理想模型的工作状态为参考进行控制[12],且广泛应用于工程领域。CHOW等[13]用MRC方法对亚微米精密直线运动系统中的电机位置进行了精确跟踪。FANG等[14]利用MRC方法来消除车辆加速过程中的传动系统振动。WEN等[15]则将MRC方法应用在汽车电子控制器(electronic control unit,ECU)上,有效提高了换挡平顺性。此外,CHEN等[16]利用MRC方法控制混合动力车辆模式的切换,显著减小了车辆冲击度和离合器滑摩功。本文针对一种采用湿式摩擦离合器的混合动力船舶的模式切换过程,提出一种基于MRC方法的力矩协调控制策略。
首先建立动力传动系统动力学模型,基于此推导电机单独推进模式的动力学模型,作为参考模型。然后基于MRC方法设计力矩协调控制策略,在稳定性框架下设计过驱动系统的参数选择方法,并在MATLAB/Simulink平台进行仿真验证控制策略的有效性。最后通过敏感性分析给出了外部干扰和执行机构噪声对控制品质的影响。
1 动力学建模
1.1 系统描述
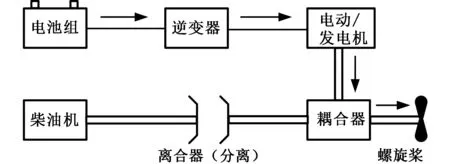
一种典型的混合动力推进系统架构及其工作模式的能量流如图1所示[17]。当船舶低速行驶时,离合器分离,处于电机推进模式(图1a),电机带动螺旋桨旋转,电机电力来源于电池。当船舶加速或遇到风浪等需要大推进力矩的工况时,离合器接合,引入柴油机推进,处于混合推进模式(图1b)。船舶中高速行驶时,离合器仍然接合,电机不输出力矩,处于柴油机推进模式(图1c)。事实上,从电机推进模式切换到柴油机推进模式,也需要经过混合推进模式。为不失一般性,本文针对从电机推进模式切换到混合推进模式的动力学过程进行了推导。
1.2 动力学建模
(a)电机推进模式

(b)混合推进模式

(c)柴油机推进模式

图1 混合动力推进工作模式Fig.1 Hybrid propulsion operating mode

(a)完整模型

(b)简化模型图2 混合动力船舶传动系统动力学模型Fig.2 Dynamic model for powertrain of hybrid ship
动力传动系统动力学模型包括五个关键部件,即柴油机、电动/发电机、离合器、耦合器和螺旋桨。为了凸显模式切换引起的冲击,模型忽略了弹性元件。在本文研究的模式切换过程中,电动/发电机在电动模式工作,故称该模块为电机。基于集中质量假设,图2所示为混合动力系统的动力学模型。由图2可以看出,TD、TM/G、Tpro、Tf和Tc分别为柴油机输出力矩、电机输出力矩、螺旋桨负载力矩、柴油机阻力矩和离合器传递力矩;JD、JM/G、Jpro、Jc_A、Jc_B、Jg1和Jg2分别为柴油机、电机、螺旋桨、离合器A轴、离合器B轴、耦合器齿轮组1和齿轮组2的转动惯量;ω1、ω2、ωM/G和ωpro分别为轴A角速度(即柴油机动力输出轴角速度)、轴B角速度、电机角速度和螺旋桨角速度;i1和i2分别为耦合器齿轮组1、齿轮组2的传动比。
从运动自由度的角度,由于电机角速度ωM/G、螺旋桨角速度ωpro与轴B角速度ω2之间的速比固定,即三者只有一个运动自由度,因此动力学模型可以简化为图2b,将电机、螺旋桨等部件惯量等效到轴B进行计算。
简化后的混合动力船舶模式切换过程的动力学方程为

(1)
(2)

(3)

J1=JD+Jc_A

计算可得螺旋桨负载力矩[18]
Tpro=KQρn2D5
(4)

式中,KQ为螺旋桨扭矩系数;ρ为水的密度;D为螺旋桨直径;n为螺旋桨转速。
1.3 离合器模型
离合器有三种工作状态,分别是 “断开”、“滑摩”和“锁合”。通过函数符号sign(·)建立库仑摩擦模型,其模型的表达式如下:
(1)当离合器处于“断开”状态时,有
Tc(t)=0
(5)
(2)当离合器处于“滑摩”状态时,ω1≠ω2,离合器力矩Tc的大小由执行机构给出,方向由离合器两端转速差决定。
Tc(t)=|Tc(t)|sign(ω1(t)-ω2(t))
(6)
(3)当离合器处于“锁合”状态时,ω1=ω2,离合器力矩Tc由静摩擦力产生。

(7)
1.4 参考模型
以电机推进模式的动力学模型为参考模型,电机输出力矩为船舶在符合航行需求的推进力矩TM/G_cmd,离合器断开时,其参考模型见图3。
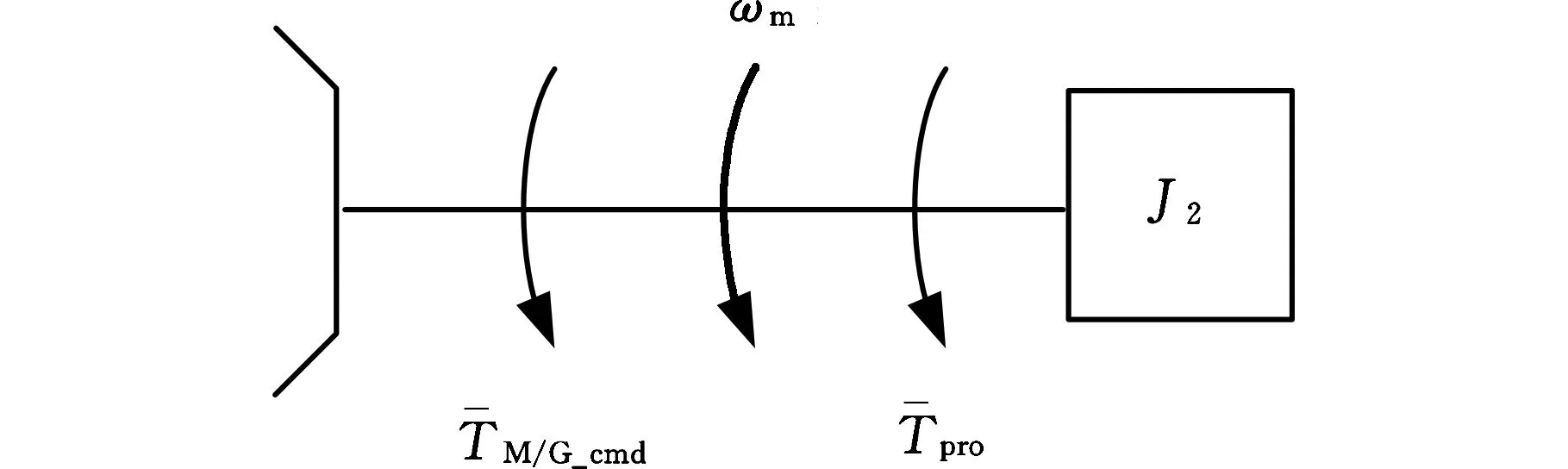
图3 参考模型Fig.3 Reference model
可得到其动力学方程如下:
(8)
(9)
式中,ωm(t)为参考模型中轴B角速度。
2 模型参考控制器设计
定义状态变量xp1(t)、xp2(t),控制输入u1(t)、u2(t)、u3(t),系统输出yp1(t)、yp2(t),以及扰动变量d1(t)、d2(t),其表达式分别如下:
(10)
(11)
(12)
(13)
其中,d1(t)、d2(t)采用估计值,Tf(t)取常数。
于是,动力学方程式(1)、式(2)可写为

(14)
(15)
定义参考模型的状态变量xm(t)、控制输入um(t)、系统输出ym(t)分别如下:
于是,参考模型的动力学方程式(8)可写为
(16)
综上,被控对象输出yp1(t)、yp2(t)和参考模型输出ym(t)之间的误差向量e(t)可表示为
e(t)=[e1(t)e2(t)]T=
[yp1(t)-ym(t)yp2(t)-ym(t)]T
(17)

(18)
反馈增益矩阵K与反馈算法如下:
(19)

图4 MRC控制框图Fig.4 MRC Control Diagram
u1(t)=r1(t)+k11e1(t)+k12e2(t)
(20)
u2(t)=r2(t)+k21e1(t)+k22e2(t)
(21)
u3(t)=r3(t)+k31e1(t)+k32e2(t)
(22)
2.1 误差方程及稳定性条件
由于该系统为过驱动系统,所以理论上有无数种控制方案。但实际上为了使系统稳定运行,控制参数需要符合各种约束条件。首先考虑系统稳定性条件,将式(17)改写为
(23)
将式(14)~式(16)和式(20)~式(22)代入式(23)可得

(24)
由Lyapunov稳定性理论第二判据可知,系统渐近稳定的充要条件是矩阵A的特征值均有负实部[19],因此反馈增益矩阵K应满足如下条件:
k11-k31+k21-k32<0
(25)
(26)
2.2 参数选择
本文中的MRC控制系统有3个输入(u1(t)、u2(t)、u3(t))(分别为柴油机力矩、电机力矩和离合器传递力矩),2个输出(yp1(t)、yp2(t)),是过驱动系统,且有无穷多解。考虑算法简便性和动静摩擦状态切换的连续性,本文提出了控制器参数的选择方法。
2.2.1输入量组合
由于在模式切换过程中电机仍然为船舶提供主要动力,所以电机力矩u2(t)不为零,故排除(u1(t),u3(t))组合。对于(u1(t),u2(t))组合而言,没有摩擦损失,但柴油机在低效区工作。对于(u2(t),u3(t))组合而言,虽避免了柴油机在低效区工作,但是存在摩擦损失。综合考虑,当A、B轴转速差较大时,选择(u1(t),u2(t))作为初始输入组合;当A、B轴转速差小于阈值ε时,引入输入u3(t)。其具体算法如下:
if |ω1(t)-ω2(t)|>εthen
else
end
2.2.2前馈设计
为了使得系统控制量连续,离合器滑摩结束时刻与锁合开始时刻的u3(t)必须相同,即按照式(21)计算的u3(t)须与按照式(7)计算的离合器传递力矩相等。联立式(7)与式(22),并将式(11)代入得
(27)
将式(20)、式(21)代入得
(28)
可见,当下列条件满足时,式(28)成立
(29)
(30)
对于式(29),若式(24)中的B=0,则误差e(t)的动态响应不受影响,据此推导下列等式成立

(31)
r2(t)=r(t)-r3(t)
(32)
进一步推导可得,式(31)、式(32)满足式(29)。
此外,由于在离合器滑摩结束或锁合开始时,A、B轴转速同步,即e(t)=0成立,因此式(30)自然成立。综上,前馈控制式(31)、式(32)可使系统在离合器滑摩与锁合切换时系统控制量连续,从而可使系统状态连续。
2.2.3反馈设计
反馈环节有6个反馈参数和2个稳定性条件式(25)、式(26),因而还有4个独立变量。由于u1(t)并不影响e2(t),即e2(t)相对u1(t)独立,因此可以只通过e1(t)的反馈来控制u1(t)。同理,u2(t)也不受e1(t)的影响。因此,参数k12和k21可设为零,这样减少2个独立变量。则稳定性方程式(25)、式(26)可以简化为
C1=k11-(k31+k32)<0
C2=k22(k31-k11)-k11k32<0
在模式切换过程中,u3(t)从零变为非零,这可视为对状态变量xp2(t) 的扰动,将式(21)、式(22)代入式(15)得

(33)
由于k21=0 ,以及根据式(32),式(33)可将上式改写为
(34)
MRC控制的目标为e(t)=0,即xp2=xm。联立式(16)、式(18)和式(34)可得
k22e2(t)+k31e1(t)+k32e2(t)=0

(35)
至此,对应两个稳定性条件式(31)和式(32),独立变量只有k11、k31和k32三个。
3 结果与讨论
本研究在MATLAB/Simulink平台上建立船舶动力学模型,同时根据上述推导建立参考模型为基础的MRC力矩协调控制策略,并先将使用MRC控制的模式切换过程与传统的逐步升压控制方法相比较。仿真结果表明,与传统的模式切换方式相比,MRC控制可避免动力中断和轴系剧烈冲击,而且显著减小离合器滑摩功。敏感性分析给出了阈值ε、外部干扰以及执行机构噪声对MRC控制品质的影响。
本文所研究的混合动力船舶排水量为160 t,设计航速为6.17 m/s,主机额定功率为280 kW,额定转速为167.5 rad/s。仿真中用到的参数如表1所示。此外,柴油机阻力矩Tf为50 N·m。因受执行机构响应能力的限制,柴油机力矩变化率为-100~30 N·m/s,离合器滑摩过程中力矩变化率为-200~100 N·m/s。由于电动机快速响应的特性,故未设置力矩变化率限制。

表1 仿真参数Tab.1 Simulation parameters
3.1 MRC控制品质仿真
在仿真过程中设置当B轴角速度达到140 rad/s时,则开始进行由电机推进模式到混合推进模式的切换。MRC的控制参数见表2。

表2 控制参数Tab.2 Control parameters
传统的逐步升压控制方法在B轴角速度达到140 rad/s时,离合器即进入“滑摩阶段”,切换过程的数学表达式如下:

MRC控制与传统操作的模式切换过程的比较如图5所示。其中,图5a为需求的推进力矩,图5b~图5d为三个控制输入量历程,图5e为离合器两端(即轴A与轴B)同步历程,图5f~图5h为切换过程评价指标,即轴A /轴B角加速度、轴A/轴B冲击度以及离合器滑摩功。

(a)需求推进力TM/G_cmd (b)电机力矩TM/G

(c)柴油机力矩TD (d)离合器力矩TC

(e)角速度ω1,ω2 (f)角加速度

(g)冲击度滑摩功ED图5 模式切换过程比较Fig.5 Comparison of HEV mode transition
轴B的角加速度是对传动系统力矩中断的量化描述。从图5f中可以看出,MRC控制的轴B角加速度平稳,反映出传递到B轴的动力没有中断也没有突变,而传统操作方式下,角速度最高可达23.81 rad/s2,且变化率较大。这是由于MRC在轴A与轴B转速差低至30 rad/s时才引入离合器接合,一方面滑摩力矩小,如图5d所示;另一方面电机力矩可较轻松抵消滑摩力矩对B轴带来负力矩的影响,如图5b所示。在传统操作方式下,离合器力矩增加得快,而电机力矩未随之调整,因而滑摩过程的负力矩效应明显;而离合器锁合之后,又由于柴油机力矩增加过快,故正向加速度较大。
轴A和轴B的冲击度分别是为角加速度的导数,是轴系受冲击大小的量化描述。传统操作方式在离合器滑摩结束迁移至锁合状态时对A轴和B轴都产生较大冲击度,而MRC控制的切换过程无明显冲击,如图5g所示。这是由于离合器从滑摩状态迁移至锁合状态时,摩擦形式从动摩擦变化为静摩擦,会导致摩擦力矩突变。MRC控制以轴A、轴B角速度跟踪参考模型输出角速度为目标,而参考模型在参考输入下产生的角速度二阶可导,通过3个控制输入量来实现预期性能,使离合器传递力矩平滑迁移,从而避免剧烈冲击。
图5h所示为滑摩功曲线,滑摩功是评价切换过程能量损失以及离合器使用寿命的一种量化指标,其计算方法如下:

(36)
传统操作方式的滑摩功为3.88 kJ,而MRC控制的滑摩功仅为133.81 J。从式(36)可知,滑摩功与3个因素有关:滑摩时间、角速度差和离合器力矩。虽然MRC的滑摩时间较长,为10.95 s,而传统操作方式的滑摩时间较短,为4.14 s,但MRC控制的角速度差和离合器力矩均远小于传统方式,如图5d和图5e所示,因此,MRC显著减小了滑摩功。
3.2 阈值ε对控制品质的影响
阈值ε是离合器参与切换时轴A与轴B的角速度差,ε决定了离合器参与切换的时刻。当ε取值30 rad/s、40 rad/s和50 rad/s时,切换过程的4个性能评价指标如图6所示。由图6a~图6c可以看出,ε取值对轴B角加速度(图6a)、轴A冲击度的最大值(图6b)和轴B冲击度(图6c)几乎没有影响(轴A冲击度来源于柴油机力矩的增长速率限制)。由图6d可以看出,ε取值越小,则滑摩功明显减小,3个取值产生的滑摩功分别为133.81 J、230.81 J、288.43 J。由此,在离合器参与切换之前通过柴油机控制使得轴A与轴B趋近(即达到较小的ε值)同步,有助于减小滑摩功。
3.3 外部干扰对控制品质的影响

(a)轴B角加速度
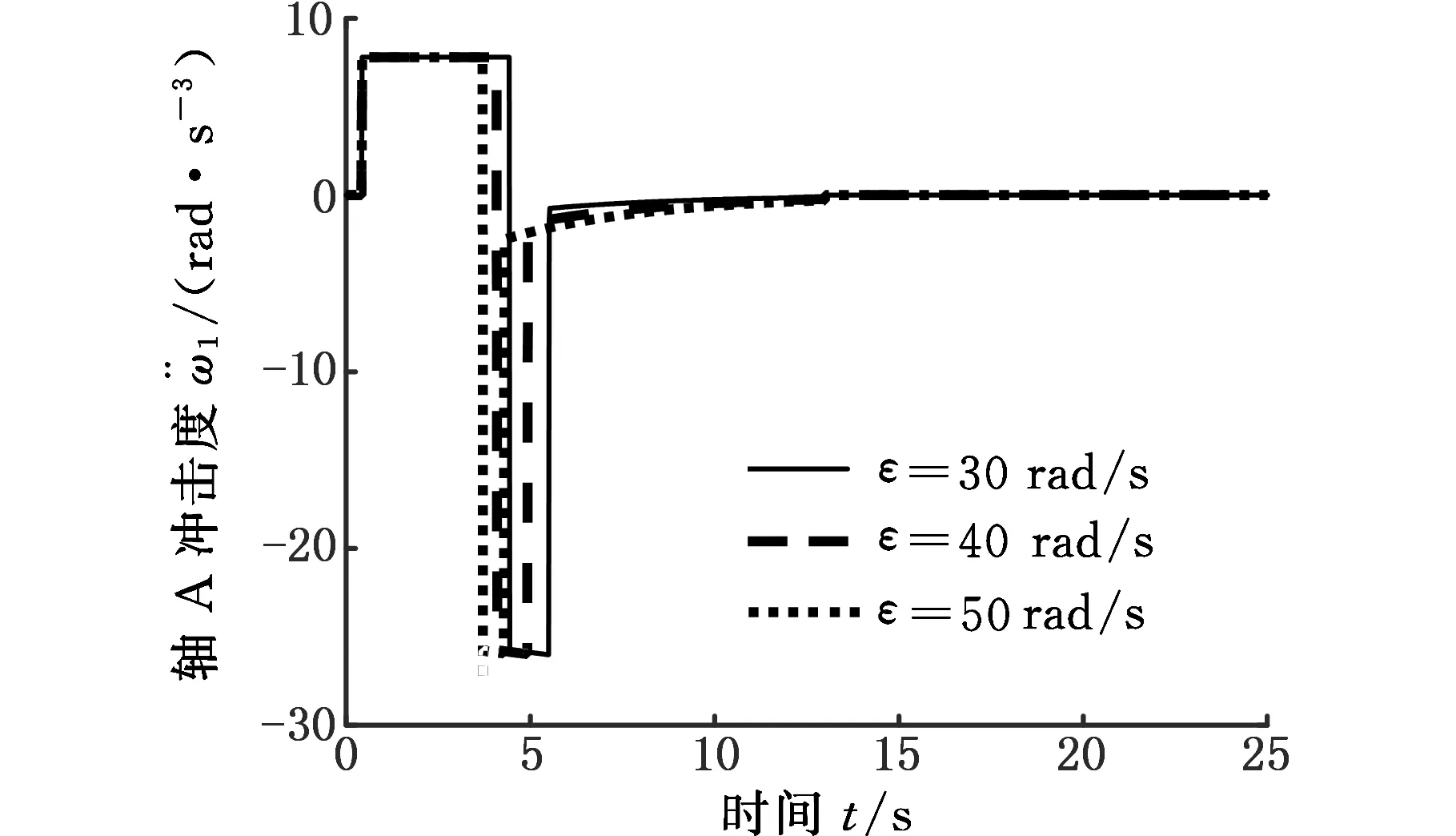
(b)轴A冲击度

(c)轴B冲击度

(d) 滑摩功ED图6 阈值ε对控制品质的影响Fig.6 Effects of slipping speed threshold ε on mode transition performance
考虑柴油机阻力矩Tf会受到发动机转速、输出力矩、发动机气缸压力、温度等因素的影响而发生变化,螺旋桨负载力矩Tpro也会受到螺旋桨转速、船舶行驶速度与航向、水流速度与流动状态等因素的影响而发生变化,故本文给出柴油机阻力矩Tf和螺旋桨负载力矩Tpro的扰动对切换品质的影响,如图7所示。由图7可以看出,Tf受到带宽为30 Hz、信噪比为50的白噪声干扰,而Tpro受到带宽为20 Hz、信噪比为50的白噪声干扰。由图7a~图7c可以看出,螺旋桨负载力矩Tpro扰动对轴A与轴B的动态特性影响都较大,原因在于该力矩较大,且作用于轴B,故轴B直接受到了影响;又由于该力矩引起轴B转速发生较大变化,根据MRC控制率,离合器力矩Tc也发生较大变化,从而导致轴A的动态特性间接受到了影响。柴油机阻力矩Tf相对较小,其扰动引起轴A轻微抖动,如图7b所示,但是对轴B的动态响应几乎没有影响。由图7d可以看出,柴油机阻力矩Tf的扰动对离合器滑摩功的影响很小,而螺旋桨负载力矩Tpro的扰动显著增大了滑摩功。

(a)轴B角加速度

(b)轴A冲击度

(c)轴B冲击度

(d)滑摩功ED图7 力矩Tf(t)和Tpro(t)扰动的影响Fig.7 Effects of disturbances of engine friction torque and propeller torque on mode transition performance
3.4 执行机构噪声对控制品质的影响

(a)轴B角加速度

(b)轴A冲击度

(c)轴B冲击度

(d)滑摩功ED图8 力矩TD(t)和Tc(t)扰动的影响Fig.8 Effects of disturbances of diesel engine torque and clutch torque on mode transition performance
考虑到柴油机力矩和离合器力矩会由于其执行机构的间隙、温度、摩擦等产生波动,故本文给出2个力矩分别受到二阶主频之下的干扰时对切换品质的影响,如图8所示。由图8可以看出,柴油机力矩受到带宽为30 Hz、信噪比为20的白噪声干扰,而离合器力矩受到带宽为20 Hz、信噪比为20的白噪声干扰[20-21]。由图8a~图8c可以看出,柴油机力矩受到干扰引起轴A冲击度增大,但对轴B角加速度与冲击度几乎没有影响,原因是该干扰被离合器隔离,没有直接作用于B轴;离合器力矩受到干扰使得轴A、轴B的角加速度都受到影响,冲击度都增大。比较图8d与图5h可以看出,2个力矩受到干扰产生较大滑摩功,特别是柴油机力矩受到干扰,使得轴A、轴B滑摩同步过程中转速差有所增大,且滑摩功增大至169.37 J。
4 结论
(1)本文针对混合动力船舶模式切换过程,提出了基于模型参考控制(MRC)的力矩协调控制策略。建立了动力传动系统动力学模型,并以纯电机驱动的动力学模型作为参考模型,然后推导出MRC的稳定性条件,在满足稳定性的前提下,以避免力矩突变引起的剧烈冲击为目标,给出了选择前馈和反馈控制参数的方法。
(2)仿真结果表明,与传统的快速逐步升压切换方法相比,本文研究的MRC能避免切换过程动力中断,降低传动轴冲击,并显著减小了离合器滑摩功。
(3)MRC的敏感性分析表明,①离合器参与动力切换的转速差阈值取值不同,MRC方法的冲击度不变,但是滑摩功随着阈值增大而增大;②螺旋桨负载力矩的扰动对离合器输入和输出传动轴的加速度、冲击度都产生较大影响,并增大离合器滑摩功;③柴油机输出力矩扰动对离合器输入传动轴的加速度、冲击度影响较大,但是对离合器输出轴几乎没有影响;④离合器力矩扰动对离合器输入传动轴和输出传动轴的加速度、冲击度的影响较明显,离合器滑摩功有所增大。
[1] DOERRY N, AMY J, KROLICK C. History and the Status of Electric Ship Propulsion, Integrated Power Systems, and Future Trends in the US Navy [J]. Proceedings of the IEEE,2015,103(12):2243-2251.
[2] HANSEN J F, WENDT F. History and State of the Art in Commercial Electric Ship Propulsion, Integrated Power Systems, and Future Trends [J]. Proceedings of the IEEE,2015,103(12):2229-2242.
[3] 吕和生. 船用湿式多片摩擦离合器耦合分析及试验研究[D]. 重庆:重庆大学,2010.
LYU Hesheng. Coupled Analysis and Experimental Research of Marine Wet Multi-plate Friction Clutch[D]. Chongqing: Chongqing University,2010.
[4] 程志刚, 费太军. 某型船用齿轮箱倒车离合器故障分析与改进措施[J]. 柴油机,2013,35(6):52-55.
CHENG Zhigang, FEI Taijun. Fault Analysis and Improvement Measure of Reverse Clutch of a Kind of Marine Gearbox[J]. Diesel Engine,2013,35(6):52-55.
[5] 魏伟,褚建新,王帆. 串联式混合动力船舶能源系统运行模式切换策略[J]. 船舶工程,2016,38(4):26-30.
WEI Wei, CHU Jianxin, WANG Fan. Operation Mode Switching Strategy of Series Hybrid Electric Ship Power System[J].Ship Engineering,2016,38(4):26-30.
[6] 高迪驹, 沈爱弟, 褚建新,等. 混合动力船舶的能量管理与控制策略[J]. 上海海事大学学报,2015(1):70-74.
GAO Diju, SHEN Aidi, CHU Jianxin, et al. Energy Management and Control Strategy for Hybrid Electric Ships[J]. Journal of Shanghai Maritime University,2015(1):70-74.
[7] 陈江华. 液力偶合器液力计算法及共同工作特性仿真[D]. 哈尔滨:哈尔滨工业大学,2007.
CHEN Jianghua. Fluid Coupling Hydrodynamic Calculation Method and Simulation on the Combined Working Characteristic[D]. Harbin: Harbin Institute of Technology,2007.
[8] HENDRY M L, ZEKAS B M. US Navy Experience with SSS (Synchro-Self-Shifting) Clutches [J]. Mechanical Engineering,2008,132(8):463-474.
[9] JIANG Desong. The Study on Dynamic Parameters of CODOG in the Mode Switching Process [C]// IEEE/ASME International Conference on Mechtronic and Embedded Systems and Applications. Beijing, China,2008:500-504.
[10] HAUSCHILDT M R, MILLER C L. US Navy PG-84 Class CODOG Propulsion Plant[R]. SAE Technical Paper,1967.
[11] 高晓敏, 王晓明. 现代船用离合器技术的发展[C]// 机械技术史. 南京,2000:456-462.
GAO Xiaomin, WANG Xiaoming. Modern Technological Development of Clutches for Marine Application[C]// History of Mechanical Technology and Mechanical Design. Nanjing,2000:456-462.
[12] MAIA C A, HARDOUIN L, SANTOS-MENDES R, et al. On the Model Reference Control for Max-Plus Linear Systems [C]// Decision and Control, 2005 and 2005 European Control Conference. Cdc-Ecc’05. IEEE Conference on IEEE. Seville, Spain,2006:7799-7803.
[13] CHOW H W, CHEUNG N C. Disturbance and Response Time Improvement of Submicrometer Precision Linear Motion System by Using Modified Disturbance Compensator and Internal Model Reference Control [J]. Industrial Electronics,2013,60(1):139-150.
[14] FANG Chaohong, CAO Zhenwei, EKTESABI M M, et al. Model Reference Control for Active Drivability Improvement [C]//Modelling, Identification & Control (ICMIC), 2014 Proceedings of the 6th International Conference on IEEE. Melbourne, VIC, Australia,2014:202-206.
[15] WEN Boxuan, WANG Weida, XIANG Changle, DU Feng. Model Reference Control Strategy for the Mode Transition of Electro-Mechanical Transmission [C]//Mechatronics and Automation (ICMA), 2014 IEEE International Conference on IEEE. Tianjin,2014:1108-1112.
[16] CHEN Li, XI Gang, SUN Jing. Torque Coordination Control During Mode Transition for a Series-Parallel Hybrid Electric Vehicle [J]. IEEE Transactions on Vehicular Technology,2012,61(7):2936-2949.
[17] ROA M J. Application of Classification Rules to Hybrid Marine Electrical Propulsion Plants [C]// IEEE Petroleum and Chemical Industry Committee Conference. Houston, TX, USA,2015:1-7.
[18] 龚益华. 船舶原理 [M]. 北京:国防工业出版社,1965.
GONG Yihua. Shipping Principle [M]. Beijing: National Defence Industry Press,1965.
[19] WILLIAMS R L, LAWRENCE D A. Linear State-space Control Systems [M]. New Jersey: John Wiley & Sons,2007.
[20] 张冶. 6S50MC-C船舶柴油机轴系扭转振动计算研究[D]. 大连:大连海事大学,2009.
ZHANG Ye. Research of 6S50MC-C Marine Diesel Engine Shaft Torsion Vibration Calculation[D]. Dalian: Dalian Maritime University,2009.
[21] 边克勤. 8DKM-(28)F船舶柴油机轴系扭振计算研究[D]. 大连:大连海事大学,2008.
BIAN Keqing. Research of 8DKM-(28)F Marine Diesel Engine Shaft Torsion Vibration Calculation[D]. Dalian: Dalian Maritime University,2008.
TorqueCoordinationControlduringModeTransitionsforaHybridShip
ZHU Jianyun1,2CHEN Li1,2PENG Cheng1,2
1.State Key Laboratory of Ocean Engineering of Shanghai Jiao Tong University, Shanghai, 200240 2.Collaborative Innovation Center for Advanced Ship and Deep-Sea Exploration, Shanghai, 200240
During the mode transitions of the hybrid ships, unexpected torque fluctuations, intensive shaft jerk and clutch over wear tended to occur. A new torque coordination control method of MRC was proposed to address these problems. Dynamics models were built, followed by the reference model. The MRC algorithm was derived. The results show that compared with the conventional method, MRC may reduce power interruption and shafting dramatic impacts effectively. At the same time, the clutch friction loss is reduced evidently. Further, sensitivity analysis illustrates the effects of the external disturbances and the actuation noises on the transition performance.
hybrid ship;mode transition;overactuated system;model reference control(MRC)
U664.2
10.3969/j.issn.1004-132X.2017.23.013
2016-12-27
国家自然科学基金资助项目(51475284)
(编辑胡佳慧)
朱剑昀,男,1989年生。上海交通大学船舶海洋与建筑工程学院博士研究生。主要研究方向为船舶混合动力推进系统设计与控制。E-mail:JerryChu1989@sjtu.edu.cn。陈俐,女,1973年生。上海交通大学船舶海洋与建筑工程学院副教授。彭程,女,1993年生。上海交通大学船舶海洋与建筑工程学院硕士研究生。
猜你喜欢
汽车与新动力(2019年5期)2019-11-07
汽车观察(2019年2期)2019-03-15
中学课程辅导·教师通讯(2018年10期)2018-09-04
中学生数理化·高一版(2017年3期)2017-07-08
汽车维修技师(2017年9期)2017-02-04
火控雷达技术(2016年1期)2016-02-06
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
汽车与新动力(2015年1期)2015-02-27
客车技术与研究(2014年5期)2014-02-28
